


Virtuelle Demo von Addcomposites zur Herstellung eines AFP-Verbundlaminats
Um den gesamten Prozess des digitalisierten Verbundaufbaus mitzuerleben, müssen Sie normalerweise reisen und die Einrichtung besuchen, in der die AFP/ATL-Systeme laufen. Dieser Blog-Beitrag von Addcomposites führt Sie durch ein virtuelles Demo-Video-Erlebnis und zeigt, wie Sie das kompakte Plug-and-Play-AFP-XS-System des Unternehmens zur Herstellung von Verbundprodukten oder -formen programmieren und betreiben.
Zu verlegendes Objekt
Für die allererste Demo beginnen wir mit einer wirklich einfachen rechteckigen Form. Das rechteckige Basislaminat ist 400 × 450 Millimeter groß mit einem zentralen Patch-Laminat von 100 × 150 Millimetern.
- Das Basislaminat hat eine Faserorientierung von [0 Grad / 90 Grad /+45 Grad /-45 Grad]
- Das zentrale Patch-Laminat hat eine Ausrichtung von [+45 Grad / -45 Grad].
- Das gesamte sechslagige Laminat muss ohne Überlappungen in der Faser verlegt werden und der maximal zulässige Spalt betrug 1 Millimeter.
Offline-Programmierung:ADDpath
Die ADDpath-Software ist ein Plug-In für die häufig verwendete CAD-Modellierungsplattform Rhino. Das Hauptmerkmal der Erstellung der Planungssoftware mit diesem Ansatz bietet:
- Zugänglichkeit :Der ADDpath wurde mit dem Ziel der Zugänglichkeit und Anpassung entwickelt. Die offene Plattform ermöglicht die Verwendung verschiedener Materialverwendungen, Layup-Techniken, Faserwege und Formformen.
- Schnelle Einrichtung :ADDpath erfordert eine minimale Installationszeit, und da die meisten Universitäten/F&E-Zentren/technische Cluster über bestehende Rhino-Abonnements verfügen, gibt es keine zusätzliche Lernkurve oder Infrastrukturinvestitionen.
- Freiheit :Das Rhino-Ökosystem ermöglicht visuelle Programmierelemente, die auf den von ADDpath generierten Programmen implementiert werden können.
Prozess
Der Programmierprozess ist von Natur aus ziemlich intuitiv und die Befolgung dieser einfachen Schritte wird den Erfolg sicherstellen.
- Importieren Sie die CAD-Datei im .stp-Format in ADDpath.
- Beginnen Sie mit dem Hinzufügen der Auflegereihenfolge [0 Grad / 90 Grad / +45 Grad / -45 Grad] für die Basisschicht
- Überprüfe die Layup- und Speed-Parameter
- Klicken Sie auf "Layup hinzufügen" und wählen Sie die Grundfläche aus. Jetzt können Sie sehen, dass Layup 1 im Layup-Fenster erscheint.
- Geben Sie die Layup-Sequenz für das zentrale Patch-Laminat ein [+45 Grad / -45 Grad].
- Klicken Sie auf „Layup hinzufügen“ und wählen Sie die zentrale Patchfläche aus. Jetzt können Sie sehen, dass Layup 2 im Layup-Fenster erscheint.
- Um das Layup abzuschließen, klicken Sie auf "Layup planen". Dadurch wird das für das Layup benötigte Material und die Zeitschätzung für das Layup angezeigt.
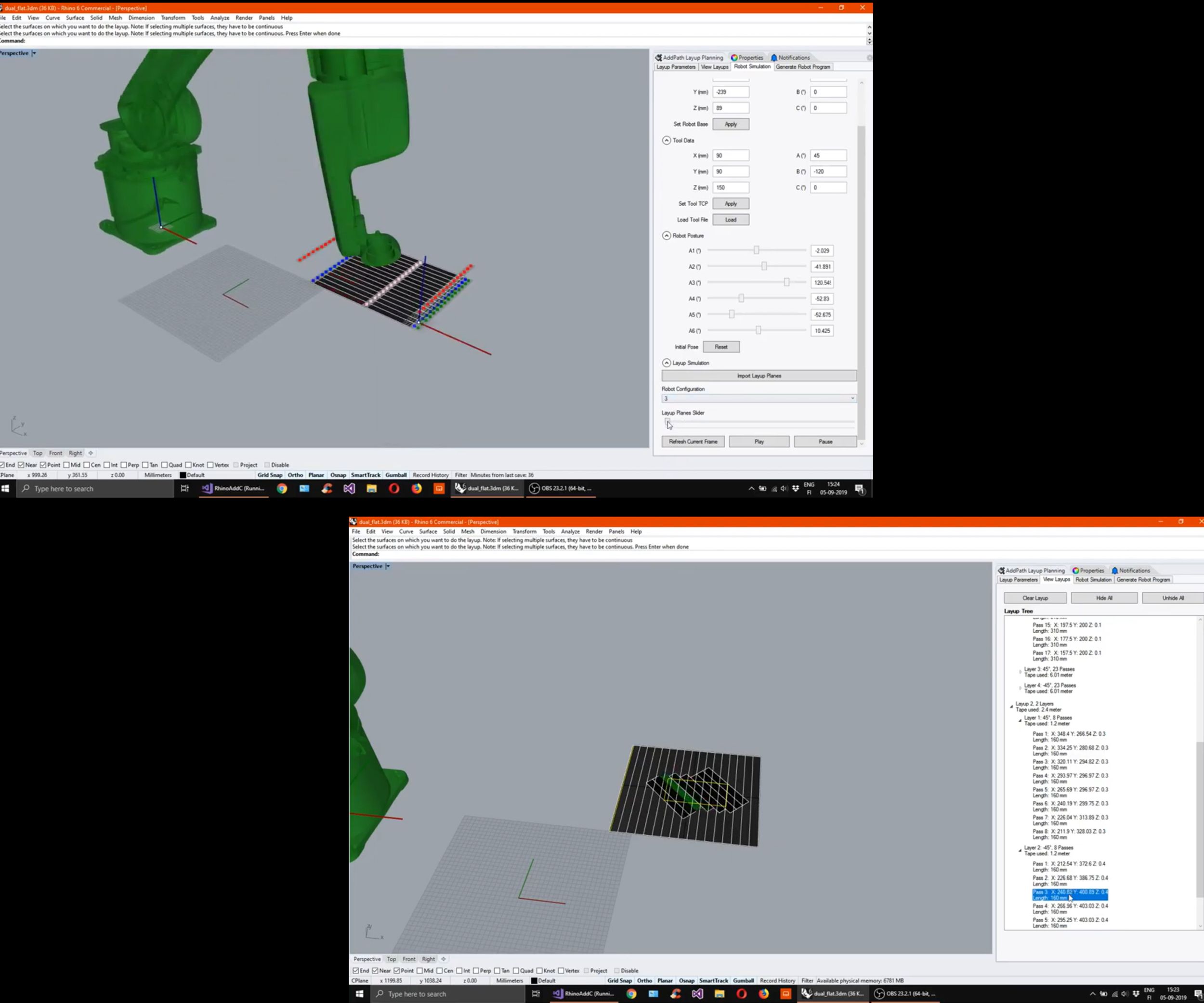
- Jetzt können wir das geplante Layup durch den Layup-Baum visualisieren. Hier haben Sie die Möglichkeit, einzelne Durchgänge zu unterdrücken, einzelne Ebenen zu visualisieren und mehr.
- Jetzt gehen wir in die Simulationsphase über, in der wir sehen, wie der Roboter (erfordert nur einen anfänglichen Upload, dann ist er jedes Mal danach verfügbar) erscheint und den Layup jedes Durchgangs simuliert. Derzeit wird der Roboter rosa, wenn er ein Soft-Limit erreicht, und rot, wenn er ein Hardware-Limit erreicht. Die kommende Version wird auch eine Kollisionserkennung zwischen dem AFP-XS und dem Schimmel haben.
- Während der Visualisierung können Sie durch die Frames der Roboterbewegung gleiten, um einen reibungslosen Betrieb in der virtuellen Umgebung zu gewährleisten. Dies hilft bei der Optimierung des Betriebs und der Unfallvermeidung während des tatsächlichen Betriebs. Alternativ können Sie auf „Play“ klicken, um eine vollständige Animation Ihres Layups anzuzeigen.
- Wenn Sie mit Ihrer Simulation und Ihrem Layup zufrieden sind, klicken Sie auf "Roboterprogramm generieren". Dadurch wird Code in der angegebenen Robotersprache erstellt. Diese steht aktuell für KUKA zur Verfügung, wofür Sie das generierte Programm mit der Anwendung OrangeEdit visualisieren können. Speichern Sie das generierte Programm auf Ihrem USB-Stick und übertragen Sie es anschließend auf die KUKA Steuerbox.
Um den gesamten Blog mit Videos zu lesen, gehen Sie zu:https://www.addcomposites.com/post/virtual-demo-how-to-make-flat-laminate-using-afp-xs
Harz
- Wie man Verarbeiter vertrauenswürdig macht
- So erstellen Sie eine Arduino+Raspberry Pi-Roboterplattform
- Wie man die zustandsbasierte Wartung effektiver macht
- Wie man Glasfaser herstellt
- Wie man eine Spritzgussform herstellt
- Wie man Lieferkettendaten vertrauenswürdig macht
- So erstellen Sie eine Cutaway-Animation in Solidworks
- So erstellen Sie einen Prototyp
- Ersetzen eines Hydraulikschlauchs
- Wie man ein umfassendes Sicherheitsprogramm zum Laufen bringt