


Gastblog – Charles Guan rüstet mit Markforged auf (und ab)
Dieser Gastblog wurde von Charles Guan verfasst, einem Absolventen des MIT Maschinenbau und ehemaliger Lehrer für Maschinenwerkstatt und Design am MIT. Er ist auch der Erbauer der Roboterüberholung auf ABCs BattleBots, die diesen Sommer donnerstags um 20:00 Uhr Eastern/19:00 Uhr Central ausgestrahlt wird. Er arbeitet als technischer Berater für Robotik und Transportwesen und wird von Markforged gesponsert, um an BattleBots teilzunehmen. Schauen Sie sich seine Website und Equals Zero Robotics an.
Einige Kampfroboter-Hintergrundbilder

In der Roboterkampfwelt gibt es ein paar grundlegende Designs, die du ständig siehst – deine Keile, Flossen, Hämmer, rotierenden Rotoren und so weiter. Wie das legendäre Pokémon sind einige Designs „heilige Grals“, die selten gesehen und noch seltener in der Arena gut ausgeführt werden. Der „Schwungradflipper“ ist einer davon. Typischerweise sind Ihre Hochgeschwindigkeits-Wendearme, die Ihre Gegner mehrere Meter in die Luft werfen, pneumatisch. Aber Pneumatik ist zwar leistungsdicht, aber nicht energiereich, und selbst die besten Flossen bekommen weniger als ein Dutzend gute Schüsse, bevor ihnen buchstäblich das Benzin ausgeht. Der elektrische Schwungradflipper kombiniert die hohe Energiedichte von Batterien mit der hohen Leistungsverfügbarkeit der kinetischen Energie eines Schwungrades.
Diese Energie in eine schnell freisetzbare, aber kontrollierbare Form zu kanalisieren, war schwer fassbar. Zu den Designherausforderungen gehören ein zuverlässiger Eingriffsmechanismus, ein konsistentes Timing, eine allmähliche Beschleunigung und eine robuste Verbindung zum Geschäftsende. Vermassele eine davon und du hättest genauso gut eine kinetische Energiegranate bauen können.
Nur wenige Beispiele in der gesamten Geschichte des Roboterkampfes wurden gemacht. Am kleinen Ende gibt es Zac O'Donnells Serie von Robotern der Klasse 3 bis 30 Pfund, einschließlich seines Bots Magneato, und Dale Heatheringtons relativ erfolgreiche Designs. Für die großen Bots war Warrior der Maßstab.

Wie Sie bemerken, verwendet jeder dieser Bots einen anderen Designansatz und einen anderen endgültigen Mechanismus. Dies veranschaulicht den Grad der Erforschung, den das Design in der Community hatte; Roboterdesigns neigen dazu, ähnlich zu wachsen, da die Bauherren eine lokal optimale Lösung finden, so dass ein Waffendesign mit mehreren Mitteln zum Zweck noch ungezähmt ist.
Seit einigen Jahren suche ich nach einer kompakten, koaxialen Lösung des Problems, die mit einem „spitzen Schwungrad“ – einer sich drehenden Trommel oder Scheibe mit Zähnen – inline montiert und auf der anderen Seite mit einem Mechanismus verbunden werden kann der Roboter. Das macht einen Dual-Waffen-Roboter mit vielen strategischen Möglichkeiten aus. Also dachte ich mir, dass ich die Nebensaison zwischen den BattleBots-Turnieren nehmen würde, um diese Idee in einem kleinen 3-Pfund-Roboter weiter zu verfolgen, meine Designfähigkeiten auf dem neuesten Stand zu halten und eine andere Lösung für die Community zu finden. Warum ein Roboter der 3lb-Klasse? Weil es eine einfache Größe ist, mit der Sie mit einem Mark Two drucken können!

Design des 3D-gedruckten Getriebemechanismus
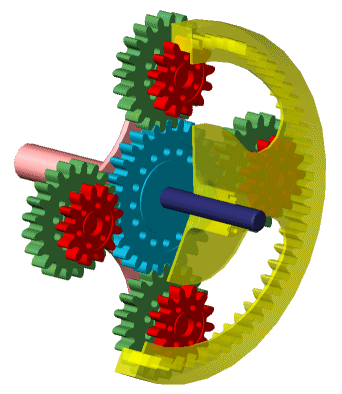
Die Anforderungen umfassen das Packen eines sehr hohen Übersetzungsverhältnisses (in der Größenordnung von 20 oder mehr zu 1) in ein koaxiales Volumen und das Finden einer Möglichkeit, diese Untersetzung nur bei Bedarf einzuschalten. Ich untersuchte Planetengetriebesysteme, die als zusammengesetzte Planetengetriebe bekannt sind, indem ich mehrere Nachschlagewerke herausbrachte, darunter das ehrwürdige „Mechanisms and Mechanical Devices Sourcebook“, und das Internet nach Design-Whitepapers durchsuchte. Kurz gesagt, dies ermöglicht die Erzeugung extrem hoher Übersetzungsverhältnisse im gleichen Volumen wie bei einem einfachen Planetengetriebe, indem die relative Geschwindigkeit von zwei Hohlrädern leicht unterschiedlicher Größe genutzt wird.
Nach einer kurzen Zeit mit dem Entwerfen von kundenspezifischen Klauenkupplungen und Reibbändern wurde mir klar, dass ich nur mein eigenes Automatikgetriebe entwickle. Komplizierte Dinge leben im Kampf normalerweise nicht lange, daher musste ich mir eine andere Möglichkeit überlegen, dieses Untersetzungssystem zu verwenden. Die Lösung lag in der Verwendung des Radsatzes als Drehmomentverzweiger. Sie kennen dies vielleicht als Toyotas „Hybrid Synergy Drive“ oder unter einer Reihe anderer geschützter Namen für stufenlose Getriebe. Diese Entdeckung kam, wie viele in der Geschichte, zufällig – ich drehte mein CAD-Modell und stellte fest, dass das Verankern eines Hohlrads das andere immer noch drehte und umgekehrt. Ich hatte vergessen, dass „relative Geschwindigkeit“ bedeutet, dass eine dieser Geschwindigkeiten Null sein kann.
Aufgeregt modellierte ich schnell ein Spielzeug-Ring- und Planetenrad-Set und druckte es mit Onyx auf einem Mark Two. Onyx ist das einzige Material, von dem ich überzeugt bin, dass es stark und steif genug ist. Aufgrund der geringen Größe des Roboters war ich in Bezug auf die Zahngrößen begrenzt, die ich verwenden konnte. normale Nylonzähne wären viel zu flexibel gewesen. Daher wollte ich das Spielzeugmodell auch als Toleranzmaß für das Endprodukt nutzen, falls ich kleinere Maßänderungen vornehmen musste. Das Modell bestätigte meine Hypothese, dass ich nur einen Gang mit irgendeiner Methode plötzlich stoppen musste – durch Bremsen, Kupplung oder einfach durch einen Stock durch die Radspeichen des Fahrrads, und der andere Ring wird gezwungen, sich zu drehen!

Für den Roboterkampf gerüstet
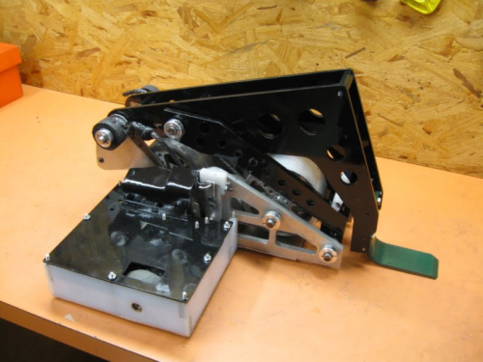
Danach wurde ernsthaft mit der Arbeit am Roboter begonnen. Ich zog einige meiner Ideenskizzen aus der Vergangenheit heraus und beschloss, einfach ein CAD-Modell für den ersten Durchgang zu erstellen, um das Konzept festzuhalten und von dort aus an individuellen Designanforderungen zu arbeiten. Um es kurz zu machen, hier ist ein Foto des Designs, wie es jetzt steht!
Was ist denn hier los? Es hat einen dreieckigen Körper, der umgedreht werden kann – es gibt kein „auf dem Kopf“ zu sprechen. Das runde silberne Objekt auf der linken Seite ist ein 8-Unzen-Aluminiumrotor mit Innensechskantschrauben als "Zähne", eine gängige Taktik in dieser kleinen Gewichtsklasse für Spinnwaffen. Der Planetenmechanismus ist in Schwarz (für Onyx) modelliert, und ein Servomotor drückt auf Befehl einen Schiebezahn in das gekerbte Hohlrad, wodurch es gezwungen wird, sich zu drehen und das andere Hohlrad zu starten. Dieses Hohlrad hat eine versetzte Nockennase mit einer Pleuelstange zu einem "Schmetterlingsgestänge", das die oberen und unteren Metallflügel auseinanderdrückt, wenn sich die Nocke dreht. Die Metallflügel sind an einem gemeinsamen Punkt angelenkt, sodass einer gegen den Boden reagiert, während der andere alles, was sich gerade darüber befindet, nach oben hebt.
Es gibt noch Details und geometrische Probleme, die noch gelöst werden müssen, bevor dieses Design fertig ist, aber ich bin jetzt vom Konzept überzeugt. Es hat seine Schattenseiten – zum Beispiel, wenn der Schiebezahn klemmt, ist der Mechanismus immer eingeschaltet und der Bot könnte seine Mobilität verlieren. Wenn es ohne Gewicht auf den Flügeln Trockenfeuer abfeuert, wird es sich wahrscheinlich selbst auf das Dach schicken. Aber zu sehen, wie sich die Mängel deines Designs deutlich bemerkbar machen, ist Teil des Spaßes am Sport, also bin ich gespannt, was mit diesem Bot passieren wird!
Hier ist eine Demo des Systems:
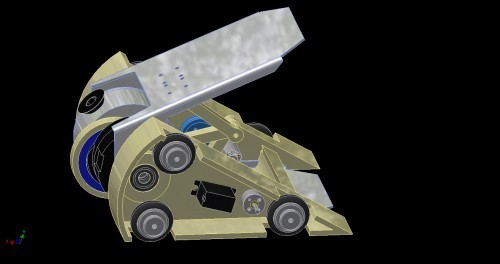
Und hier noch ein paar Bilder vom Design:


Fotos mit freundlicher Genehmigung von Charles Guan.
3d Drucken
- Interview mit einem Experten:Ibraheem Khadar von Markforged
- Vorrichtungen und Vorrichtungen:6 Möglichkeiten zur Verbesserung der Produktionseffizienz mit 3D-Druck
- Bauen Sie Ihren internetgesteuerten Videostreaming-Roboter mit Arduino und Raspberry Pi
- Warte nicht mehr. Mit Zuverlässigkeit.
- Schnellere Konstruktion und Fertigung mit Formlabs und Fusion 360
- Stratasys geht eine Partnerschaft mit GrabCAD und e-Xstream ein
- Korrektur des Chaos mit SOLIDWORKS und MakerBot
- Gesicht zuerst:Kevlar® Nasenschutz mit Markforged
- Markforged dominiert im Roboterkampf
- Pick and Place – ein perfektes Beispiel für den Robotereinsatz mit EasyWork