


Der Robo-Seestern von MIT CSAIL ermöglicht eine genauere Untersuchung des Meereslebens
Wissenschaftler haben einen „Robo-Seestern“ erfunden, der uns mehr Einblicke in das Leben im Wasser gibt, wie Adam Conner-Simons oder MIT CSAIL berichtet. (Siehe Video unten.)
Biologen kennen sich seit langem mit den Herausforderungen der Dokumentation des Meereslebens aus, wobei sich viele Fischarten als sehr empfindlich für die Unterwasserbewegungen von Menschen erweisen.
Als mögliche Lösung haben Informatiker spezielle Meeresroboter entwickelt, die sich heimlich zwischen ihren kohlenstoffbasierten Gegenstücken bewegen können. Im Jahr 2018 stellte beispielsweise ein Team des Computer Science and Artificial Intelligence Lab (CSAIL) des MIT einen weichen Roboterfisch her, der autonom mit echten Fischen entlang der Korallenriffe von Fidschi schwamm.
Die komplexe Dynamik, wie sich Wasser bewegt – und seine Fähigkeit, einige perfekt funktionierende elektronische Systeme schnell zu ruinieren – hat die Entwicklung von Unterwasserrobotern im Vergleich zu Robotern für Luft oder Land besonders schwierig gemacht.
Bei dem Fisch musste das CSAIL-Team monatelange Versuche und Irrtümer durchlaufen, um das Design manuell zu optimieren, damit es tatsächlich zuverlässig im Wasser funktioniert.
Dieser Roboter war zwar besonders komplex, aber eine Gruppe unter der Leitung der MIT-Professoren Wojciech Matusik und Daniela Rus war der Meinung, dass der Produktionsprozess noch beschleunigt werden könnte. Vor diesem Hintergrund haben sie jetzt ein neues Werkzeug zur Simulation und Herstellung eines funktionsfähigen Softroboters in wenigen Stunden entwickelt.
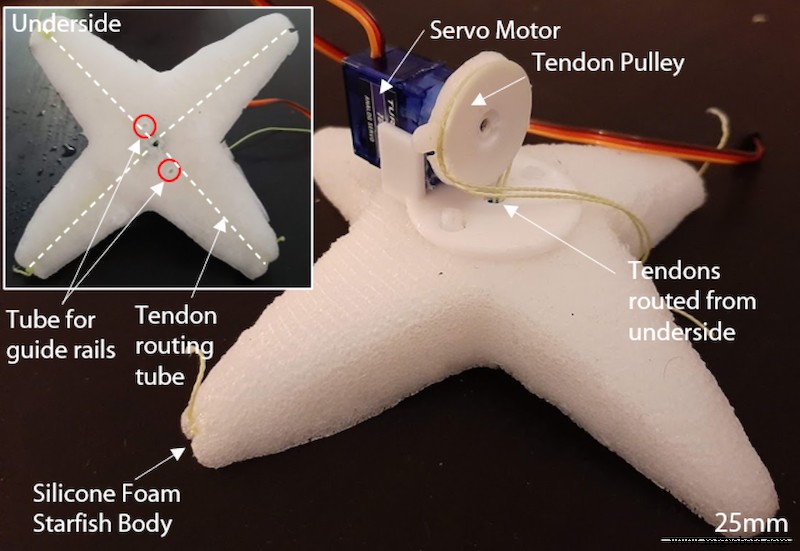
Das Team verwendete sein System, um einen weichen Roboter-Seestern aus Silikonschaum herzustellen, der sich mit einem einzigen Aktuator mit geringer Leistung bewegen kann. Der Seestern bewegt sich über Sehnen in seinen vier Beinen, die mit einem Servomotor verbunden sind, der verwendet wird, um die Beine zu beugen und zu entspannen.
CSAIL-Postdoc Josephine Hughes, Co-Hauptautorin eines neuen Artikels zusammen mit dem Doktoranden Tao Du über Seesterne, sagt:„Die passiven Wechselwirkungen zwischen einem Unterwasserroboter und den ihn umgebenden Fluidkräften – ob es sich um eine ruhige Strömung oder eine wogende Welle handelt – sind viel komplizierter, als wenn ein Roboter auf stabilem Gelände läuft, was die Erstellung seiner Steuerungssysteme ziemlich schwierig macht.
„Aber mit diesem Simulator kann ein Prozess, der normalerweise Tage oder Wochen dauern würde, in nur wenigen Stunden ablaufen.“
Du sagt, dass das Team ein Seestern-Design aufgrund der Einfachheit und Eleganz seiner Bewegung gewählt hat, wobei das Zusammendrücken und Loslassen seiner Beine eine Vorwärtsbewegung erzeugt.
Das Team stellte jedoch fest, dass der Simulator für eine Reihe von Körpertypen geeignet ist, und wird daher als nächstes Designs untersuchen, die von Meeresschildkröten, Mantarochen und Haien inspiriert sind und komplexere Strukturen wie Gelenke, Flossen und Flossen beinhalten.
Das Tool der Gruppe umfasst ein maschinelles Lernmodell, das eine anfängliche Simulation und ein Design der Steuermechanismen des Roboters durchführt, der dann schnell hergestellt wird.
Reale Experimente mit dem Roboter werden dann verwendet, um mehr Daten zu sammeln, um sein Design immer wieder zu verbessern und zu optimieren. Das Ergebnis ist, dass der Roboter in der Regel nur noch einmal umgebaut werden muss. (Ein separates Papier über die Entwicklung des Simulationstools wird derzeit geprüft.)
„Bei der Robotersimulation müssen wir Annäherungen vornehmen, die per Definition eine Lücke zwischen Simulation und Realität schaffen“, sagt Cecilia Laschi, Professorin für Steuerung und Mechatronik an der National University of Singapore, die nicht an der Forschung beteiligt war /P>
„Diese Arbeit soll diese Realitätslücke mit einer gemischten Schleife aus simulierten und realen Experimenten verringern, die sehr effektiv ist.“
Für den Körper des Seesterns verwendete das Team Silikonschaum wegen seiner elastischen Eigenschaften, seines natürlichen Auftriebs und seiner Fähigkeit, schnell und einfach hergestellt zu werden. In Experimenten fanden die Forscher heraus, dass sich der Seestern viermal schneller durch das Wasser bewegen konnte als mit einem handgefertigten Controller von einem menschlichen Experten.
Tatsächlich, so Hughes, habe das Team entdeckt, dass der Simulator Kontrollstrategien zu verwenden scheint, auf die Menschen selbst nicht gekommen wären.
„Bei den Roboter-Seesternen haben wir gelernt, dass es zusätzlich zu ihren gut sichtbaren Beinantrieben einige subtilere Hochfrequenzbewegungen gibt, die ihnen einen wichtigen Impuls verleihen können“, sagt Hughes.
Das Projekt baut auf einer Reihe von CSAIL-Projekten auf, die sich auf weiche Roboter konzentrieren, von denen Rus sagt, dass sie das Potenzial haben, sicherer, robuster und flinker zu sein als ihre Gegenstücke mit starrem Körper.
Forscher haben sich in Umgebungen, in denen es erforderlich ist, sich durch enge Räume zu bewegen, zunehmend weichen Robotern zugewandt, da solche Roboter widerstandsfähiger sind, wenn es darum geht, sich von Kollisionen zu erholen.
Laschi sagt, dass das Tool des Teams verwendet werden könnte, um Roboter für die Messung von Daten an verschiedenen Orten in der Tiefsee zu entwickeln und sich allgemein Roboter vorzustellen, die sich auf neue Arten bewegen können, an die Forscher noch nicht gedacht haben.
„Bio-inspirierte Roboter wie der Seestern-Roboter und SoFi können dem Meeresleben näher kommen, ohne es zu stören“, sagt Rus. „In Zukunft wird es durch schnelles Entwerfen und Bauen von bioinspirierten Roboterinstrumenten möglich sein, benutzerdefinierte Observatorien zu schaffen, die in der Wildnis eingesetzt werden können, um das Leben zu beobachten.“
Du und Hughes haben das Papier zusammen mit Matusik, Rus und dem MIT-Studenten Sebastien Wah geschrieben. Das Papier wurde diese Woche im Journal of Robotics Automation Letters veröffentlicht und wird nächsten Monat auch virtuell auf der IEEE International Conference on Soft Robotics (RoboSoft) präsentiert.
Automatisierungssteuerung System
- Sepro bietet seinen ersten Roboter "Made-in-America"
- Roboter bei NPE:Schneller, stärker, intelligenter
- Die Roboter auf Trab halten
- Spritzguss:Schnellere Roboter und Cobots
- Roboter- und Cobot-Hersteller schließen sich zusammen
- Neu gestaltete 5-Achsen-Allzweckroboter-Reihe
- Omron bringt neuen SCARA-Roboter auf den Markt
- Nachi-Fujikoshi erweitert sein Angebot an kompakten Roboterserien
- 5 Dinge, die Sie vor dem Kauf eines Roboters beachten sollten
- Roboter erhalten Hand-Auge-Koordination