


Zurückhaltungsmotor
Der Motor mit variabler Reluktanz basiert auf dem Prinzip, dass sich ein ungehindertes Stück Eisen bewegt, um einen magnetischen Flusspfad mit minimalem Widerstand zu vervollständigen , das magnetische Analogon des elektrischen Widerstands.
Synchrone Reluktanz
Wenn das Drehfeld eines großen Synchronmotors mit ausgeprägten Polen stromlos ist, entwickelt er immer noch 10 oder 15 % des Synchrondrehmoments. Dies ist auf die variable Reluktanz während einer Rotorumdrehung zurückzuführen. Es gibt keine praktische Anwendung für einen großen Synchronreluktanzmotor. In kleinen Größen ist es jedoch praktisch.
Wenn in den leiterlosen Rotor eines Asynchronmotors Nuten geschnitten werden, die den Statornuten entsprechen, wird ein Synchronreluktanzmotor Ergebnisse.
Er startet als Asynchronmotor, läuft aber mit einem geringen Synchrondrehmoment. Das synchrone Drehmoment ist auf Änderungen der Reluktanz des magnetischen Pfads vom Stator durch den Rotor zurückzuführen, wenn die Nuten ausgerichtet sind.
Dieser Motor ist ein kostengünstiges Mittel, um ein moderates Synchrondrehmoment zu entwickeln. Niedriger Leistungsfaktor, niedriges Auszugsdrehmoment und niedriger Wirkungsgrad sind charakteristische Merkmale des direkt über die Stromleitung angetriebenen Motors mit variabler Reluktanz. Dies war der Status des Motors mit variabler Reluktanz für ein Jahrhundert vor der Entwicklung der Halbleiterleistungssteuerung.
Geänderte Zurückhaltung
Wird ein Eisenrotor mit Polen, aber ohne Leiter, an einen mehrphasigen Stator montiert, wird ein geschalteter Reluktanzmotor , die sich mit dem Statorfeld synchronisieren kann, ergibt sich. Wenn ein Polpaar der Statorspule erregt wird, bewegt sich der Rotor auf den Pfad mit der niedrigsten magnetischen Reluktanz (Abbildung unten).
Ein Motor mit geschalteter Reluktanz wird auch als Motor mit variabler Reluktanz bezeichnet. Die Reluktanz des Rotors zum Statorflusspfad variiert mit der Position des Rotors.
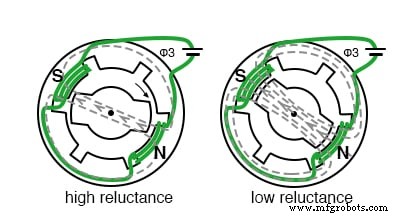
Reluktanz ist eine Funktion der Rotorposition in einem Motor mit variabler Reluktanz
Durch sequentielles Schalten (Abbildung unten) der Statorphasen wird der Rotor von einer Position zur nächsten bewegt. Der magnetische Fluss sucht den Weg der geringsten Reluktanz. Unten sind ein stark vereinfachter Rotor und Wellenformen, die den Betrieb veranschaulichen.
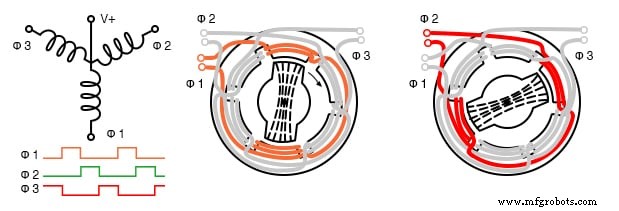
Motor mit variabler Reluktanz, zu stark vereinfachte Bedienung
Wenn ein Ende jeder 3-Phasen-Wicklung des geschalteten Reluktanzmotors über eine gemeinsame Zuleitung herausgeführt wird, können wir die Funktionsweise wie bei einem Schrittmotor erklären (Abbildung oben). Die anderen Spulenanschlüsse werden nacheinander in einem Wellenantrieb nacheinander auf Masse gezogen Muster. Dadurch wird der Rotor von dem im Uhrzeigersinn um 60° . rotierenden Magnetfeld angezogen Inkremente.
Verschiedene Wellenformen können Motoren mit variabler Reluktanz antreiben (Abbildung unten). Der Wellenantrieb (a) ist einfach und erfordert nur einen einpoligen unipolaren Schalter. Das ist eine, die nur in eine Richtung wechselt. Mehr Drehmoment wird durch den bipolaren Antrieb (b) bereitgestellt, erfordert jedoch einen bipolaren Schalter.
Der Leistungstreiber muss abwechselnd hoch und niedrig ziehen. Wellenformen (a &b) gelten für die Schrittmotorversion des Motors mit variabler Reluktanz. Für einen reibungslosen, vibrationsfreien Betrieb ist die 6-stufige Approximation einer Sinuswelle (c) wünschenswert und einfach zu erzeugen.
Sinuswellenantrieb (d) kann von einem Pulsweitenmodulator (PWM) erzeugt oder aus der Stromleitung gezogen werden.
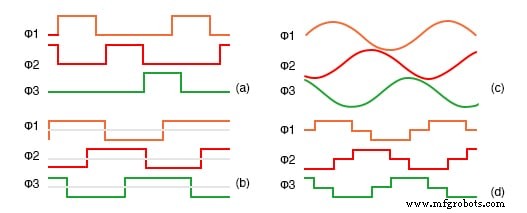
Variable Reluktanz-Motorantriebswellenformen:(a) unipolarer Wellenantrieb, (b) bipolarer Vollschritt (c) Sinuswelle (d) bipolarer 6-Schritt
Eine Verdoppelung der Anzahl der Statorpole verringert die Drehzahl und erhöht das Drehmoment. Dadurch könnte ein Untersetzungsgetriebe entfallen. Ein Motor mit variabler Reluktanz, der sich in diskreten Schritten bewegen, stoppen und starten soll, ist ein Schrittmotor mit variabler Reluktanz
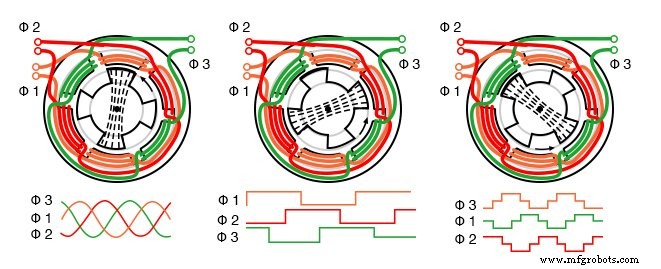
Wenn eine gleichmäßige Rotation das Ziel ist, gibt es eine elektronisch angetriebene Version des geschalteten Reluktanzmotors. Motoren mit variabler Reluktanz oder Schrittmotoren verwenden tatsächlich Rotoren wie die in Abbildung unten.
Elektronisch angetriebener Motor mit variabler Reluktanz
Motoren mit variabler Reluktanz haben eine schlechte Leistung, wenn die direkte Stromleitung angetrieben wird. Mikroprozessoren und Solid-State-Power-Drive machen diesen Motor jedoch zu einer wirtschaftlichen Hochleistungslösung in einigen Anwendungen mit hohem Volumen.
Obwohl er schwer zu kontrollieren ist, lässt sich dieser Motor leicht drehen. Das sequentielle Schalten der Feldspulen erzeugt ein rotierendes Magnetfeld, das den unregelmäßig geformten Rotor mit sich herumschleppt, während er den Weg mit dem niedrigsten magnetischen Widerstand sucht.
Die Beziehung zwischen Drehmoment und Statorstrom ist stark nichtlinear – schwer zu kontrollieren.
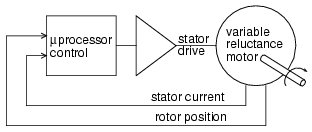
Elektronisch angetriebener Motor mit variabler Reluktanz
Ein elektronisch angetriebener Motor mit variabler Reluktanz (Abbildung unten) ähnelt einem bürstenlosen Gleichstrommotor ohne Permanentmagnetrotor. Dies macht den Motor einfach und kostengünstig. Dies wird jedoch durch die Kosten der elektronischen Steuerung ausgeglichen, die bei weitem nicht so einfach ist wie bei einem bürstenlosen Gleichstrommotor.
Obwohl der Motor mit variabler Reluktanz einfach ist, noch einfacher als ein Induktionsmotor, ist er schwierig zu steuern. Die elektronische Steuerung löst dieses Problem und macht es praktisch, den Motor deutlich über und unter der Netzfrequenz zu betreiben. Ein Motor mit variabler Reluktanz, der von einem Servo angetrieben wird , ein elektronisches Feedback-System, steuert Drehmoment und Drehzahl und minimiert so die Drehmomentwelligkeit.
Elektronisch angetriebener Motor mit variabler Reluktanz
Dies ist das Gegenteil des bei Schrittmotoren gewünschten hohen Welligkeitsdrehmoments. Anstelle eines Schrittmotors ist ein Motor mit variabler Reluktanz für eine kontinuierliche Hochgeschwindigkeitsdrehung mit minimalem Welligkeitsdrehmoment optimiert.
Es ist erforderlich, die Rotorposition mit einem Drehpositionssensor wie einem optischen oder magnetischen Encoder zu messen oder aus der Überwachung der Stator-Gegen-EMK abzuleiten. Ein Mikroprozessor führt komplexe Berechnungen durch, um die Wicklungen bei Halbleiterbauelementen zum richtigen Zeitpunkt zu schalten.
Dies muss präzise erfolgen, um hörbare Geräusche und Drehmomentschwankungen zu minimieren. Für niedrigstes Welligkeitsdrehmoment muss der Wicklungsstrom überwacht und gesteuert werden.
Die strengen Antriebsanforderungen machen diesen Motor nur für Anwendungen mit hohem Volumen wie energieeffiziente Staubsaugermotoren, Lüftermotoren oder Pumpenmotoren praktikabel. Ein solcher Staubsauger verwendet einen kompakten, hocheffizienten, elektronisch betriebenen Lüftermotor mit 100.000 U/min.
Die Einfachheit des Motors gleicht die Kosten für die Antriebselektronik aus. Keine Bürsten, kein Kommutator, keine Rotorwicklungen, keine Permanentmagnete, vereinfacht die Motorherstellung.
Der Wirkungsgrad dieses elektronisch angetriebenen Motors kann hoch sein. Dies erfordert jedoch eine erhebliche Optimierung unter Verwendung spezieller Konstruktionstechniken, die nur für große Produktionsmengen gerechtfertigt ist.
Vorteile
- Einfache Konstruktion – keine Bürsten, Kommutatoren oder Permanentmagnete, kein Kupfer oder Aluminium im Rotor.
- Hohe Effizienz und Zuverlässigkeit im Vergleich zu herkömmlichen AC- oder DC-Motoren.
- Hohes Anlaufdrehmoment.
- Kostengünstig im Vergleich zum bürstenlosen Gleichstrommotor bei hohen Stückzahlen.
- Anpassbar an sehr hohe Umgebungstemperaturen.
- Kostengünstige genaue Geschwindigkeitsregelung möglich, wenn die Lautstärke hoch genug ist.
Nachteile
- Strom versus Drehmoment ist stark nichtlinear
- Phasenumschaltung muss präzise sein, um das Welligkeitsdrehmoment zu minimieren
- Phasenstrom muss gesteuert werden, um das Welligkeitsdrehmoment zu minimieren
- Akustisches und elektrisches Rauschen
- Aufgrund komplexer Kontrollprobleme nicht auf geringe Mengen anwendbar
Industrietechnik