


Andere Spezialmotoren
Induktionsmotor mit abgeschirmtem Pol
Eine einfache Möglichkeit, einem Einphasenmotor ein Anlaufdrehmoment bereitzustellen, besteht darin, in jeden Pol eine kurzgeschlossene Windung von 30° bis 60° zur Hauptwicklung einzubetten. (Abbildung unten) Normalerweise ist 1/3 des Pols von einem blanken Kupferband umgeben.
Diese Abschattungsspulen erzeugen einen zeitverzögerten gedämpften Fluss, der 30° bis 60° vom Hauptfeld beabstandet ist. Dieser nacheilende Fluss mit der ungedämpften Hauptkomponente erzeugt ein Drehfeld mit einem kleinen Drehmoment zum Starten des Rotors.
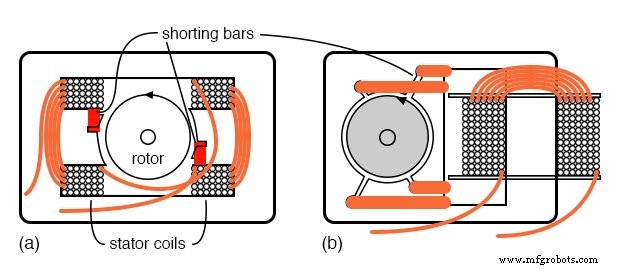
Induktionsmotor mit Spaltpol, (a) Doppelspulen-Design, (b) kleinere Einzelspulen-Version
Das Anlaufdrehmoment ist so gering, dass Spaltpolmotoren nur in kleineren Baugrößen unter 50 Watt gefertigt werden. Niedrige Kosten und Einfachheit eignen sich für diesen Motor für kleine Lüfter, Luftumwälzer und andere Anwendungen mit niedrigem Drehmoment. Die Motordrehzahl kann gesenkt werden, indem die Reaktanz in Reihe geschaltet wird, um Strom und Drehmoment zu begrenzen, oder durch Umschalten der Motorspulenabgriffe.
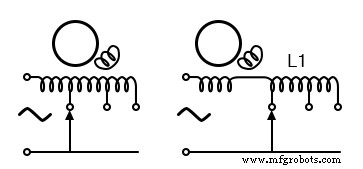
Drehzahlregelung des Spaltpolmotors
2-Phasen-Servomotor
Ein Servomotor ist normalerweise Teil einer Rückkopplungsschleife, die elektronische, mechanische und elektrische Komponenten enthält. Die Servoschleife ist ein Mittel, um die Bewegung eines Objekts über den Motor zu steuern. Eine Anforderung vieler solcher Systeme ist eine schnelle Reaktion.
Um die Beschleunigung raubender Trägheit zu reduzieren, wird der Eisenkern aus dem Rotor entfernt, so dass nur ein auf der Welle montierter Aluminiumtopf zum Rotieren bleibt. Der Eisenkern wird als statische (nicht rotierende) Komponente wieder in den Becher eingesetzt, um den Magnetkreis zu schließen.
Ansonsten ist der Aufbau typisch für einen Zweiphasenmotor. Der Rotor mit geringer Masse kann schneller beschleunigen als ein Käfigläufer.

Hochbeschleunigter 2-φ AC-Servomotor
Eine Phase ist an die einphasige Leitung angeschlossen; der andere wird von einem Verstärker angesteuert. Eine der Wicklungen wird von einem 90° . angetrieben phasenverschobene Wellenform. In der obigen Abbildung wird dies durch einen Reihenkondensator in der Stromleitungswicklung erreicht.
Die andere Wicklung wird von einer Sinuswelle mit variabler Amplitude angetrieben, um die Motordrehzahl zu steuern. Die Phase der Wellenform kann invertieren (180° Phasenverschiebung), um die Drehrichtung des Motors umzukehren. Diese variable Sinuswelle ist der Ausgang eines Fehlerverstärkers.
Siehe Synchro-CT-Abschnitt zum Beispiel. Flugzeugsteuerflächen können mit 400 Hz 2-φ-Servomotoren positioniert werden.
Hysteresemotor
Wenn der laminierte Rotor aus Si-Stahl mit geringer Hysterese eines Induktionsmotors durch einen nutenlosen, wicklungslosen Zylinder aus gehärtetem Magnetstahl ersetzt wird, wird die Hysterese oder das Nacheilen der Rotormagnetisierung stark akzentuiert.
Der resultierende Synchronmotor mit niedrigem Drehmoment entwickelt ein konstantes Drehmoment vom Stillstand bis zur Synchrondrehzahl. Aufgrund des geringen Drehmoments ist der Hysteresemotor nur in sehr kleinen Größen erhältlich und wird nur für Anwendungen mit konstanter Geschwindigkeit wie Uhrenantriebe und früher Plattenspieler verwendet.
Wirbelstromkupplung
Wird der Stator eines Induktionsmotors oder eines Synchronmotors unabhängig vom Rotor drehbar gelagert, entsteht eine Wirbelstromkupplung. Die Spulen werden mit Gleichstrom erregt und mit der mechanischen Last verbunden.
Der Käfigläufer ist am Antriebsmotor befestigt. Der Antriebsmotor wird ohne Gleichstromerregung der Kupplung gestartet. Die Gleichstromerregung wird von Null auf den gewünschten Endwert eingestellt und bietet ein stufenlos und stufenlos regelbares Drehmoment.
Die Funktionsweise der Wirbelstromkupplung ähnelt einem analogen Wirbelstrom-Automobiltacho.
Zusammenfassung:Andere spezialisierte Motoren
- Der Schattenpol-Induktionsmotor , das in Anwendungen mit niedrigem Drehmoment unter 50 Watt verwendet wird, entwickelt eine zweite Phase aus kurzgeschlossenen Windungen im Stator.
- Hysteresemotoren sind kleine Synchronmotoren mit niedrigem Drehmoment, die einst in Uhren und Phonographen verwendet wurden.
- Die Wirbelstromkupplung bietet ein einstellbares Drehmoment.
Industrietechnik
- Einphasen-Asynchronmotoren
- AC-Kommutatormotoren
- Entwicklung von Motorsteuerungen für Robotersysteme
- Technischer Tipp:Motoren
- Überdimensionierte Elektromotoren:Sollten sie ersetzt werden?
- Elektromotorsicherheit:Verschiedene Phasen und Sicherheitsmaßnahmen
- 4 Hauptarten von Wicklungsfehlern bei AC-Elektromotoren
- Über Industriemotoren und Anwendungen
- Eine Einführung in den BLDC-Motor
- 5 Gründe, warum TEFC-Motoren ausfallen