


Schrittmotor vs. Gleichstrommotor – wie sind sie unterschiedlich
Elektromotoren sind wesentliche Komponenten bei der Umwandlung elektrischer Energie in mechanische Energie. Obwohl alle Motoren die gleiche Funktion erfüllen, ist die Wahl des richtigen Motors praktisch, um ein maximales Drehmoment zu liefern. Daher werden wir in diesem Artikel zwischen dem Schrittmotor und dem Gleichstrommotor unterscheiden. Außerdem werden wir die kritischen Eigenschaften von Servomotoren identifizieren.
Schrittmotor
Abb. 1:Ein Schrittmotor
Definition
In erster Linie handelt es sich um einen bürstenlosen Gleichstrommotor, der sich in diskreten Schritten dreht.
Mit computergesteuertem Stepping ist es außerdem möglich, eine äußerst präzise Geschwindigkeitssteuerung und Positionierung zu realisieren. Daher sind Schrittmotoren bei Präzisionsbewegungssteuerungsanwendungen beliebt.
Komponente
Es verfügt über mehrere gezahnte Elektromagnete, die ein zentrales Zahnrad umgeben. Diese Anordnung ist beim Definieren der Position praktisch. Außerdem verwendet ein Permanentmagnet-Schrittmotor Gleichstrom. Trotzdem fehlen die Bürsten und der mechanische Kommutator, der für Gleichstrommotoren gleichbedeutend ist. Daher ist es ein bürstenloser Gleichstrommotor.
Arbeitsprinzip
Der Motor verfügt über ein Steuersystem, das dafür verantwortlich ist, elektrische Impulse an einen Fahrer zu senden. Anschließend entschlüsselt der Fahrer die Impulse. Dieser wiederum überträgt eine proportionale Spannung zurück zum Motor.
Als nächstes dreht sich der Motor in festen Winkelschritten. Daraus leitet sich der Name Schrittmotor ab. Beachten Sie auch, dass ein Wechselstrom die Polarität der Spulen steuert.
Vorteile und Einschränkungen
Zu den Vorteilen des Schrittmotors gehören:

Abb. 2:Ein Metall-3D-Drucker
- Erstens sind sie praktisch, um präzise Positionierungsanwendungen wie in X-, Y-Plottern und 3D-Druckern zu erleichtern.
- Außerdem ermöglichen sie eine genaue Steuerung der Rotationsgeschwindigkeit.
- Drittens zeichnen sie sich durch ein geringes Drehmoment bei niedrigen Drehzahlen aus.
- Zu guter Letzt sind sie einfach zu kontrollieren.
Zu ihren grundlegenden Einschränkungen gehören
- Die Motoren haben einen geringen Wirkungsgrad. Ohne Last ziehen sie am meisten Strom.
- Außerdem ist bei hoher Motordrehzahl ihr Drehmoment im Vergleich zu niedrigen Drehzahlen deutlich niedriger.
- Und den meisten fehlt ein integrales Feedback zur Position. Sie sind während des Gebrauchs relativ laut.
- Zu guter Letzt können sie bei hoher Belastung einige Schritte überspringen.
Anwendungen
- 3D-Drucker
- Medizinische Bildgebungsanwendungen
- Sicherheitskameras
- Robotik
- CNC-Fräsmaschinen
Servomotor

Abb. 3:3D-Darstellung eines Servomotors
Definition
Er gehört zu den Gleichstrommotoren. Trotzdem läuft dieser Synchronmotor nicht dauerhaft über einen längeren Zeitraum.
Komponente
In erster Linie stützt sich dieser Motor auf ein Rückkopplungssystem, um den Unterschied zwischen der tatsächlichen und der gewünschten Geschwindigkeit zu erfassen. Somit erleichtert die Rückkopplung die Anpassung der Ausgabe beim Korrigieren einer Abweichung von der gewünschten Position. Es ist praktisch, um die genaue Positionierung zu verbessern.
Es gibt zwei Arten von Servos, nämlich:
Motorservos mit kontinuierlicher Drehung
Sie können sich kontinuierlich entweder im Uhrzeigersinn oder gegen den Uhrzeigersinn drehen. Außerdem können sie sich je nach Befehlssignal in unterschiedlichen Geschwindigkeitsbereichen bewegen. Daher sind sie für einen breiteren Anwendungsbereich als Positionsmotoren geeignet.
Positionsrotationsservos
Sie sind praktisch in kleinen Projekten, um eine mäßig präzise Positionierung zu erreichen. Außerdem drehen sie sich in einem 180-Grad-Winkel und helfen nicht bei der kontinuierlichen Drehung und Geschwindigkeitskontrolle.
Arbeitsprinzip

Abb. 4:Ein Servomotor
Das innere Motordesign zeichnet sich durch eine einzigartige Anordnung der Zahnräder aus, die praktisch ist, um die hohe Geschwindigkeit der internen Motoren zu mildern. Gleichzeitig steigt das abgegebene Drehmoment deutlich an.
Daher sind das Getriebedesign und die Drehzahl des Servos unerlässlich, um ein hohes Drehmoment zu erzeugen. Bemerkenswert ist auch, dass das Servo über einen Mikrocontroller verfügt, der bei der Behebung des Fehlersignals hilfreich ist. Diese Steuersignale helfen dabei, den Rotor in die Endposition zu bewegen.
Schrittmotor vs. Gleichstrommotor – Vorteile und Einschränkungen
Vorteile von Servomotoren
- Sie haben ein hohes Drehmoment, wenn sie sich mit hohen Drehzahlen drehen. Dies liegt in erster Linie an ihrem Closed-Loop-Feedback-Steuerungssystem, das besser ist als das Open-Loop-System des Schrittmotors.
- Außerdem sind sie in einer Vielzahl von Drehmomentwerten und Größen erhältlich
- Zu guter Letzt sind sie relativ billig, da einige aus Kunststoff hergestellt sind, was sie auch leicht macht.
Nachteile von Servomotoren
- Positionsmotoren haben eine Rotationsbegrenzung. Sie können nur in einem Winkel von 180 Grad gedreht werden.
- Außerdem sind sie gleichbedeutend mit Zuckungen während der Positionskontrolle. In erster Linie liegt es an dem Rückkopplungsmechanismus, der versucht, jede Verschiebung von der beabsichtigten Position zu korrigieren.
Anwendungen
- Aufzugstechnik und Robotik
- Teleskope und Kameras
- Industrielle Steuerungsanwendungen
Schrittmotor vs. Gleichstrommotor – Gleichstrommotoren

Bild 5:Zahlreiche DC-Motoren
Definition
Sie sind Geräte mit einer elektromagnetischen Spule und Leitern, deren Wechselwirkungen elektrische Energie in mechanische Energie umwandeln. Die beiden gängigen DC-Motortypen umfassen bürstenlose Motoren und Bürstenmotoren. Außerdem gibt es verschiedene DC-Motorgrößen.
Komponente
Bemerkenswert ist, dass der Name gebürstet von den beiden stationären Metallbürsten stammt, die den Wicklungsstrom für den Motor liefern. Die anderen Hauptkomponenten umfassen den statischen Stator und den rotierenden Anker
Schrittmotor vs. Gleichstrommotor – Funktionsprinzip
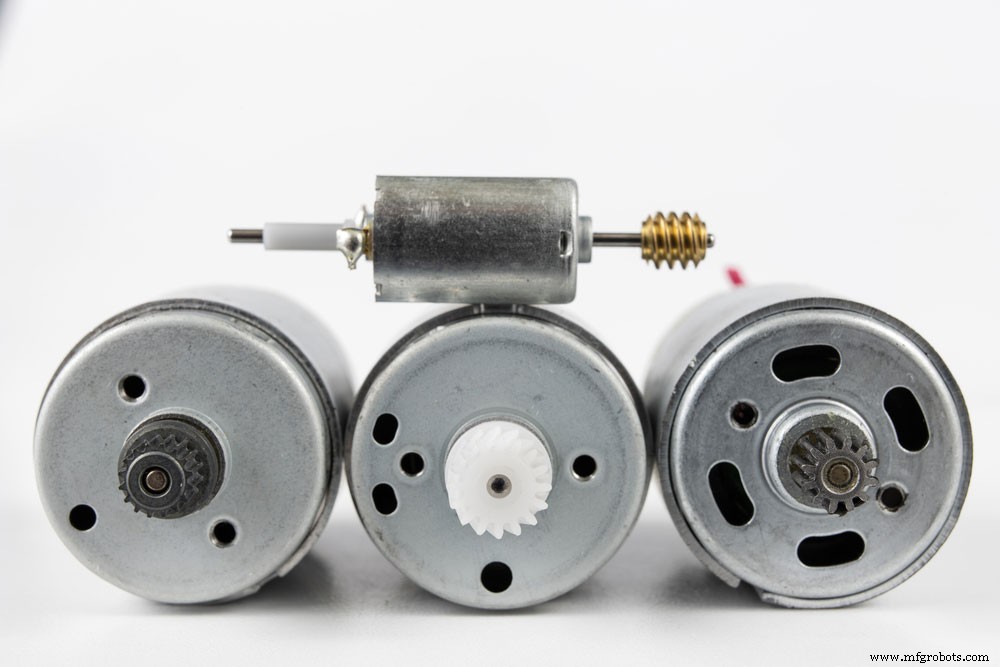
Abb. 6:Gleichstrommotoren
Der Stator gibt das rotierende Magnetfeld ab, das die Drehung des Ankers veranlasst. Außerdem ist ein Magnetpaar praktisch, um die elektromagnetischen Spulen einzuhüllen, indem es die Spulen umgibt. Wenn also der Wicklungsstrom im Draht durch ein Magnetfeld fließt, induziert er eine Kraft. Dies wiederum leitet die Drehung der Spulen ein.
Schrittmotor vs. DC-Motor – Vorteile und Einschränkungen von DC-Bürstenmotoren
Vorteile
- Sie sind einfach zu steuern, da man lediglich eine Spannung anlegen muss.
- Zweitens liefern sie ein hohes Drehmoment bei relativ niedrigen Drehzahlen. Zudem ist ihre mechanische Leistungserzeugung mit einem Wirkungsgrad von ca. 75 bis 80 % hoch.
- Sie sind relativ günstig und damit erschwinglich.
Nachteile
- Sie sind anfällig für elektromagnetisches Rauschen und physikalisches Rauschen während der Drehung.
- Außerdem müssen die Motoren regelmäßig gewartet werden, da die Abnutzungsrate der Bürsten sehr hoch ist.
Anwendungen
- Akku-Bohrschrauber
- Industrielle Anwendungen
- Handy-Vibratoren
- Handventilatoren
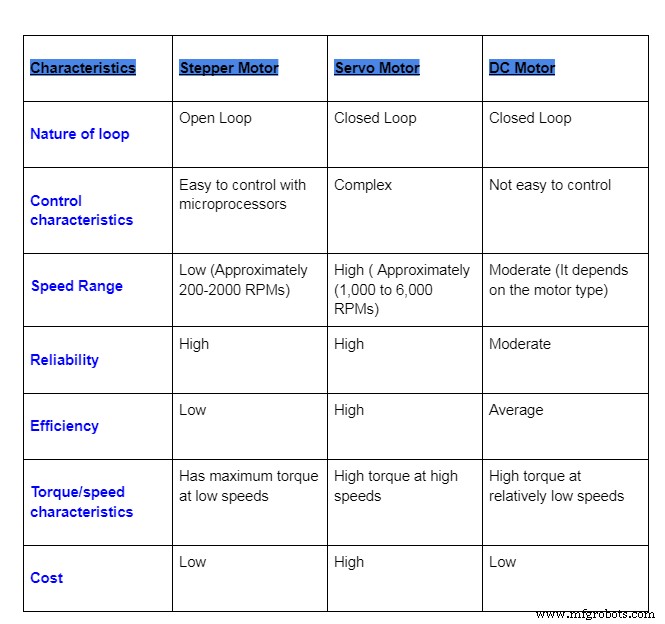
Der Unterschied zwischen Schrittmotor vs. Servomotor vs. Gleichstrommotor
Schlussfolgerung
Kurz gesagt, diese drei Motoren eignen sich für unterschiedliche Funktionen, wie wir ausgeführt haben. Jetzt kennen Sie alle wichtigen Unterschiede zwischen den drei Motortypen. Wenn Sie jedoch weitere Klarstellungen wünschen, sprechen Sie mit uns.
Industrietechnik