


Was ist ein Autofahrer und wie wählt man den richtigen aus?
Was ist ein Motorfahrer? Wenn Sie einen Motor mit Ihrem Arduino steuern möchten, müssen Sie einen Motortreiber verwenden. Aber was ist ein Motortreiber und wie wählt man den richtigen aus?
In diesem Artikel beantworten wir diese Fragen und mehr! Wir besprechen, welche Arten von Motortreibern verfügbar sind, was jeder Typ kann und wie Sie den richtigen für Ihr Projekt auswählen. Lesen Sie also weiter, um alles zu erfahren, was Sie über Motortreiber wissen müssen!
Was ist der Motortreiber?

Bldc-Planetengetriebemotor
Ein Motortreiber ist ein elektronisches Gerät, das die Geschwindigkeit und Richtung eines Elektromotors steuert. Sie können Motortreiber verwenden, um kleine Motoren wie Spielzeug, ferngesteuerte Autos oder Roboter zu steuern. Sie können damit auch größere Motoren in industriellen Anwendungen steuern.
Ist ein Motortreiber notwendig?
Der Hauptgrund für die Verwendung eines Motortreibers besteht darin, den Mikrocontroller vor den großen Strömen zu schützen, die zum Antreiben eines Motors erforderlich sind. Wenn Sie versuchen würden, einen Motor direkt an einen Mikrocontroller anzuschließen, würde der durch den Mikrocontroller fließende Strom ihn beschädigen.
Der andere Grund für die Verwendung eines Motortreibers ist, dass er mehr Leistung liefern kann als der Mikrocontroller. Daher ist dies nützlich für Anwendungen, bei denen Sie schwere Lasten bewegen oder Motoren antreiben müssen, die viel Leistung benötigen.
Wie arbeitet ein Motorfahrer?
Ein Motortreiber-IC ist ein Leistungsverstärker. Außerdem nimmt es ein Signal mit geringer Leistung vom Mikrocontroller und verstärkt es, um genügend Leistung zum Antreiben des Motors bereitzustellen.
Darüber hinaus verfügen die meisten Motortreiber auch über einen eingebauten Schutz gegen Dinge wie Überstrom und Übertemperatur. Dies schützt sowohl den Mikrocontroller als auch den Motortreiber selbst.
So stoppen Sie den Motor (Bremsen)
Wenn Sie den Motor stoppen möchten, haben Sie zwei Möglichkeiten:
– Ausrollen:
Dies ist, wenn Sie die Stromversorgung vom Motor trennen. Der Nachteil ist, dass sich der Motor noch eine Weile dreht und sich selbst oder das, woran er befestigt ist, beschädigen könnte.
– Bremsen:
Dies ist, wenn Sie den Motor in der entgegengesetzten Richtung mit Strom versorgen. Dadurch stoppt der Motor fast sofort.
Der Nachteil dabei ist jedoch, dass es den Motor stark belasten und beschädigen kann.
Welche Sie wählen, hängt von Ihrer Anwendung ab. Wenn Sie den Motor schnell stoppen müssen, sollten Sie bremsen. Wenn es Ihnen nichts ausmacht, dass sich der Motor eine Weile dreht, nachdem Sie die Stromversorgung unterbrochen haben, können Sie den Freilauf verwenden.
Man kann es sich so vorstellen:Wenn Sie mit dem Fahrrad einen Hügel hinunterfahren, möchten Sie im Leerlauf fahren. Aber wenn Sie mit dem Fahrrad einen Hügel hinauffahren, möchten Sie wahrscheinlich bremsen.
Eine andere Sache, die Sie berücksichtigen sollten, ist, welche Art von Motor Sie verwenden. Wenn Sie einen bürstenbehafteten Gleichstrommotor verwenden, benötigen Sie einen Motortreiber, der die hohen Ströme verarbeiten kann, die diese Motoren erfordern. Wenn Sie einen Schrittmotor verwenden, benötigen Sie einen Motortreiber, der Mikroschritte ausführen kann.
Arten von Motortreibern
Es gibt zwei Haupttypen von Motortreibern:gebürstet und bürstenlos.
Bürstenmotortreiber sind typischerweise für Anwendungen mit geringerer Leistung wie RC-Spielzeug geeignet. Außerdem sind sie einfacher zu verwenden, da sie keine speziellen Sensoren oder Controller benötigen.
Bürstenlose Motortreiber sind für Anwendungen mit höherer Leistung wie Drohnen und Elektrofahrzeuge üblich. Außerdem sind sie komplexer in der Anwendung, da sie spezielle Sensoren und Steuerungen erfordern.
Neben gebürsteten und bürstenlosen haben wir auch die folgenden Typen:
DC-Motortreiber
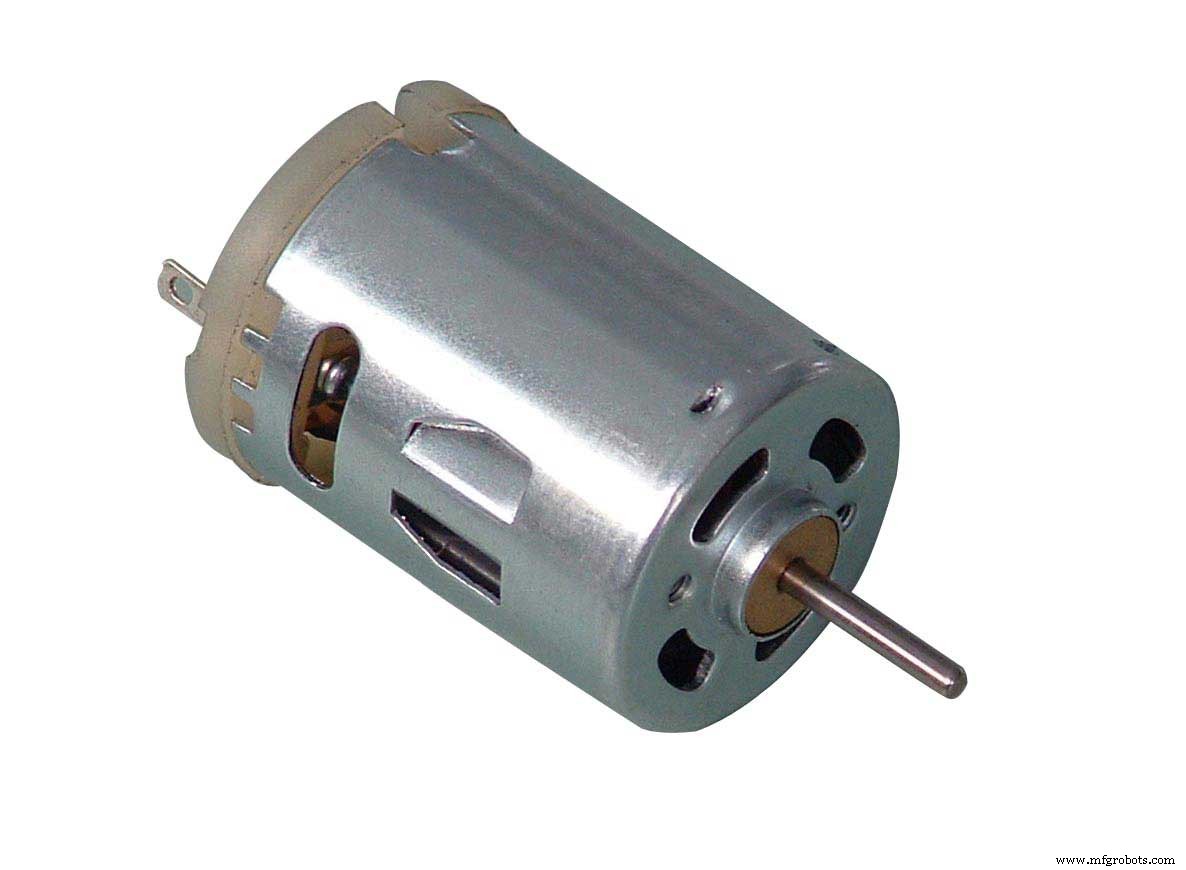
Gleichstrommotor
Quelle:Wikimedia Commons
Gleichstrommotoren sind die am weitesten verbreitete Art von Motoren. Sie sind in allen Bereichen verbreitet, von Lüftern bis hin zu Festplatten. Darüber hinaus können Sie Gleichstrommotoren verwenden, um die Geschwindigkeit und Richtung zu steuern.
Servomotortreiber

ServoDrive
Quelle:Wikimedia Commons
Servomotoren sind in Anwendungen anwendbar, die eine präzise Steuerung erfordern, wie z. B. Roboter und CNC-Maschinen.
Darüber hinaus könnten Sie den Servomotor verwenden, um seine Position, Geschwindigkeit und sein Drehmoment zu steuern.
Schrittmotortreiber
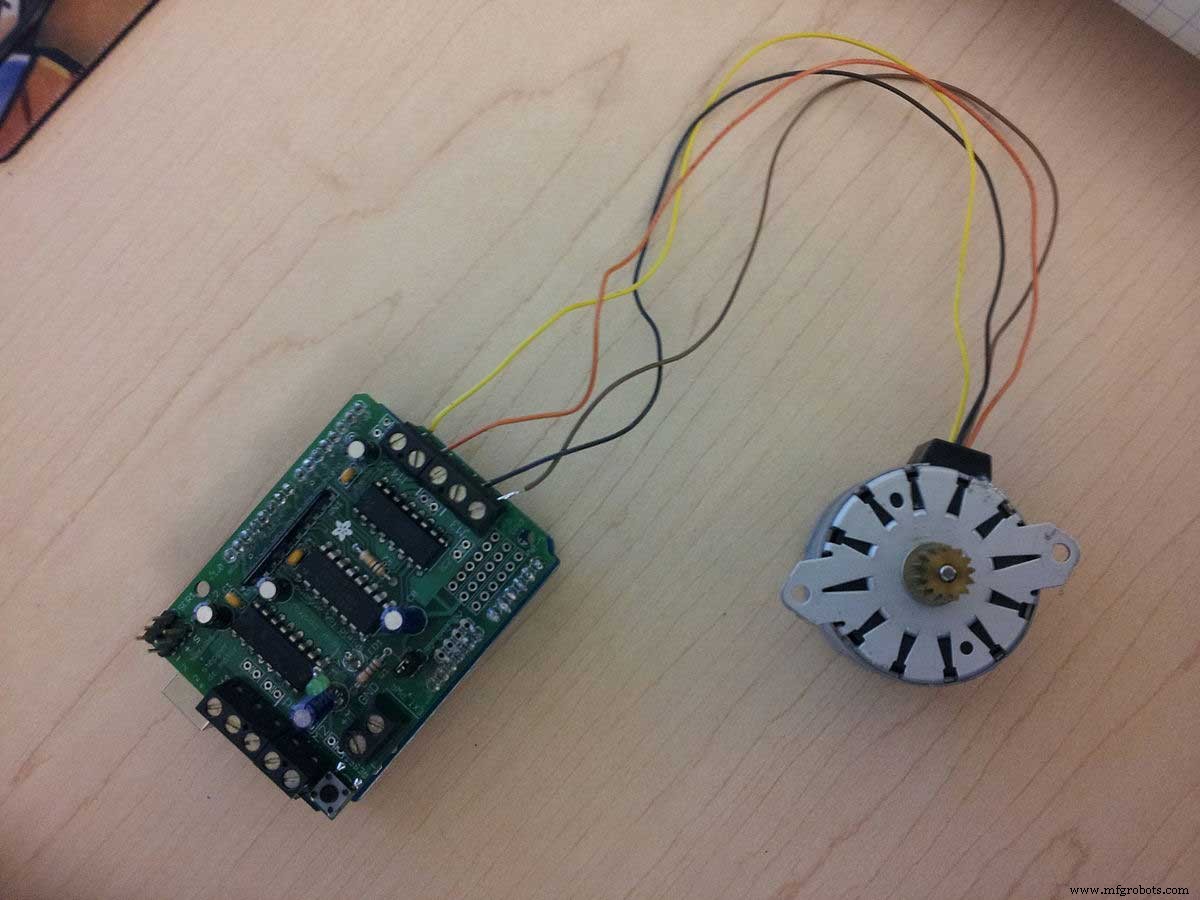
Schrittmotor
Quelle:Wikimedia Commons
Ein Schrittmotortreiber ist eine Art Elektromotor, der elektrische Energie in mechanische Energie umwandelt. Und Sie können sie verwenden, um die Geschwindigkeit und Richtung zu steuern.
Darüber hinaus sind sie in Anwendungen anwendbar, die eine präzise Positionierung erfordern, wie z. B. Drucker und Scanner. Sie können sie auch verwenden, um die Schrittrate und -richtung zu steuern.
Andere Typen:
Neben den oben genannten Typen gibt es auch andere Arten von Elektromotoren, wie zum Beispiel
Digitaler Schrittmotortreiber
Digital Stepper Driver ist ein Motortreiber, der digitale Signale zur Steuerung des Schrittmotors verwendet.
Stepper-Treiber mit geschlossenem Regelkreis
Ein Schrittmotortreiber mit geschlossenem Regelkreis ist eine Art Motortreiber, der Feedback verwendet, um den Schrittmotor zu steuern.
Analoger Schrittmotortreiber
Der analoge Schrittmotortreiber ist eine Art Motortreiber, der analoge Signale zur Steuerung verwendet.
Integrierter Stepper-Treiber
Ein integrierter Motortreiber ist eine Art Motortreiber, der die Merkmale eines Motortreibers und eines Mikrocontrollers kombiniert. Und diese Art von Motortreiber ist häufig in Robotikanwendungen anwendbar.
BLDC-Motortreiber
BLDC-Motoren sind bürstenlose Gleichstrommotoren. Und sie sind üblich in Anwendungen, die ein hohes Drehmoment und geringe Geräuschentwicklung erfordern, wie Computerfestplatten und Elektrofahrzeuge.
BLDC-Motorfahrer gewöhnen sich daran, Geschwindigkeit und Richtung zu steuern.
DC-Motortreiberschaltung
In diesem Abschnitt lernen wir einige DC-Motortreiberschaltungen kennen.
DC-Motortreiberschaltung mit Transistoren
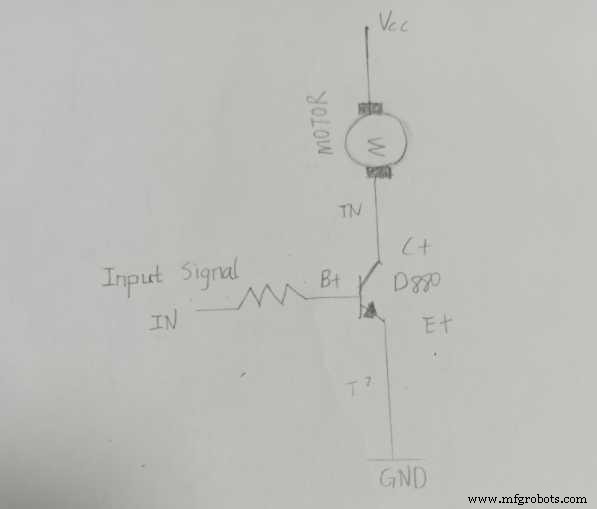
DC-Motortreiberschaltung
Dies ist eine grundlegende DC-Motortreiberschaltung. Darüber hinaus arbeitet es mit einem Gleichstrommotor, einem Widerstand und einem Leistungstransistor (D880).
H-Brückenschaltung
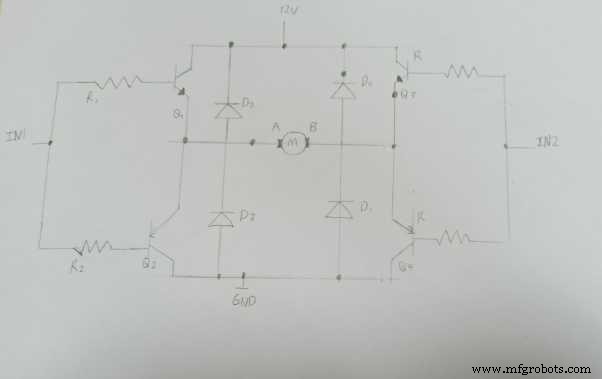
H-Brückenschaltung
Die H-Brückenschaltung soll die Geschwindigkeit und Richtung eines Gleichstrommotors steuern. Darüber hinaus können Sie diese Schaltung in Anwendungen verwenden, bei denen der Gleichstrommotor in beide Richtungen angetrieben werden muss.
Darüber hinaus können Sie es in Roboteranwendungen verwenden. Zum Beispiel die Richtung eines Roboters ändern.
Motortreiber-IC
Ein Motortreiber-IC ist ein spezialisierter IC, mit dem Sie Motoren steuern können. Außerdem können Motortreiber-ICs nützlich sein, um Gleichstrommotoren, Servomotoren und Schrittmotoren zu steuern.
Die häufigsten Motortreiber-ICs sind wie folgt:
– L293D
L293D ist eine Art H-Brücken-Treiber-IC. Und Sie können es verwenden, um induktive Lasten wie Relais, Solenoide, Gleichstrom, bipolare Schrittmotoren usw. zu treiben.
– L298N
L298N ist auch eine Art H-Brücken-Treiber-IC. Außerdem wird es verwendet, um Gleichstrommotoren, Schrittmotoren und Aktuatoren anzutreiben.
– A4988
– DRV8825
DRV8825 ist ein Mikroschritt-Treiber-IC mit einem eingebauten Umsetzer für eine einfache Bedienung. Darüber hinaus könnten Sie DRV8825 verwenden, um bipolare Schrittmotoren anzutreiben.
Motortreiberfunktion
Die Funktionen von Motortreiber-ICs umfassen:
– Stromversorgung des Motors
– Steuerung der Geschwindigkeit und Drehrichtung des Motors
– Abbremsen des Motors
– Schutz des Motors vor Schäden durch zu hohen Strom
– Bereitstellen einer Strombegrenzungsfunktion
Anwendungen von Motorfahrern
Nachdem wir nun wissen, was Motortreiber sind und was sie tun, schauen wir uns einige der häufigsten Anwendungen an.
Eine der häufigsten Anwendungen sind ferngesteuerte Spielzeuge. Der Motortreiber verstärkt das Signal vom Mikrocontroller, damit dieser die Motoren im Spielzeug steuern kann.
Eine weitere häufige Anwendung sind Festplattenlaufwerke. Der Motortreiber steuert hier den Spindelmotor, der die Platten dreht.

Computerlaufwerke verschiedener Typen
In Druckern steuert der Motortreiber sowohl die Vorschubmotoren als auch den Druckkopfwagenmotor.
Und schließlich steuert der Motortreiber in automatisierten Montagemaschinen wieder eine Vielzahl von Motoren, darunter Förderbandmotoren und Greifarmmotoren.
Vorteile von Motortreiber-ICs
Die folgenden Vorteile sind:
– Erstens kann er mehr Leistung liefern als der Mikrocontroller.
– Dann hat es einen eingebauten Schutz gegen Dinge wie Überstrom und Übertemperatur.
– Schließlich spart es Platz, weil es sowohl den Verstärker als auch den Motortreiber in einem IC kombiniert.
Nachteile von Motortreiber-ICs:
– Erstens können sie teuer sein.
– Außerdem müssen Sie auf die Spannungs- und Stromwerte achten.
– Darüber hinaus können einige ICs schwierig zu verwenden sein.
Nachdem Sie nun wissen, was ein Motortreiber ist, müssen Sie den richtigen für Ihr Projekt auswählen. Dies kann schwierig sein, da es so viele verschiedene Arten von Motortreibern gibt.
So wählen Sie den richtigen Motortreiber aus
Die folgenden wichtigen Faktoren sind bei der Auswahl eines Motortreibers zu berücksichtigen:
– die Art der Motoren, die Sie verwenden (gebürstet oder bürstenlos)
Zuerst müssen Sie bestätigen, ob Sie bürstenbehaftete oder bürstenlose Motoren verwenden.
Wenn Sie sich nicht sicher sind, welcher Motortyp verwendet wird, werfen Sie einen Blick in das Datenblatt.
– die Spannung Ihrer Motoren
Bei der Auswahl eines Motortreibers ist es wichtig, die Nennspannung, den Logikpegel sowie die Merkmale und Fähigkeiten zu berücksichtigen.
Wählen Sie einen Motortreiber, der für die Spannung Ihres Motors ausgelegt ist, mit dem Logikpegel Ihres Mikrocontrollers umgehen kann und über die Funktionen und Fähigkeiten verfügt, die Sie benötigen.
Wenn es um Spannung geht, können die meisten Motortreiber mit einer Reihe von Spannungen umgehen. Beispielsweise kann der L293D Spannungen zwischen +36 V und -36 V verarbeiten. Es ist jedoch wichtig sicherzustellen, dass die verwendete Spannung innerhalb der angegebenen Grenzen des Motortreibers liegt. Wenn Sie die maximale Spannung überschreiten, können Sie den Motortreiber beschädigen.
Die Nennspannung des Motortreibers ist wichtig. Die meisten Motortreiber können bei Spannungen zwischen etwa 0,65 V und 36 V betrieben werden.
Die Merkmale und Fähigkeiten des Motortreibers sind ebenfalls wichtig. Wählen Sie also einen Motortreiber, der über die Funktionen und Fähigkeiten verfügt, die Sie für Ihre Anwendung benötigen.
– die aktuelle Nennleistung Ihrer Motoren
Es ist wichtig, einen Motortreiber zu wählen, der die Strommenge bewältigen kann, die Ihre Motoren ziehen werden. Wenn Sie einen Treiber wählen, der nicht stark genug ist, wird er überhitzen und möglicherweise Ihren Motor beschädigen. Wenn Sie einen zu leistungsstarken Treiber wählen, verschwenden Sie Geld für überzählige Funktionen, die Sie nie verwenden werden.
Dies ist die Strommenge, die der Motortreiber den Motoren zur Verfügung stellen kann. Wenn Sie große Motoren verwenden, die viel Strom benötigen, müssen Sie einen Motortreiber mit hoher Stromstärke verwenden. Der L293D kann beispielsweise bis zu 600 mA pro Kanal liefern.
-Schnittstelle
Bei der Auswahl eines Motortreibers müssen Sie auch die Steuerschnittstelle berücksichtigen. Im Vergleich dazu ist die häufigste Schnittstelle eine H-Brücke. Mit dieser Art von Schnittstelle können Sie die Richtung und Geschwindigkeit der Motoren steuern.
Andere Schnittstellen umfassen L293D, L298N und TB6612FNG. Diese Schnittstellen bieten unterschiedliche Funktionen und Möglichkeiten.
Wenn Sie einen Motortreiber mit einem Mikrocontroller verwenden, müssen Sie auch den Logikpegel der Schnittstelle berücksichtigen. Die meisten Mikrocontroller verwenden TTL-Logik, die mit vielen Motortreibern nicht kompatibel ist.
Sie müssen einen Logikpegelwandler verwenden, wenn Sie einen TTL-Mikrocontroller mit Motortreibern verwenden möchten.
– das benötigte Drehmoment
Während Sie auch das Drehmoment berücksichtigen müssen, müssen Sie sich das Stillstandsdrehmoment ansehen. Dies ist das Drehmoment, das erforderlich ist, damit sich der Motor nicht bewegt.
Das Haltemoment ist das, was Sie brauchen, um den Widerstand der Last zu überwinden. Wenn Sie eine schwere Last bewegen müssen, benötigen Sie einen Motor mit einem hohen Haltemoment.
– die Geschwindigkeit, mit der sich Ihre Motoren drehen müssen
Außerdem sollte die Drehzahl Ihres Motors berücksichtigt werden. Sie müssen Motortreiber auswählen, die die Leistung liefern, die Sie benötigen, um Ihre Motoren mit der gewünschten Geschwindigkeit zu drehen.
– die Größe und das Gewicht Ihrer Motoren
Dies ist auch eine wichtige Überlegung, da Sie sicherstellen müssen, dass Ihre Motortreiber das Gewicht und die Größe Ihrer Motoren tragen können.
– die Umgebung, in der Ihre Motoren verwendet werden (Innen- oder Außenbereich)
Dies ist wichtig zu berücksichtigen, da unterschiedliche Motortreiber für unterschiedliche Umgebungen ausgelegt sind. Wenn Sie Ihre Motoren im Freien verwenden möchten, benötigen Sie wetterfeste Motortreiber.
– der Geldbetrag, den Sie auszugeben bereit sind
Vergessen Sie bei der Auswahl von Motortreibern nicht, auch den Preis zu berücksichtigen. Wählen Sie Motortreiber, die erschwinglich sind und innerhalb Ihres Budgets liegen.
Bei der Auswahl von Motortreibern müssen Sie die Art der Schnittstelle, die Nennspannung und den Logikpegel berücksichtigen. Darüber hinaus müssen Sie auch die Merkmale und Fähigkeiten der Motortreiber berücksichtigen. Wählen Sie auf jeden Fall den Motortreiber, der für Ihre Anwendung am besten geeignet ist.
Was ist eine H-Brücke?
Die H-Brücke ist eine Art Schalterschaltung, die zwei Transistorpaare als Schalter enthält. Der Rückwärts- und Vorwärtsbetrieb eines Gleichstrommotors wird durch die Schalter gesteuert. Die meisten Controller werden in dieser Form entworfen.
Ebenso dreht sich der Motor beim Einschalten beider Transistoren in eine Richtung. Wenn beide Transistoren ausgeschaltet sind, arbeitet der Motor nicht. Die Transistorpaare können gleichzeitig eingeschaltet sein, ein Paar kann eingeschaltet sein, während das andere ausgeschaltet ist, oder beide können ausgeschaltet sein.
Dadurch dreht sich der Motor in die andere Richtung. Die Geschwindigkeit des Motors wird erhöht oder verringert, indem die Zeit eingestellt wird, die jeder Transistor eingeschaltet ist.
Zusammenfassung
Motortreiber sind ICs, die Schritt- oder Gleichstrommotoren steuern können. Im Gegensatz dazu gibt es viele verschiedene Arten von Motortreibern, von denen jeder seine eigenen Vor- und Nachteile hat. Einige gängige Motortreiber-ICs sind L298N, DRV8825 und TB6612FNG.
Bei der Auswahl eines Motortreibers müssen Sie die Spannungs- und Stromanforderungen Ihres Motors sowie die maximal zulässige Verlustleistung für den Chip berücksichtigen. Darüber hinaus müssen Sie auch sicherstellen, dass der Treiber die erforderliche Schaltfrequenz für Ihren Motor handhaben kann.
Die meisten Standard-MCUs können Hochleistungsmotoren nicht direkt antreiben, daher müssen Sie einen Motortreiber verwenden, wenn Sie einen Hochleistungs-Gleichstrom- oder Schrittmotor steuern möchten.
Industrietechnik
- So wählen Sie die richtigen Nivellierfüße aus
- So wählen Sie die richtigen Schubladenführungen aus
- 3 Arten von Passformen und wie wählt man die richtige aus?
- Was sind die verschiedenen Krantypen und welcher ist der richtige für Sie?
- Was ist ein Verdichter und wie wähle ich den richtigen aus?
- Kran kaufen:So wählen Sie den richtigen aus
- Was ist ein Lagerverwaltungssystem? Ein Blick auf die Vorteile von Lagerverwaltungssystemen und wie Sie das richtige WMS für Ihr Unternehmen auswählen
- Was ist CMMS-Software? Ein Blick auf die CMMS-Software, ihre Vorteile und die Auswahl des besten CMMS-Softwareprogramms
- Wie wählt man den richtigen Fräser und die richtige Programmierung für CNC aus?
- Wie arbeiten CNC-Werkstätten und wie wählen Sie die richtige aus?