


Was ist ein Postprozessor-Editor und wie verwendet man ihn?
Sie verwenden einen simulierten Roboter oder eine CNC-Maschine… aber sie funktioniert nicht richtig. Könnte es an der Zeit sein, einen Postprozessor-Editor zu verwenden?
Was macht ein Postprozessor und warum sollten Sie einen bearbeiten?
Wenn Sie Offline-Programmierung verwenden, ist es sehr wahrscheinlich, dass Sie mit einem Postprozessor interagiert haben. Vielleicht verwenden Sie RoboDK, um einen Roboter für die Roboterbearbeitung oder eine andere Roboteranwendung zu programmieren. Oder vielleicht verwenden Sie ein CAD/CAM-System, das Ihre CNC-Maschinen unterstützt.
Auch wenn Sie sich dessen nicht bewusst sind, verwenden Sie einen Postprozessor, wann immer Sie ein solches System verwenden, um Ihre physischen Maschinen zu programmieren.
Ein Postprozessor ist die Brücke zwischen der simulierten Umgebung und Ihrer physischen Maschine. Es wandelt die simulierten Anweisungen in Code um, den der Roboter verwenden kann.
Aber was ist, wenn Sie wie ändern möchten? generiert das Programm diesen Code? Hier kommt ein Postprozessor-Editor ins Spiel…
Warum sollten Sie einen Postprozessor bearbeiten?
Die meisten Leute werden ihren Postprozessor nie bearbeiten müssen.
Wenn Sie beispielsweise RoboDK verwenden, laden Sie einfach Ihr Robotermodell aus unserer umfangreichen Roboterbibliothek herunter. Wir haben bereits jedes Modell mit einem der über 80 Postprozessoren in RoboDK verknüpft. Immer wenn Sie Ihr simuliertes Programm an den physischen Roboter senden, konvertiert der Postprozessor den Code für Sie „unter der Haube“.
Es gibt jedoch Situationen, in denen Sie Ihren Postprozessor bearbeiten müssen.
Jeder Roboterhersteller verwendet eine eigene proprietäre Programmiersprache, die auf einer eigenen Robotersteuerung läuft. Jeder Controller verfügt über eine Reihe unterschiedlicher Konfigurationsoptionen und Funktionen. Im Postprozessor können Sie all diese benutzerdefinierten Konfigurationsoptionen festlegen.

Zum Beispiel enthalten Techman-Robotersteuerungen eine Sicherheitsoption, um den Benutzer nach einem Passwort zu fragen, bevor er den Roboter neu programmieren kann. Im Postprozessor finden Sie die Optionen zum Aktivieren, Deaktivieren und Festlegen dieses Kennworts. Nicht alle Roboter haben diese Option.
Was ist ein Postprozessor-Editor?
Ein Postprozessor-Editor ist eine spezielle Software, die zum Bearbeiten von Roboter- oder CNC-Postprozessordateien verwendet wird. Dadurch wird die Postprozessorbearbeitung intuitiver als mit einem Standard-Texteditor, der für viele Programmiersysteme die einzige Option ist.
Ein Beispiel für eine solche Software ist der in RoboDK enthaltene Postprozessor-Editor.
RoboDK-Postprozessoren sind in der Programmiersprache Python geschrieben. Für jeden der unterstützten Postprozessoren gibt es eine kompilierte Bibliothek (eine PYC-Datei) und ein bearbeitbares Python-Skript, das alle Konfigurationseigenschaften enthält.
Diese Konfigurationsdateien können mit jedem Standard-Texteditor bearbeitet werden, wenn Sie die volle Kontrolle über die Konfiguration haben möchten. RoboDK bietet jedoch auch einen intuitiveren Postprozessor-Editor. Dadurch können Sie die Parameter Ihres ausgewählten Roboters ändern, ohne sich überhaupt in den Code einmischen zu müssen.
So bearbeiten Sie einen Postprozessor auf einfache Weise
In RoboDK ist die einfachste Möglichkeit, Ihren Postprozessor zu bearbeiten, die Verwendung unseres Postprozessor-Editors. Es enthält Informationen darüber, wann Sie die einzelnen Parameter und empfohlenen Werte am wahrscheinlichsten verwenden werden. Mit diesem Tool decken Sie die überwiegende Mehrheit der Anwendungsfälle für Ihren Roboter ab.
Jeder Postprozessor enthält eine Liste mit Konfigurationseigenschaften. Diese variieren je nach Roboterhersteller.
Einige Postprozessoren enthalten nur sehr wenige Eigenschaften. Beispielsweise enthält der Postprozessor für Mecademic-Roboter nur eine Eigenschaft (den Dateityp der Programmdatei).
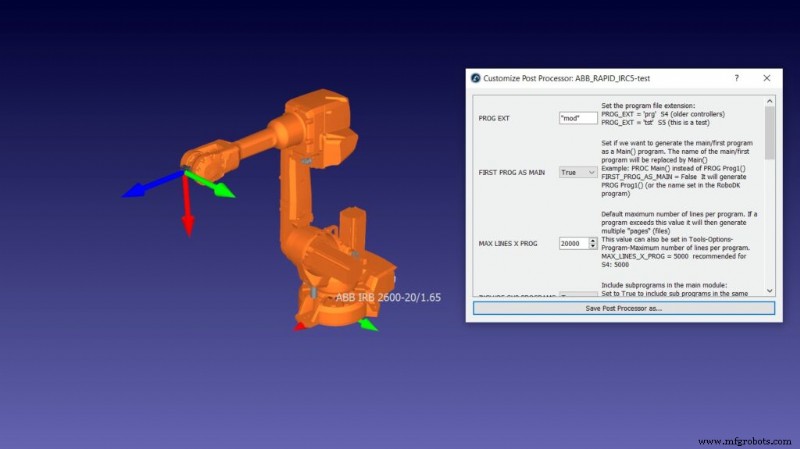
Andere Postprozessoren enthalten viele Eigenschaften. Beispielsweise hat der Postprozessor ABB_RAPID_IRC5 für ABB-Roboter 16 Eigenschaften, die von der Standardgeschwindigkeit des Roboters bis zu Konfigurations-Flags für externe Drehscheiben reichen.
Welchen Roboter Sie auch verwenden, der einfachste Weg, seinen Postprozessor zu bearbeiten, besteht darin, ihn in den RoboDK-Editor zu laden. Sie können alle verfügbaren Konfigurationseigenschaften sehen und entscheiden, welche für Ihre Anwendung am besten geeignet sind.
Das einfache Postprozessor-Bearbeitungshandbuch
Wenn Sie den Postprozessor-Editor öffnen, werden Sie von einer Liste der verfügbaren Eigenschaften begrüßt.
Wie entscheiden Sie, welche Eigenschaften angepasst und welche Werte festgelegt werden sollen?
Lassen Sie uns ein konkretes Beispiel verwenden, um den Prozess zu zeigen … Wir werden uns den Postprozessor von AUBO für die kollaborative Roboterreihe des Unternehmens ansehen.
Der AUBO-Postprozessor enthält die folgenden Eigenschaften:
- PROG EXT — Dies ist die Programmerweiterung und ist in vielen Postprozessoren enthalten. Es gibt den Dateityp an, den RoboDK generiert.
- SPEED MS und SPEED RAD — Dies gibt die Geschwindigkeit in Metern pro Sekunde und Bogenmaß für kreisförmige Bewegungen an.
- ACCEL MSS und ACCEL RADSS – Dies gibt die Beschleunigung des Roboters in Metern pro Quadratsekunde oder Bogenmaß pro Quadratsekunde für kreisförmige Beschleunigungen an.
Wie Sie sehen können, sind die Eigenschaften oft nur aus ihren Namenskonventionen ersichtlich. Wo jedoch der Zweck einer Eigenschaft nicht sofort offensichtlich ist, gibt es normalerweise eine Beschreibung davon im Editor und oft auch empfohlene Werte.
Wenn Sie den Zweck einer bestimmten Eigenschaft immer noch nicht herausfinden können, finden Sie möglicherweise Informationen im Handbuch Ihres Roboters oder Sie können eine Frage im RoboDK-Forum stellen.
Hier finden Sie den neuen RoboDK-Postprozessor-Editor
Sie haben begonnen, den Postprozessor Ihres Roboters mit dem RoboDK-Editor zu bearbeiten!
Informationen zur Aktivierung und Verwendung des Editors finden Sie auf unserer Dokumentationsseite.
Fragen? Erzählen Sie es uns in den Kommentaren unten oder nehmen Sie an der Diskussion auf LinkedIn, Twitter, Facebook, Instagram oder im RoboDK-Forum teil. Schauen Sie sich auch unsere umfangreiche Videosammlung an und abonnieren Sie den RoboDK-YouTube-Kanal
Industrieroboter
- Entschlüsseln von Software für die vorbeugende Wartung:Was sie tut und wie man sie verwendet
- Ferninbetriebnahme:Warum Sie sie brauchen und wie Sie sie verwenden
- Gesamte effektive Geräteleistung:Was ist TEEP und wie können Sie damit die Planung verbessern
- P-F-Kurve:Was es ist und wie man es bei der Wartung verwendet
- Was ist ein Druckabfall und wie verhindert man ihn?
- Was ist ein Verdichter und wie wähle ich den richtigen aus?
- Industrielle Kupplungen:Was sind sie und wie werden sie verwendet?
- PIC18-Mikrocontroller:Was er ist und wie er verwendet wird
- Was ist eine Ironworker-Maschine und warum brauchen Sie eine?
- Was ist ein Referenzdesignator und wie verwenden wir ihn in der Montage?