


MeArm-Roboterarm – Ihr Roboter – V1.0
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Über dieses Projekt
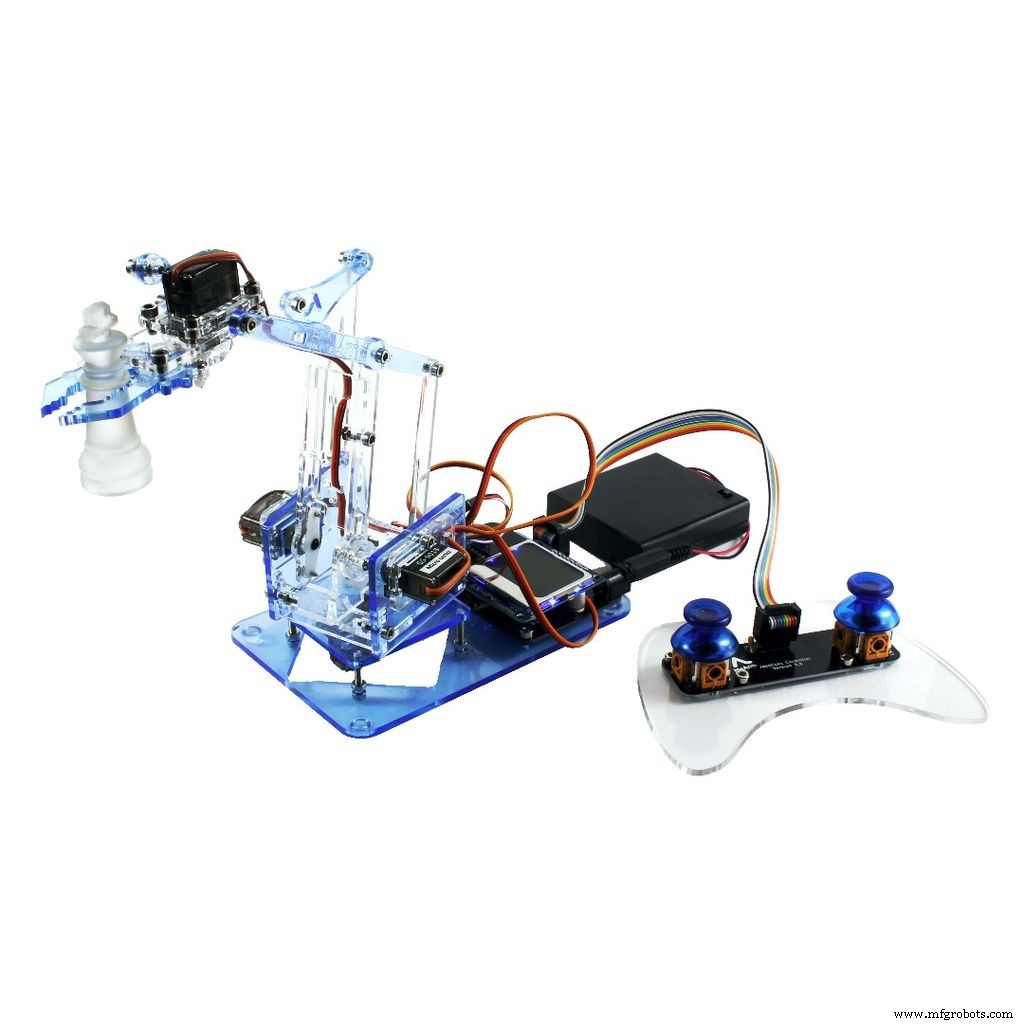
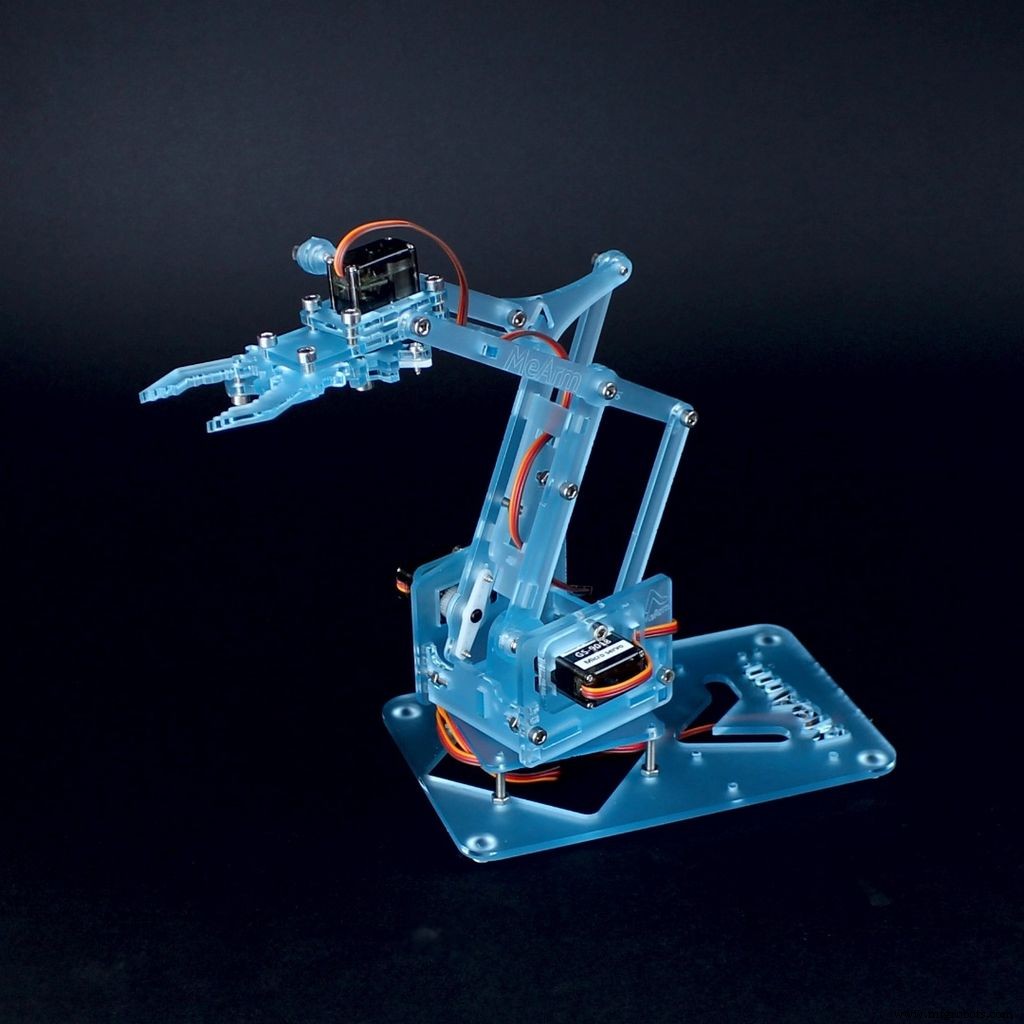
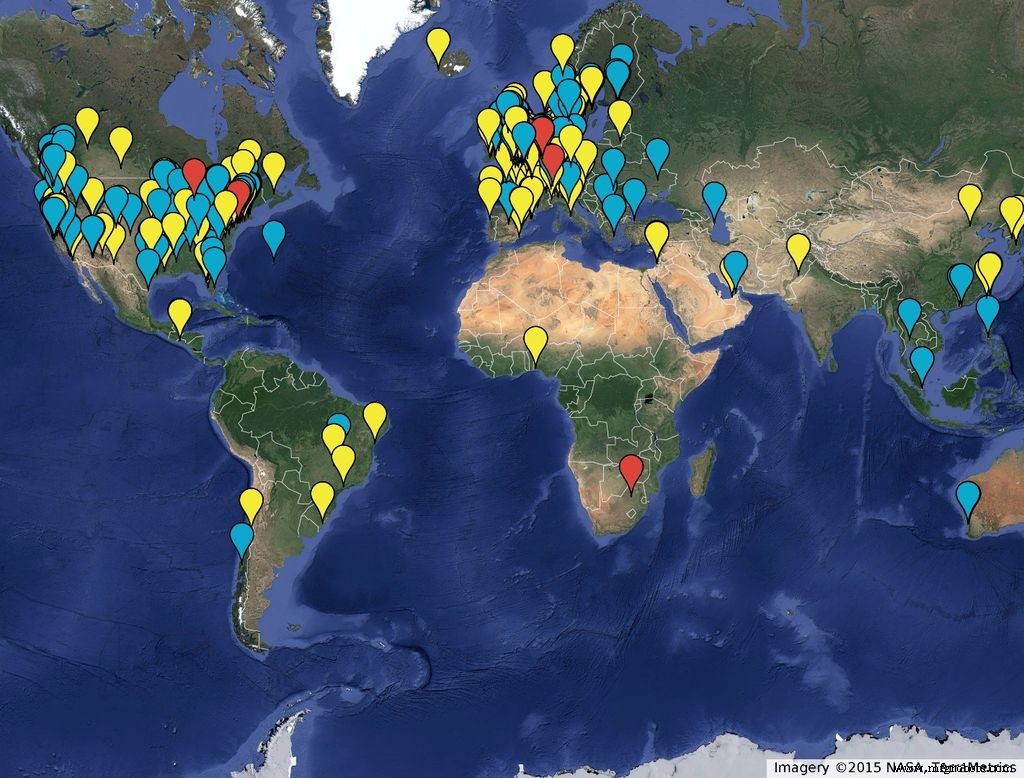
Dies ist die neueste Version der Bauanleitung für den MeArm-Roboterarm. Der MeArm kam im April 2014 zum ersten Mal zu Instructables, als wir einen zweiten Preis im Robots Contest beanspruchten. Seitdem haben wir weltweit rund 10.000 gebaute gesehen! Auf unserer Karte sind nur eine Handvoll gezeigt, aber wir sind wirklich stolz darauf, dass wir mit Hilfe von Instructables der erste virale Roboter der Welt geworden sind!
Wir haben diese Anleitungen zusammengestellt, um die auf unserer Ressourcenseite zu ergänzen.
Schritt 1:Schnappen Sie sich Ihre Dateien, feuern Sie Ihre Lazors an!
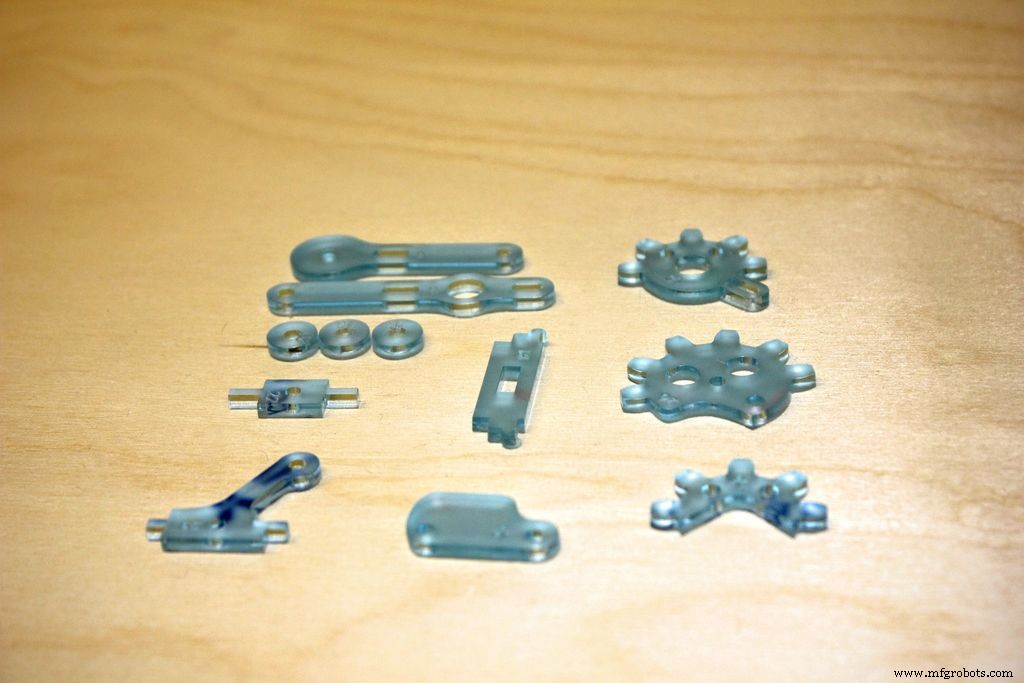
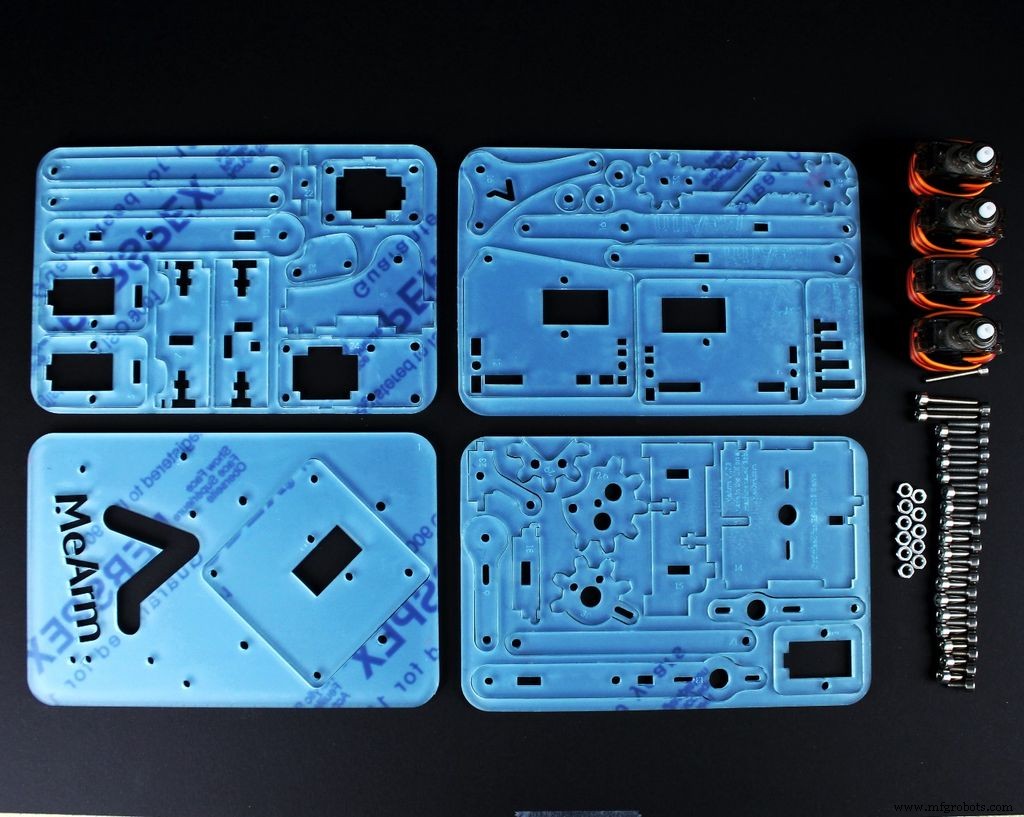
Der MeArm ist immer noch und war so ziemlich immer Open-Source-Hardware. So können Sie unsere Dateien bei thingiverse abrufen. Da es sich um eine .dxf-Datei handelt, sollte sie auf den meisten Laserschneidern funktionieren. Wir haben die Teile mit einem Rahmen versehen, damit Sie sie auf die richtige Größe einstellen können. Wir verwenden 3 mm Acryl, aber das Design ist ziemlich tolerant und wir haben es aus Holz und sogar 3D-gedruckt gesehen.
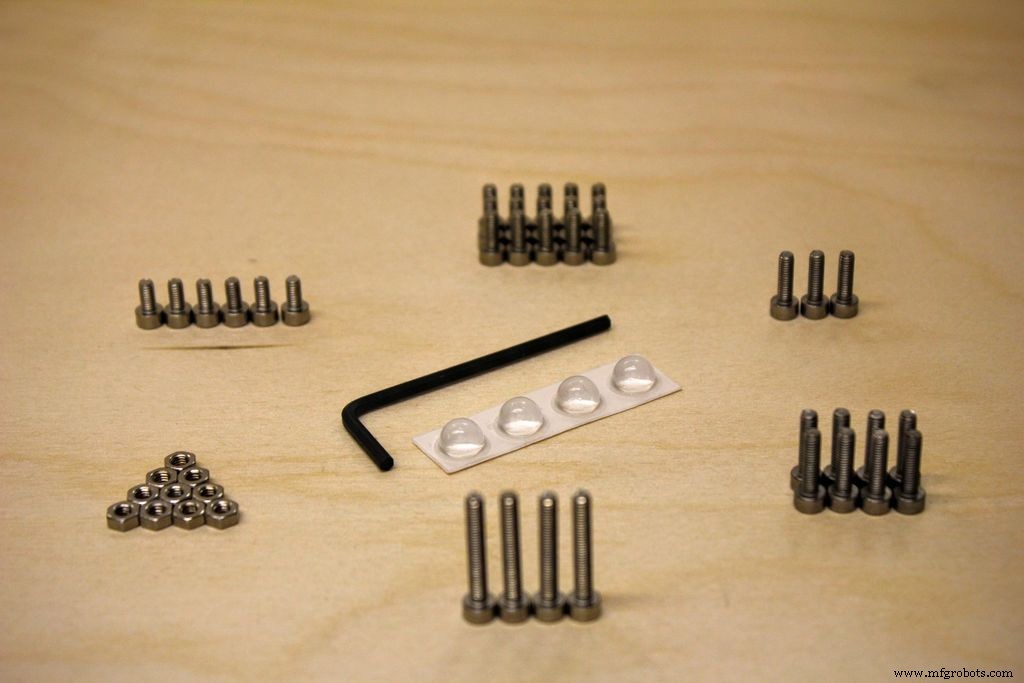
Du brauchst auch ein paar Schrauben. Die aktuelle Auslastung erfordert:
Mutter x 11
6 mm x 7
8 mm x 15
10 mm x 5
12 mm x 8
20 mm x 4
Alle M3-Größen, das sind metrische 3 mm. Was ich verstehe, kann in den Staaten schwer zu finden sein, aber komm schon, du hast es bis zum Mond geschafft, du kannst eine geeignete Alternative finden!
Schritt 2:Halt! Lass uns kalibrieren!
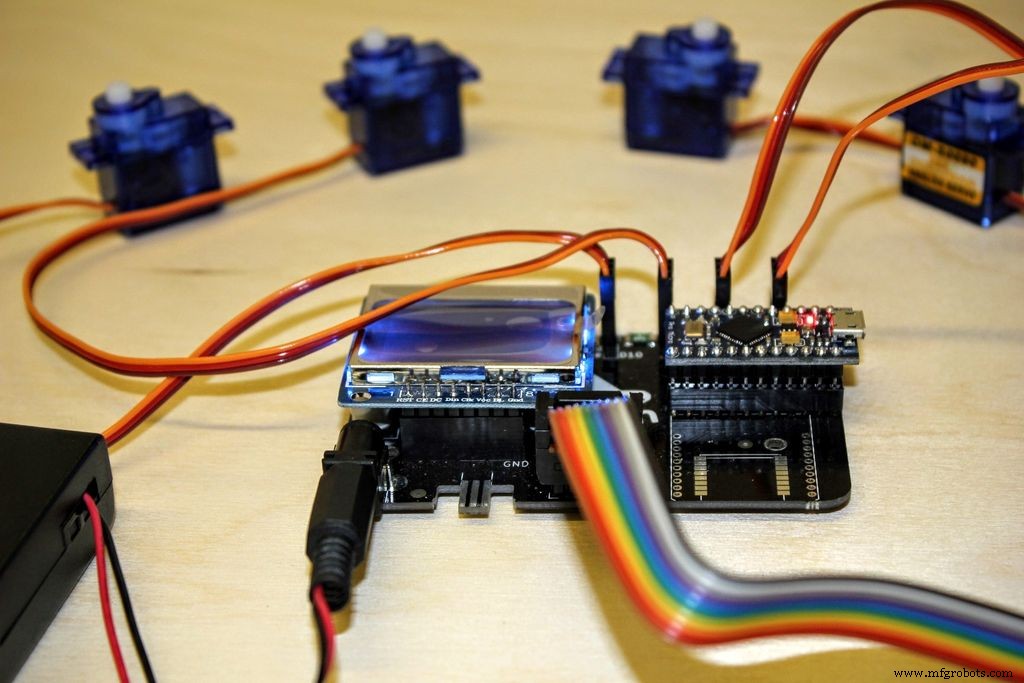

Wenn Sie Ihre Teile lasergeschnitten oder eines unserer Kits gekauft haben, möchten Sie es wirklich bauen. Aber zuerst müssen Sie einen wichtigen Schritt abschließen. Wir müssen die Servos kalibrieren. Hier verwenden wir unser Brains Board, das Arduino-kompatibel ist, aber Sie können alles verwenden, was ein PWM-Signal erzeugt, um sie zu kalibrieren. Es gibt MeArm-Code für Arduino, Raspberry Pi, Beaglebone Black, Sparkcore und Espruino.
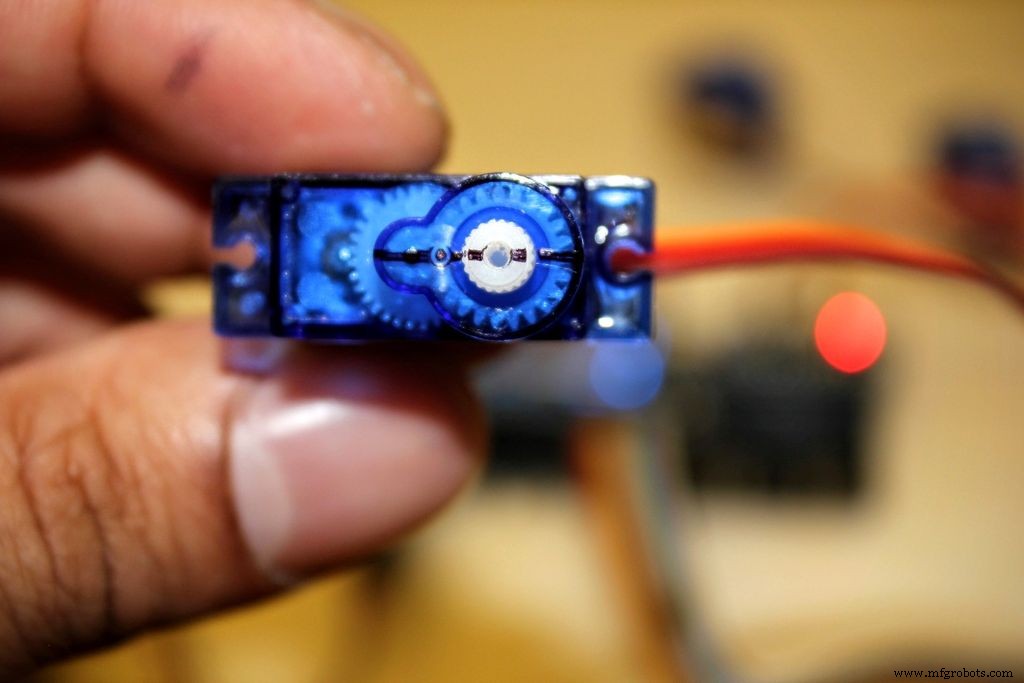
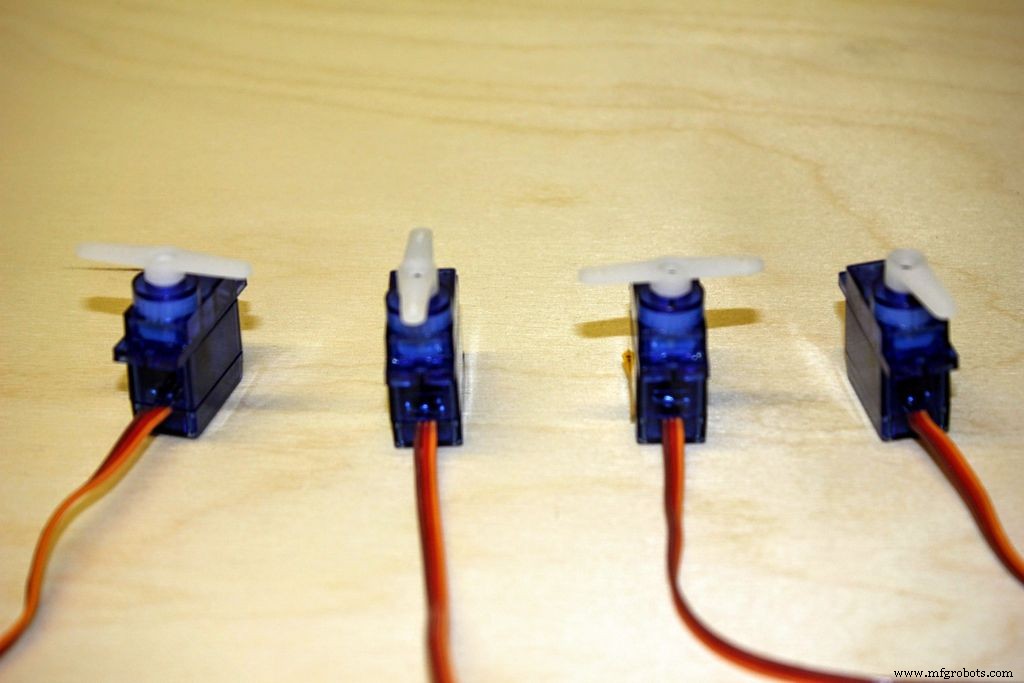
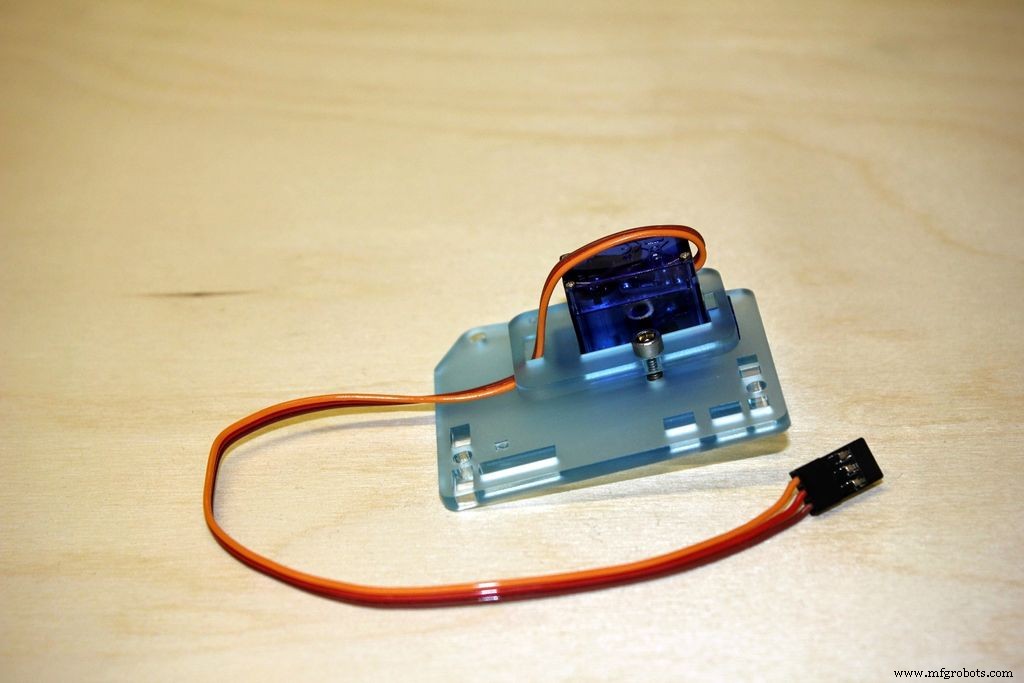
Mit unserem Brains Board wird es so programmiert, dass es zu den Standardpositionen geht. Das sind 90, 90, 90 und 25 für die Servos für die Mitte, links, rechts und die Klaue. Markieren Sie eine Mittellinie auf der Spindel und dem Körper des Servos und Sie können sie auch mit c, l, r und c oder mit einem anderen System markieren, das Ihnen etwas bedeutet.
Lassen Sie sich nicht dazu verleiten, sie mit der Hand zu drehen, das Drehmoment Ihrer gewaltigen Kraft könnte die Servozahnräder zerreißen. Aus dem gleichen Grund ist es sehr wichtig, dass Sie diesen Vorgang durchführen, bevor Sie Ihren MeArm bauen.
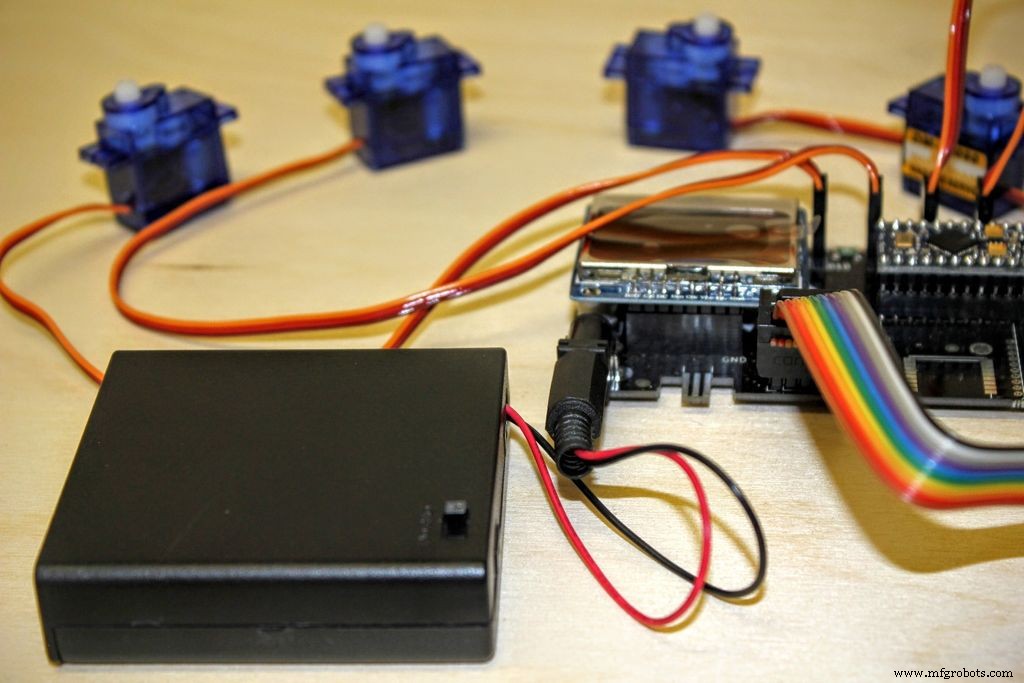
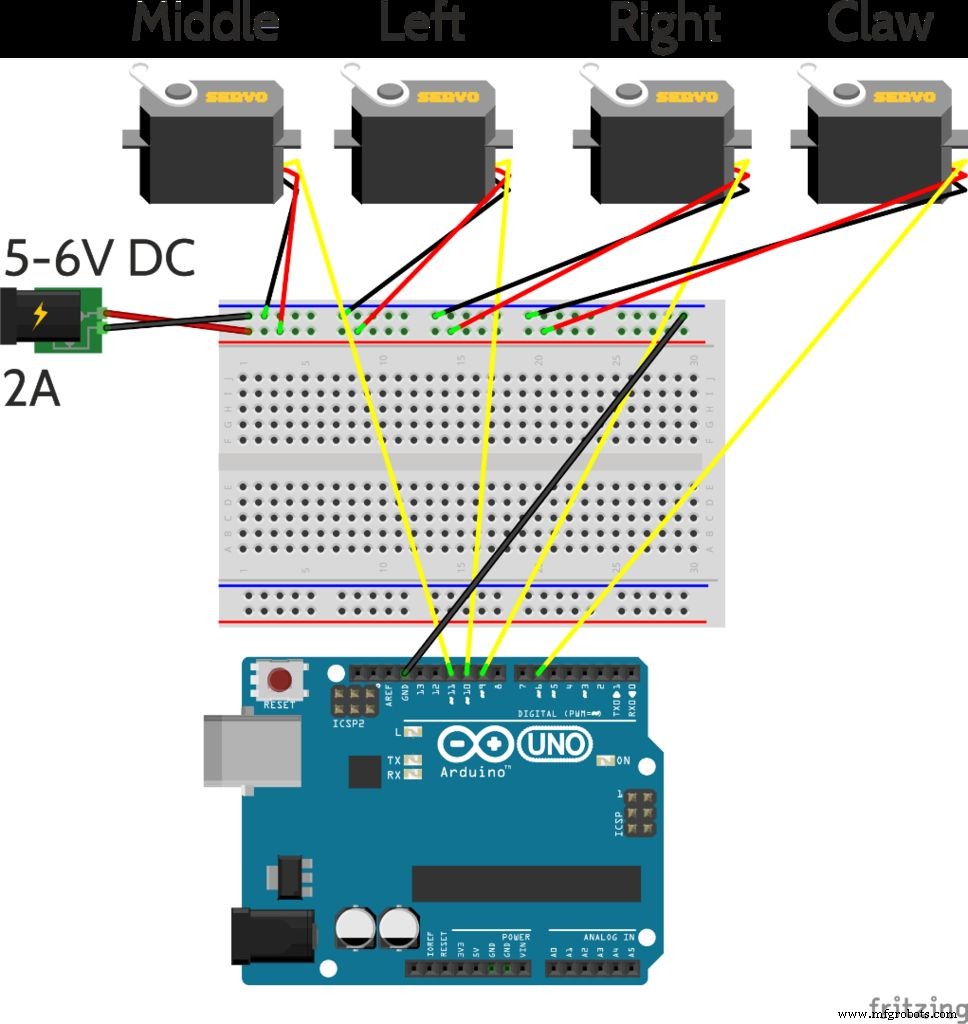
Wenn Sie und Arduino verwenden, erhalten Sie mit dem im obigen Bild gezeigten Setup und diesem Code das gleiche Ergebnis. Wir verwenden Codebender für unseren Democode und würden uns über ein T-Shirt freuen. Verwenden Sie also bitte diesen Link, wenn Sie ein Konto eröffnen möchten.
Der wichtigste Teil beim Einrichten Ihrer Servos ist, dass Sie sie nicht über Ihren Mikrocontroller mit Strom versorgen können. Sie benötigen ein separates 5-6V 2A Netzteil mit einer gemeinsamen Masse zum Mikrocontroller. Sehen Sie sich das Arduino-Setup-Bild für weitere Informationen an.
Schritt 3:Los geht's!
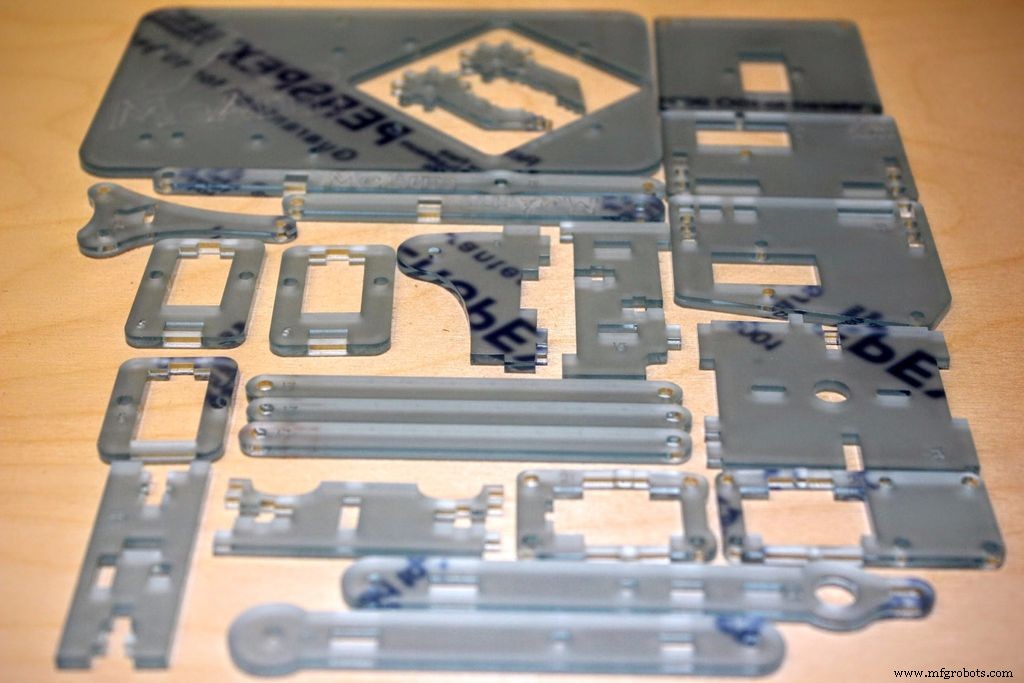
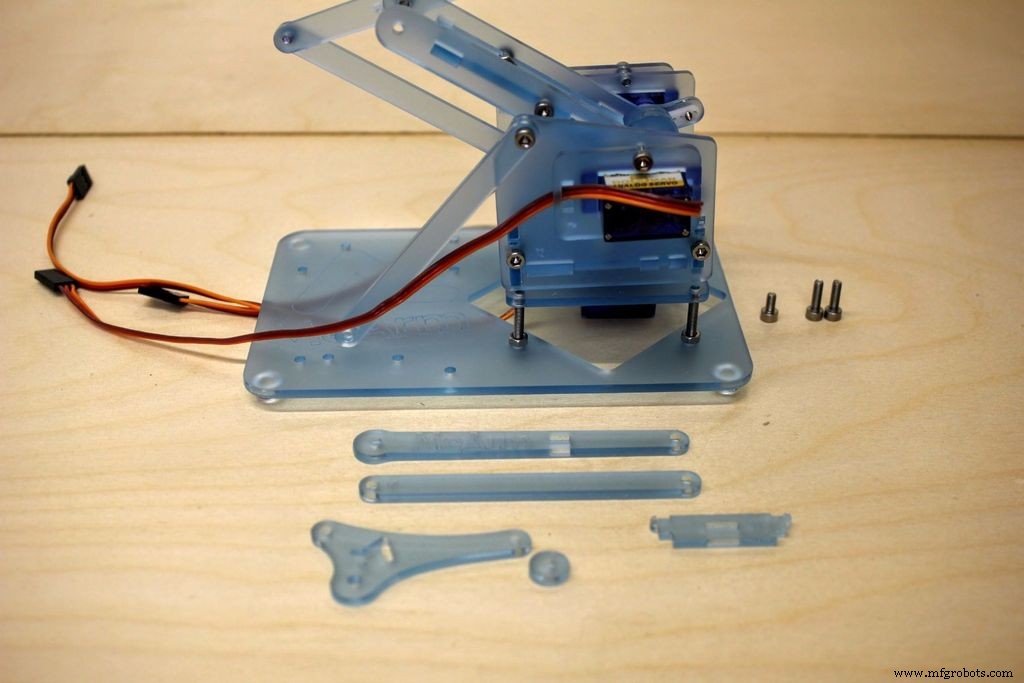
Mit Ihren kalibrierten Servos können wir richtig loslegen. Buchstäblich, wenn Sie eines unserer Snap-Out-Pakete haben!
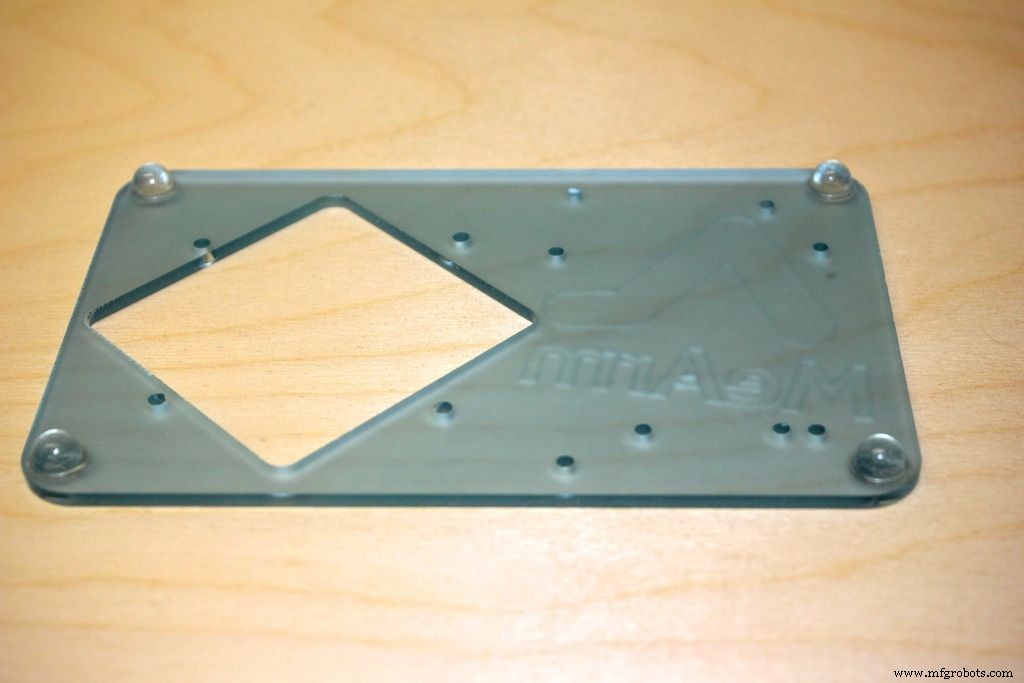
Sie müssen wahrscheinlich einige Zeit damit verbringen, die Schutzfolie der Acrylteile zu entfernen. Sie können dies entweder nacheinander oder auf einmal tun. Ihr Anruf.
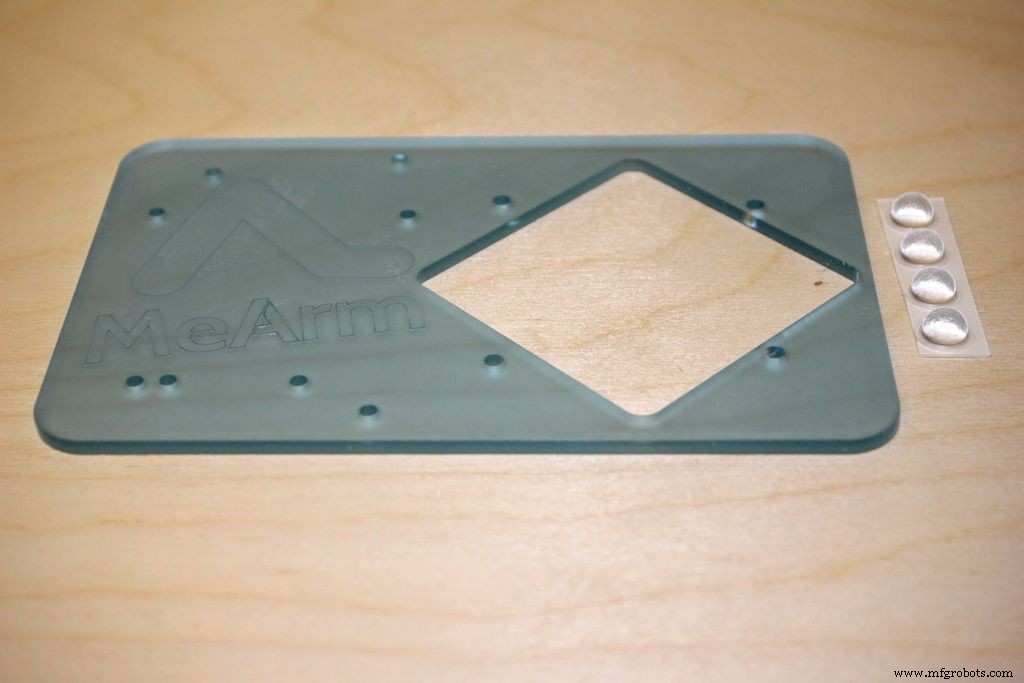
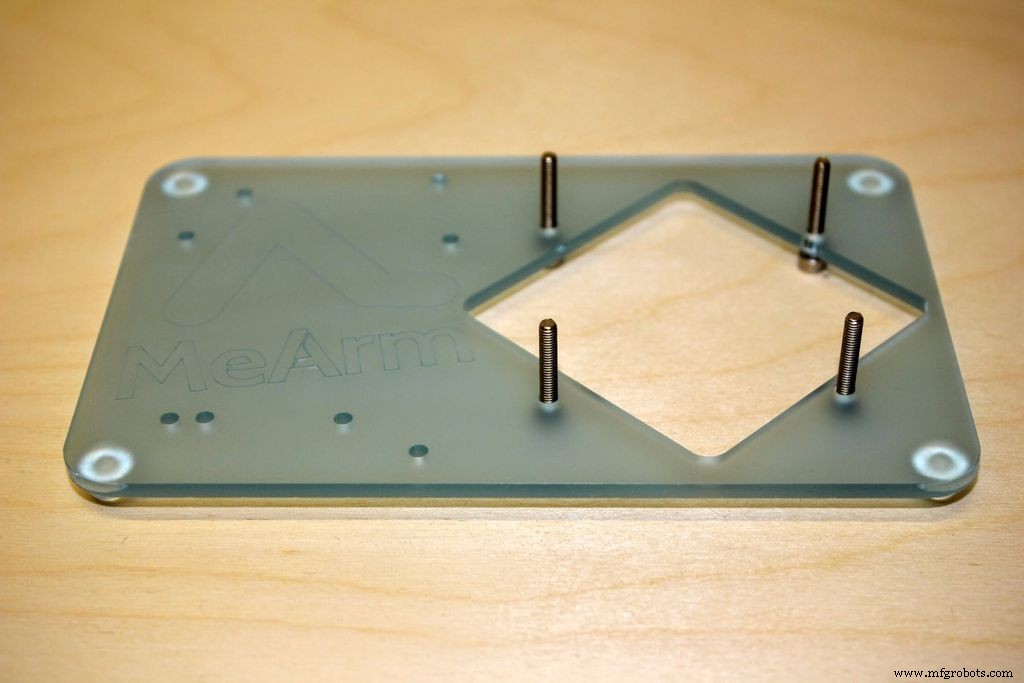
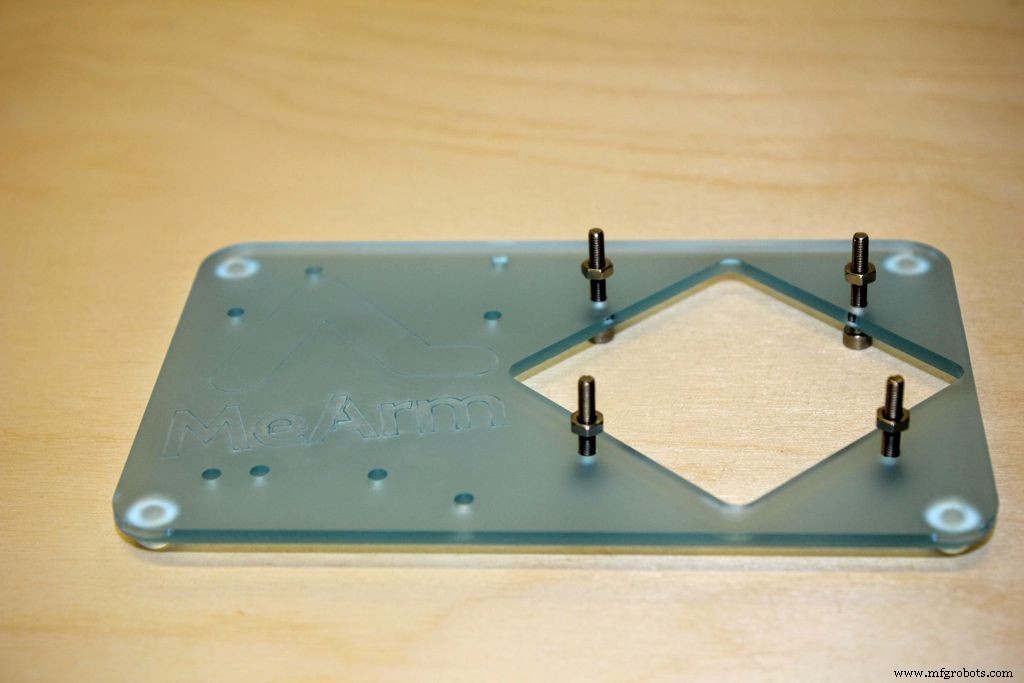
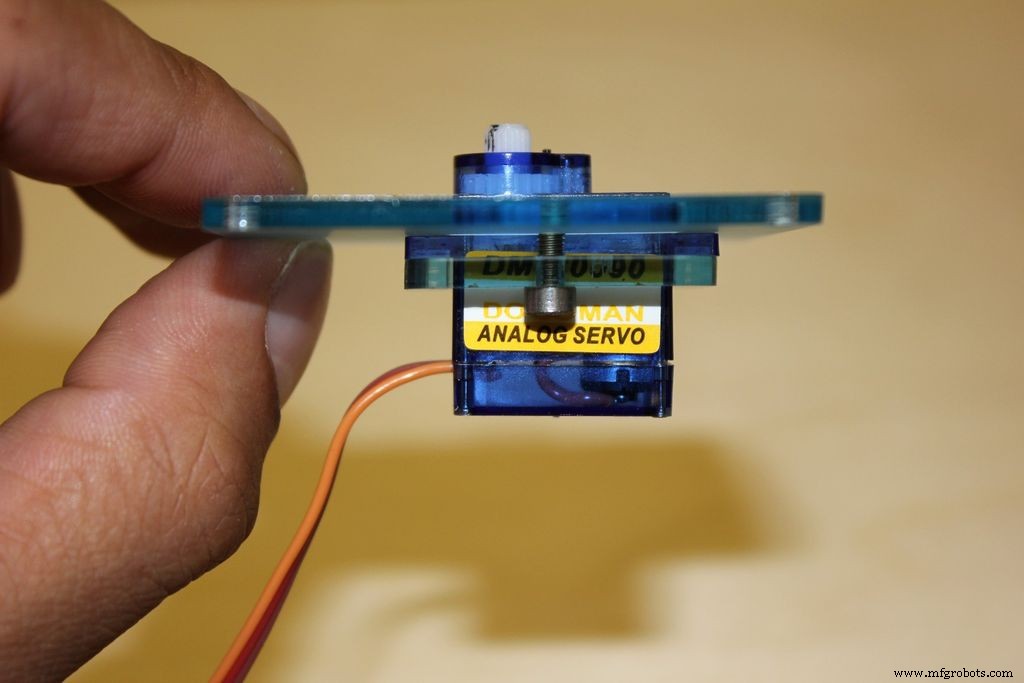
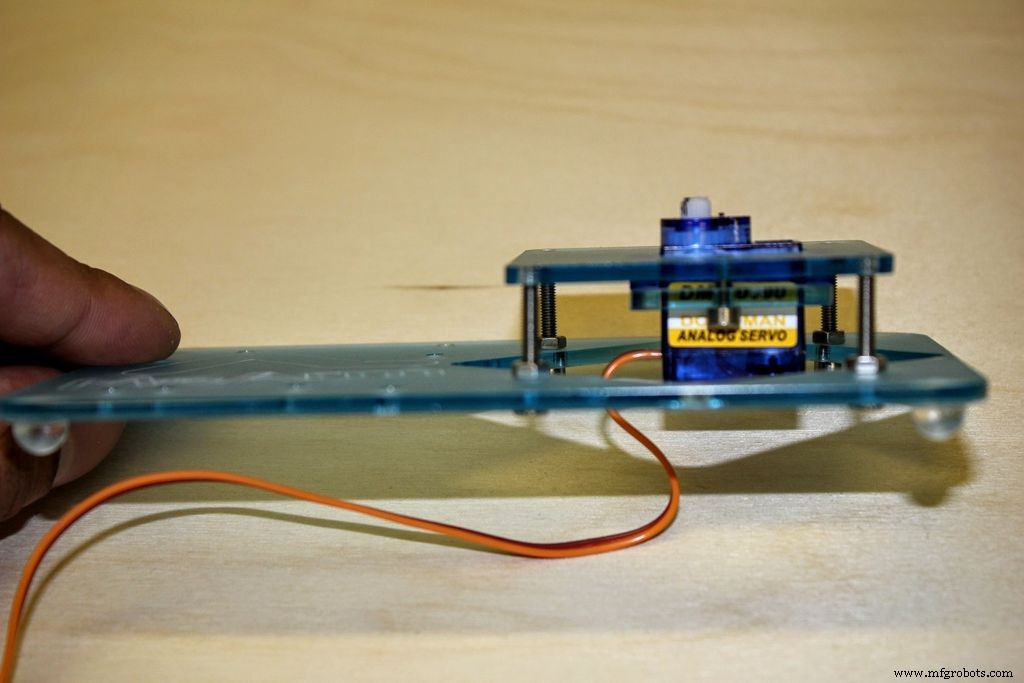
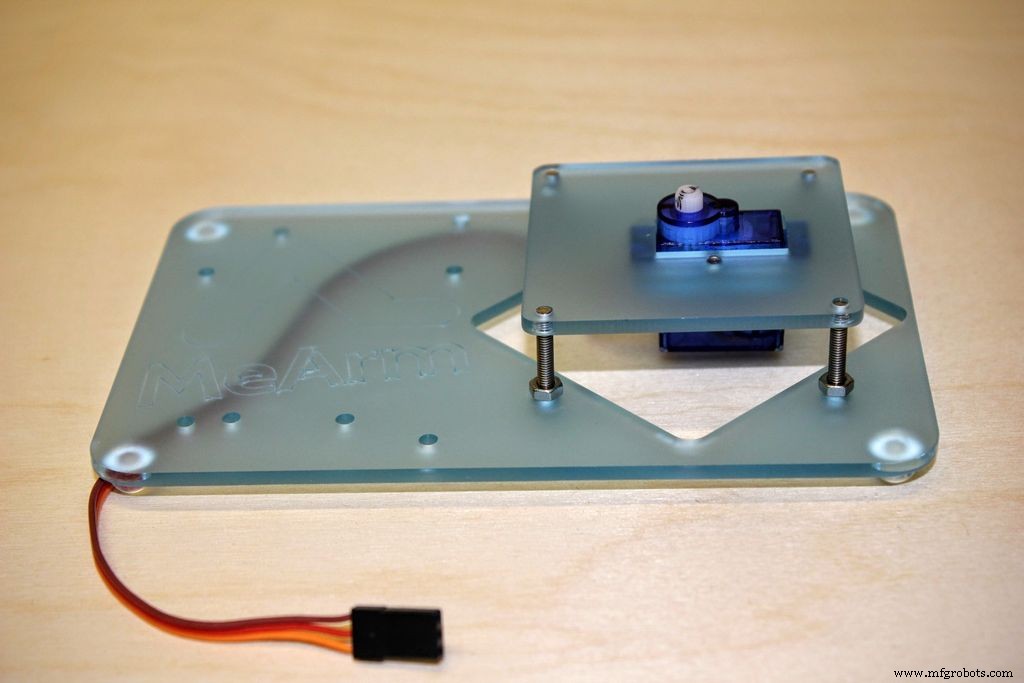
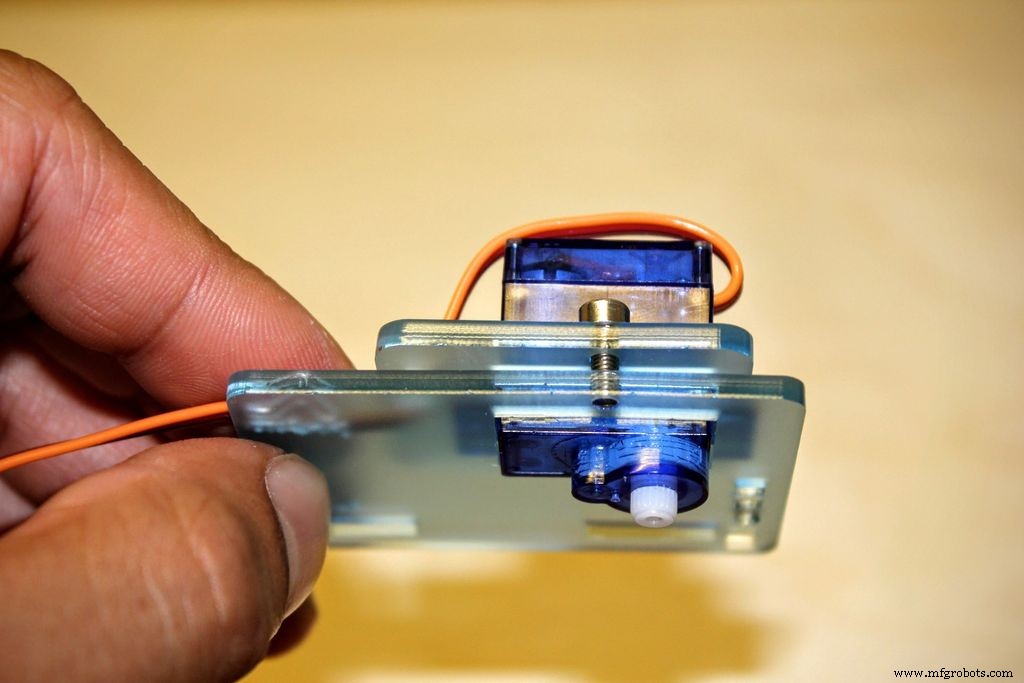
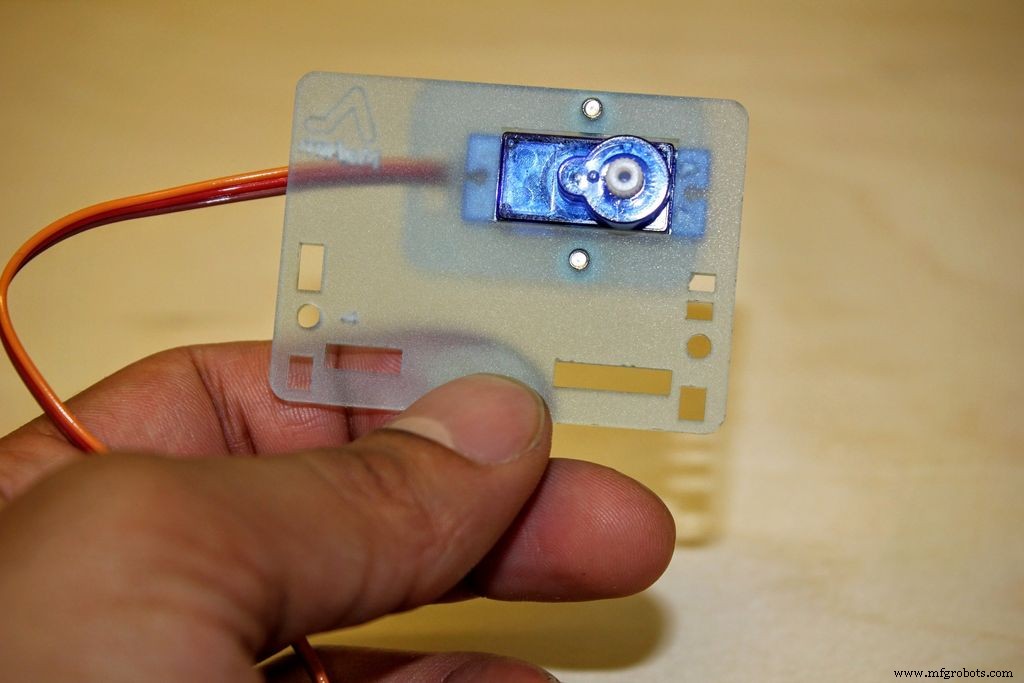
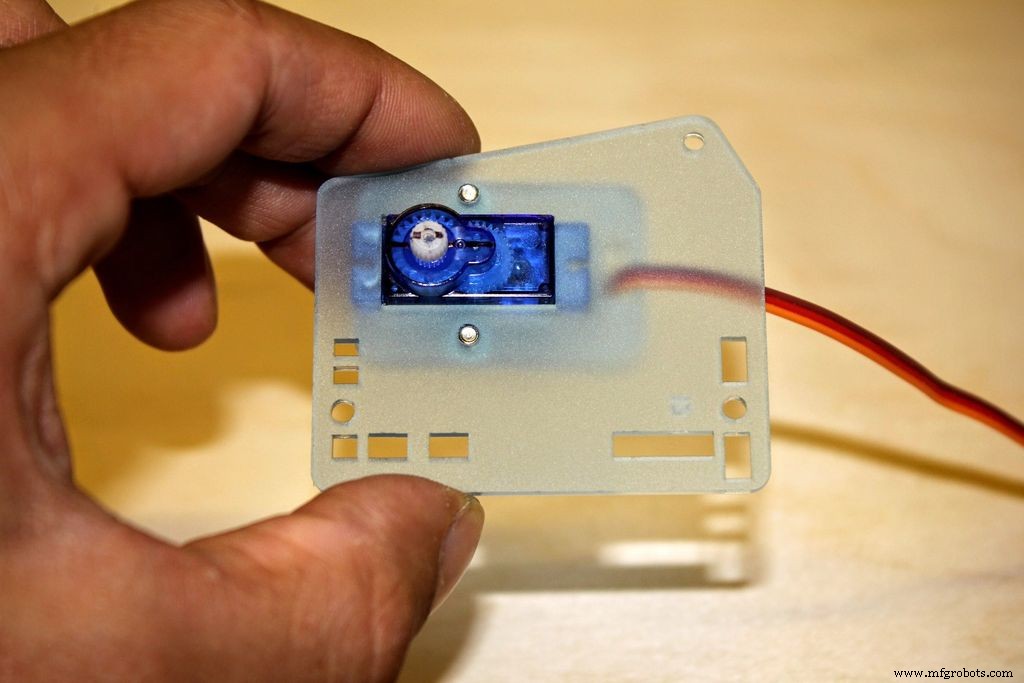
Suchen Sie den größten Teil (#1) und befestigen Sie die klebrigen Pad-Füße an den Ecken. Setzen Sie dann die vier 20mm Schrauben von der Unterseite ein und schrauben Sie vier Muttern bis zur Hälfte fest. Suchen Sie nun Teil #2, #3, Ihr Mittelservo und zwei 8-mm-Schrauben. Fädeln Sie das Servo durch Teil # 3, das wir als Kragen bezeichnen. Schieben Sie die Schrauben durch die Manschette und schrauben Sie sie dann in Teil Nr. 2 ein.
Die Schrauben bohren sich selbst in Teil #2, d.h. sie schneiden ihr eigenes Gewinde. Auf dem MeArm gibt es zwei Lochgrößen, eine bei etwa 3 mm, durch die Sie die Schraube schieben können, und die andere bei etwa 2,6 mm, bei der die Schraube selbstschneidend sein soll. Dies ist eine Methode, die wir von der erstaunlichen PlotClock von Joo übernommen haben.
Jetzt befestigen wir die Servo- / Kragenbaugruppe mit den 20-mm-Schrauben an Teil Nr. 1, diese werden selbstschneidend und die Ausrichtung der Löcher an den Teilen sollte bedeuten, dass Sie sie nicht falsch herum bekommen können. Dies wird Poka-Yoke genannt und ist eine Methode, um Designs narrensicher zu machen. Wenn Sie ein frühes Modell v1.0 haben, werden Sie feststellen, dass mein Versuch zu eifrig ist, da es nur 1/8 Möglichkeiten gibt, es richtig zu machen (wenn Sie die Löcher nicht zusammenbringen können, drehen Sie das Teil um). Spätere Versionen wurden durch den Rat von Scott Pierce gemildert und haben 1/2 Möglichkeiten.
Schritt 4:Linke Seite
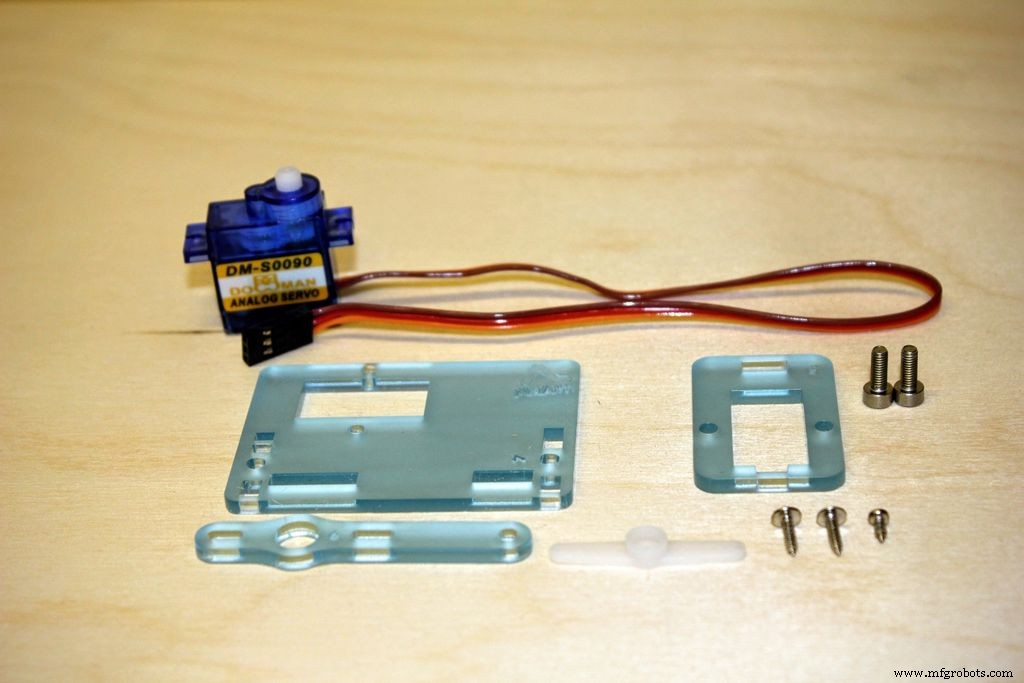
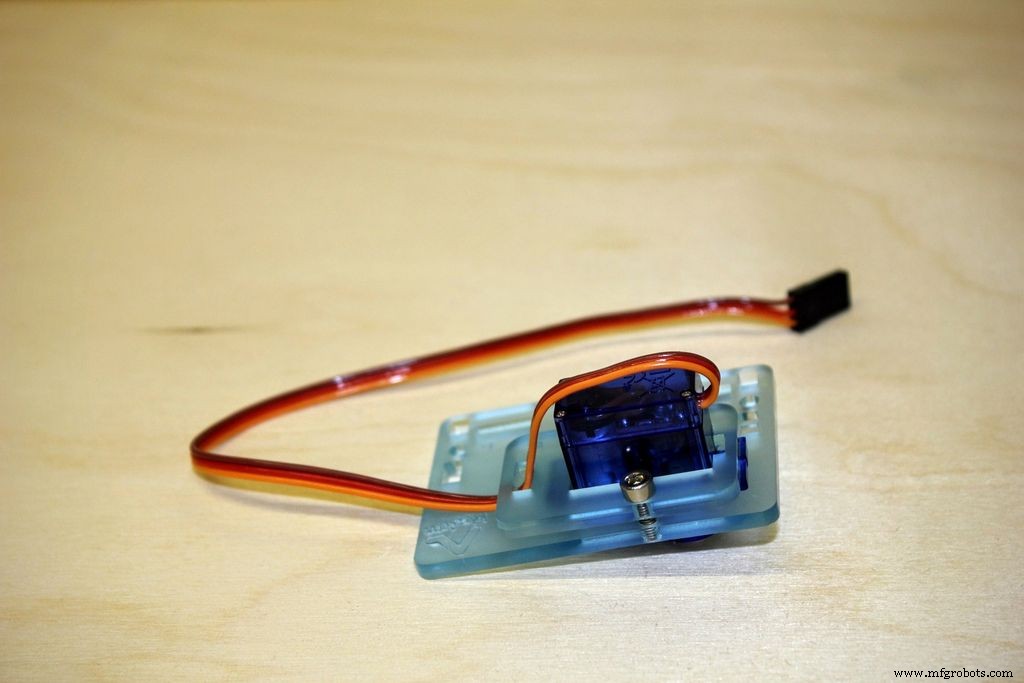

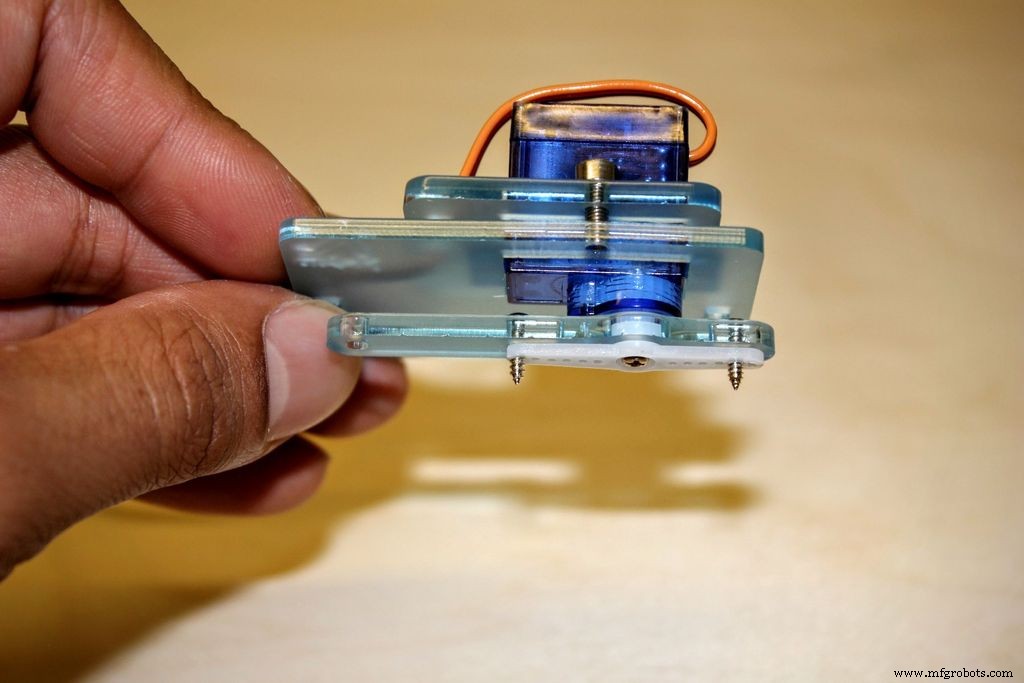
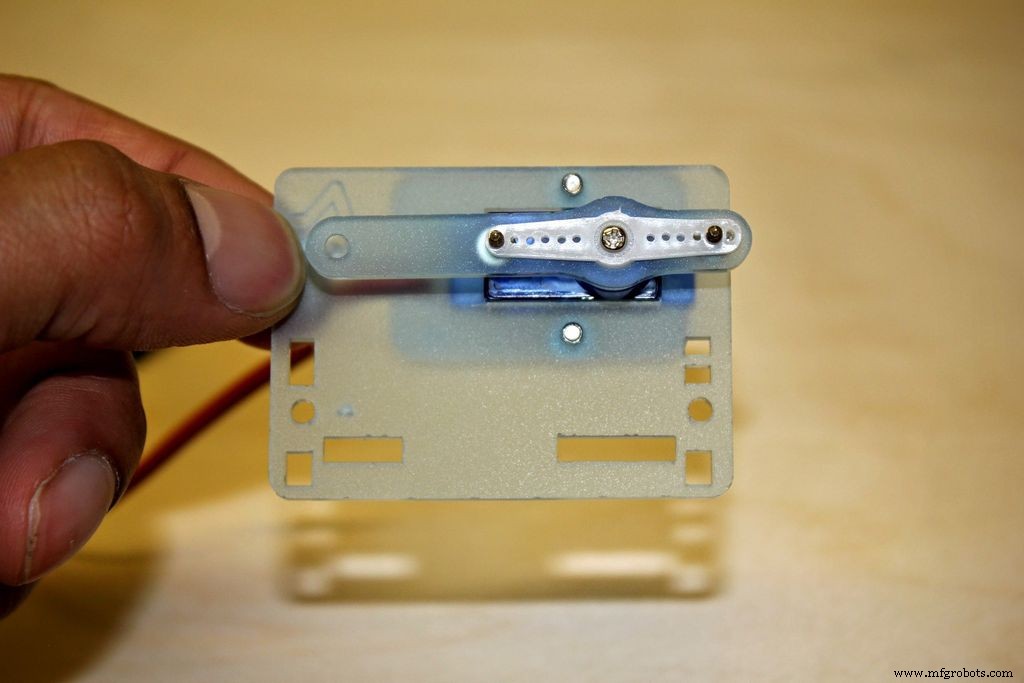
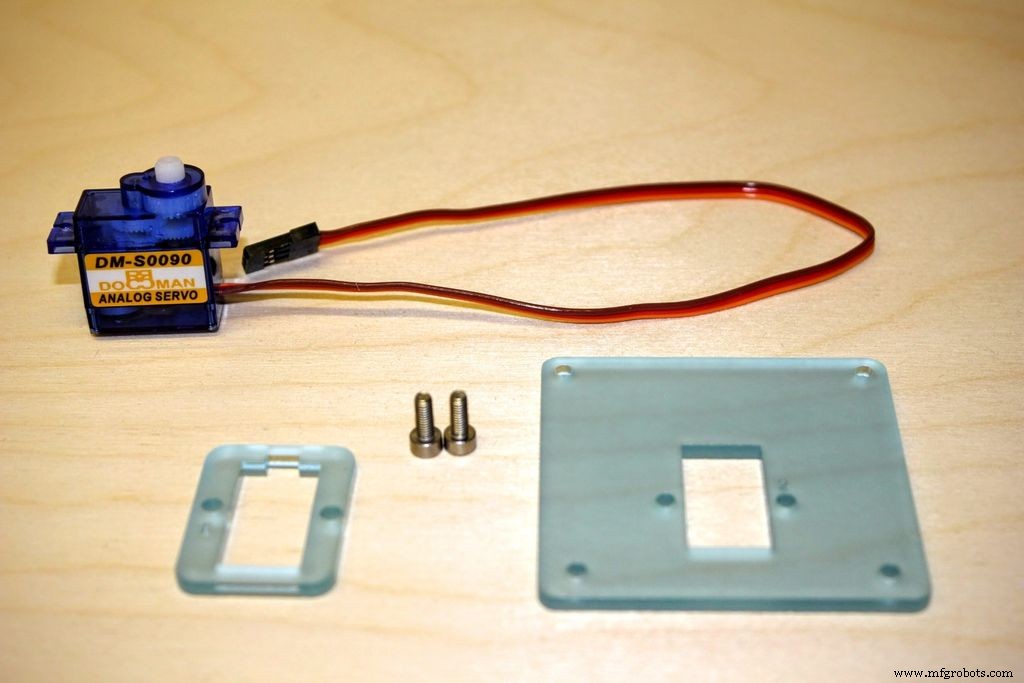
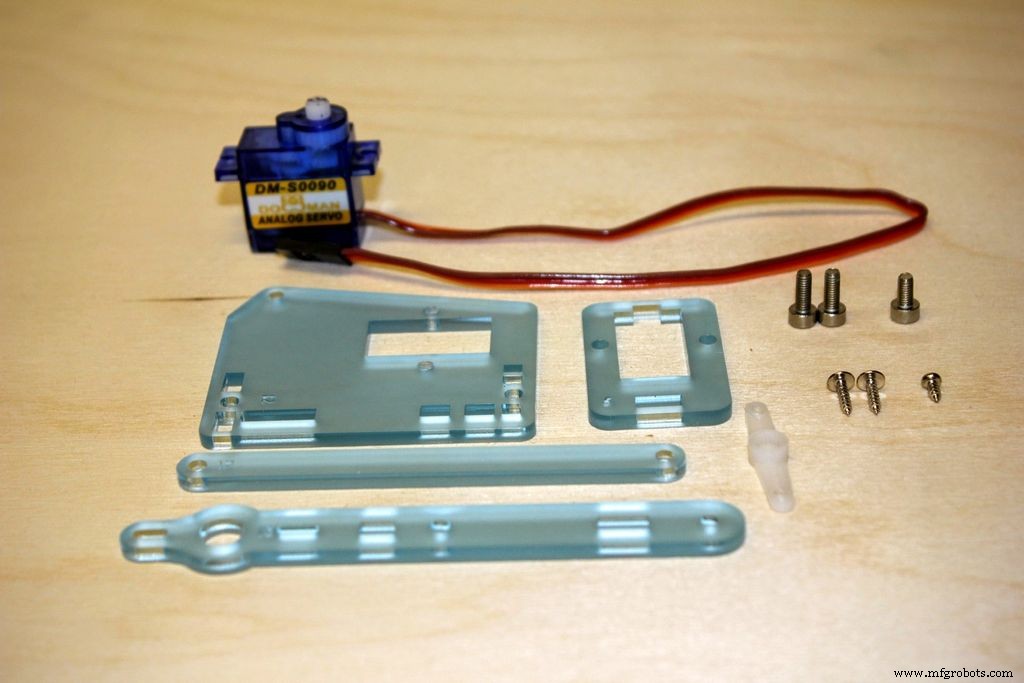
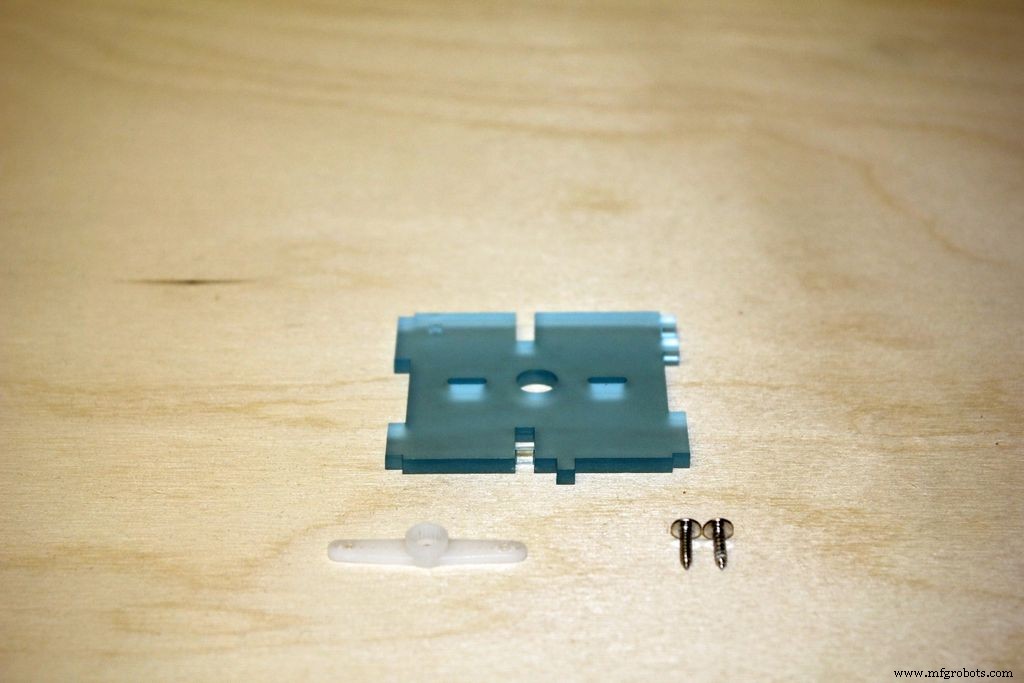
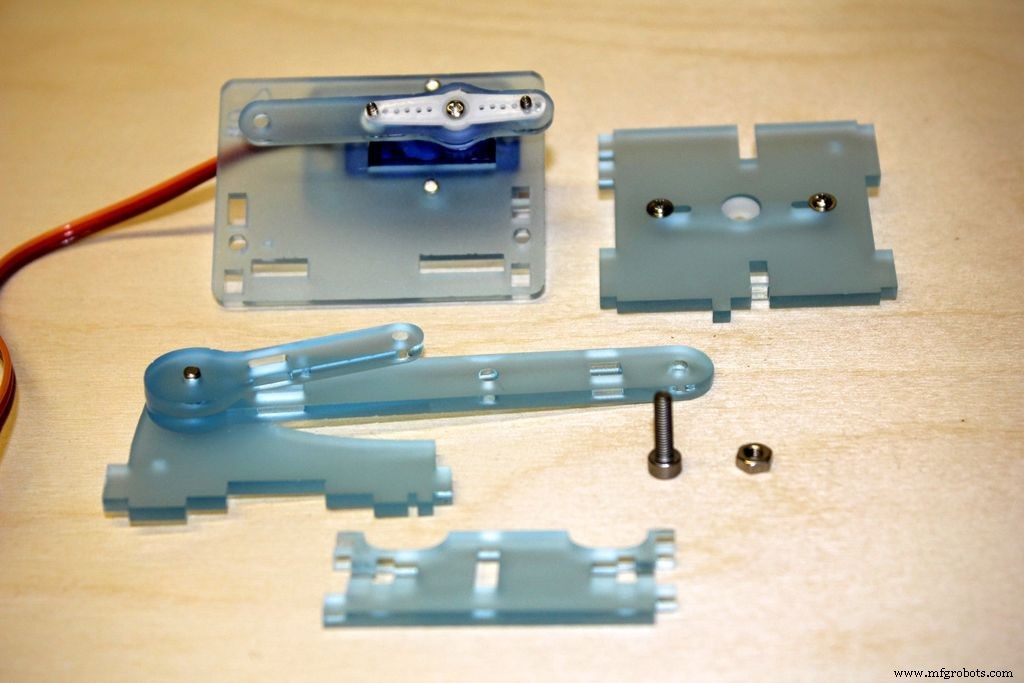
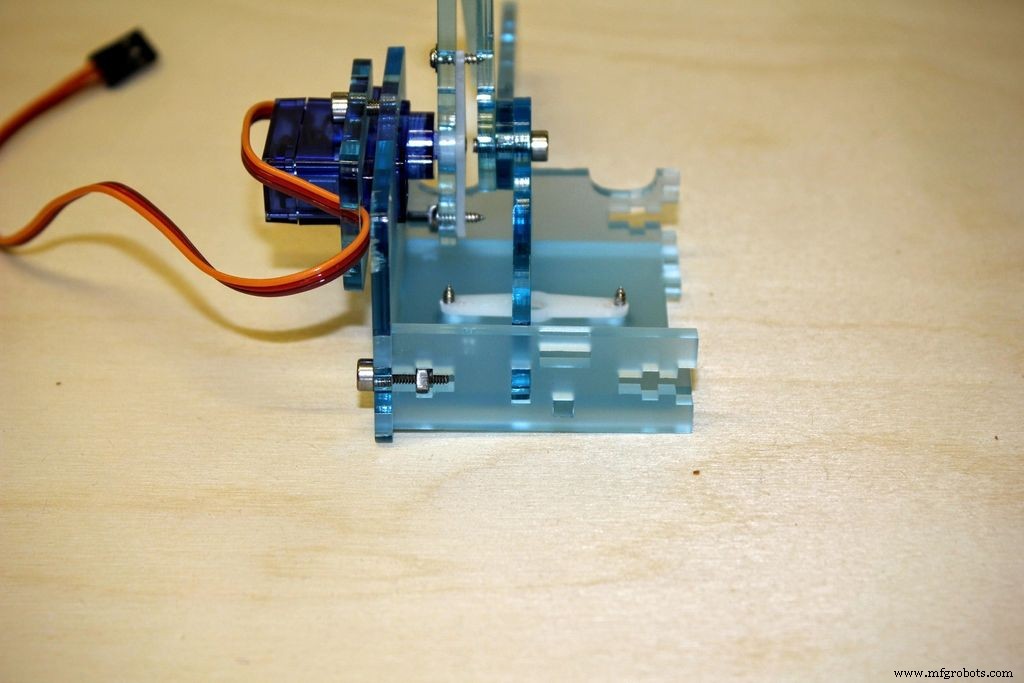
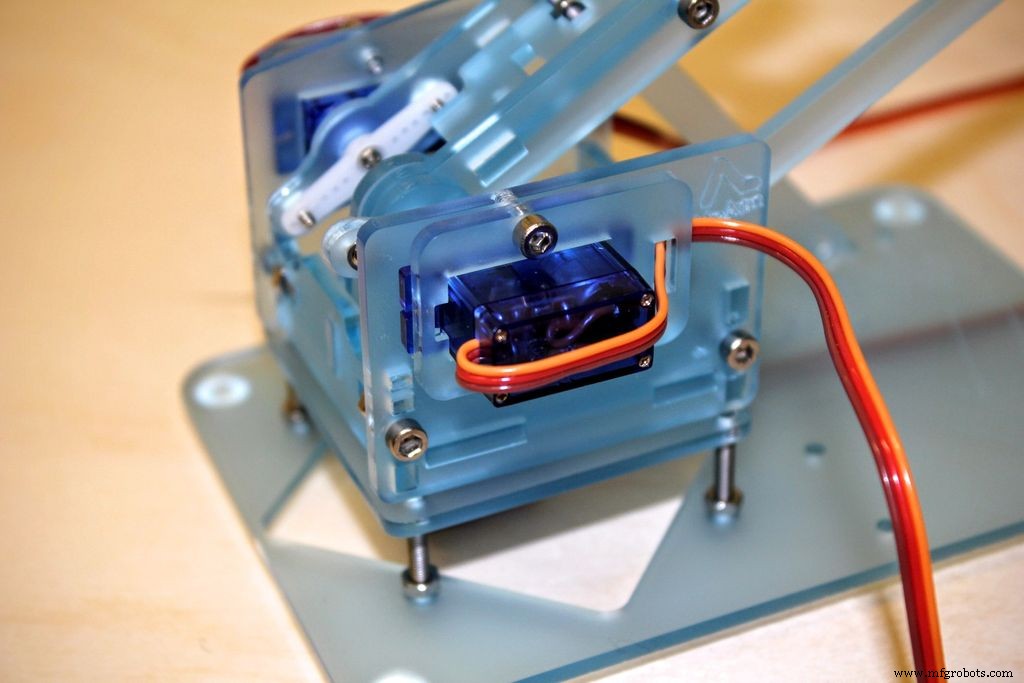
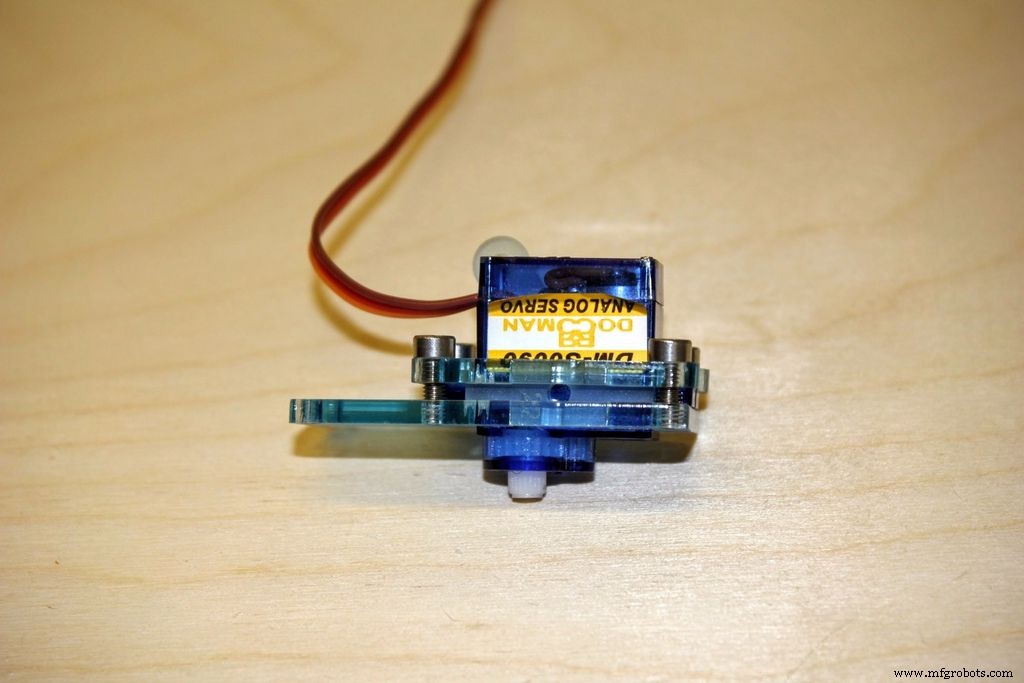
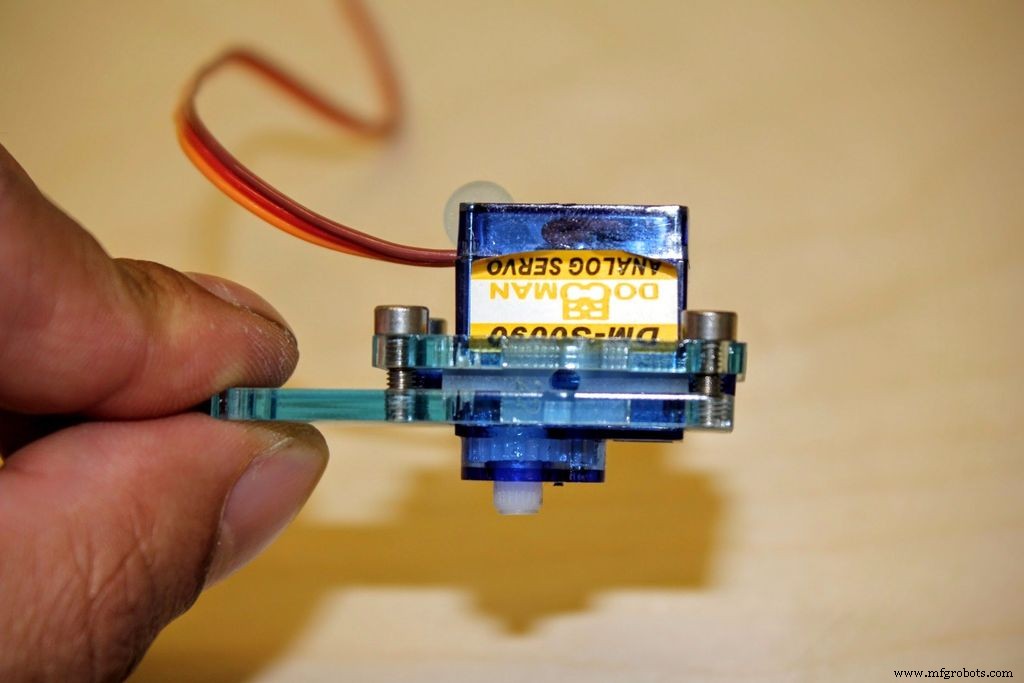
Suchen Sie nun die Teile Nr. 4, Nr. 5, Nr. 6, das linke Servo, zwei 8-mm-Schrauben und ein Servo-Befestigungspaket.
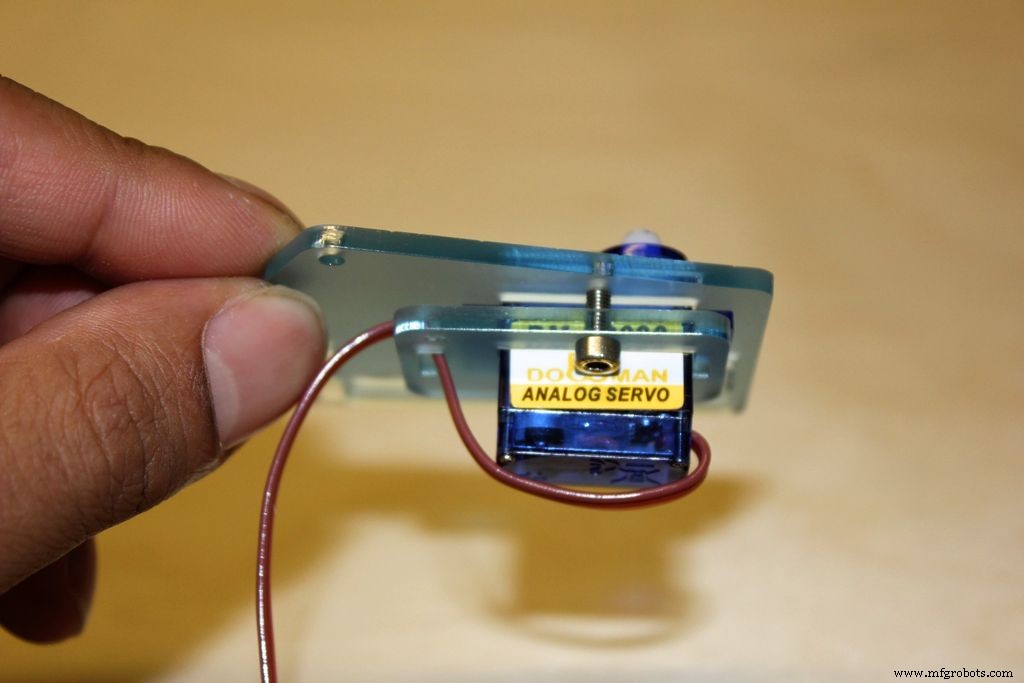
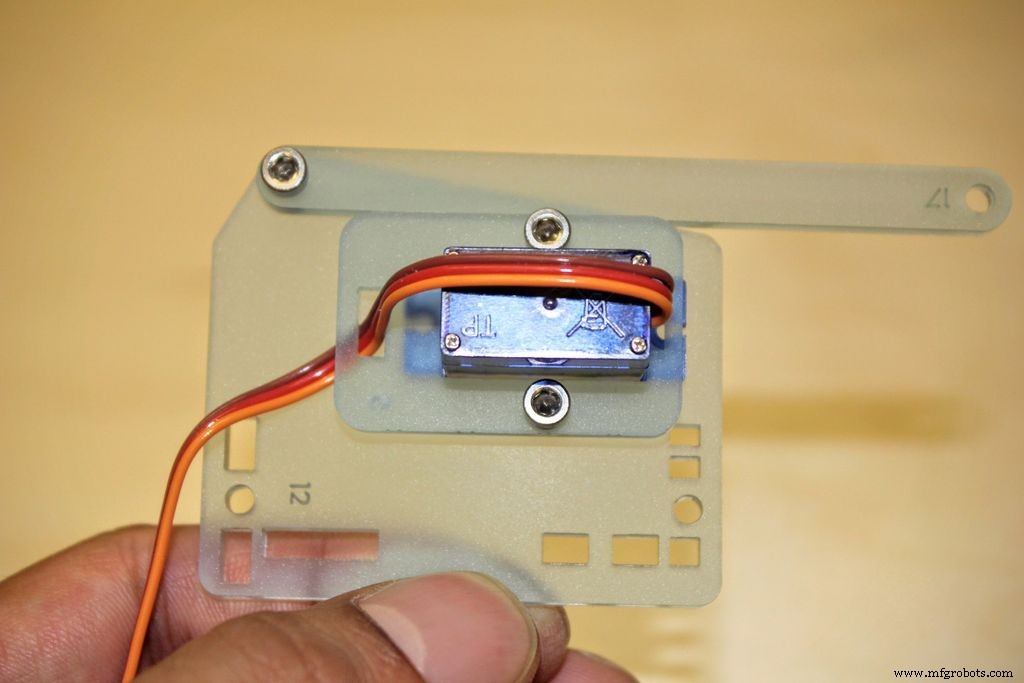
Fädeln Sie das Servo durch den Kragen (Teil #5) und dann das Servokabel durch das Kabelführungsloch. Schrauben Sie den Kragen mit den 8-mm-Schrauben an Teil Nr. 4 Achten Sie darauf, dass Sie ihn nicht zu fest anziehen . Sie möchten nicht, dass sich das Acryl verbiegt, halten Sie einfach das Servo fest.
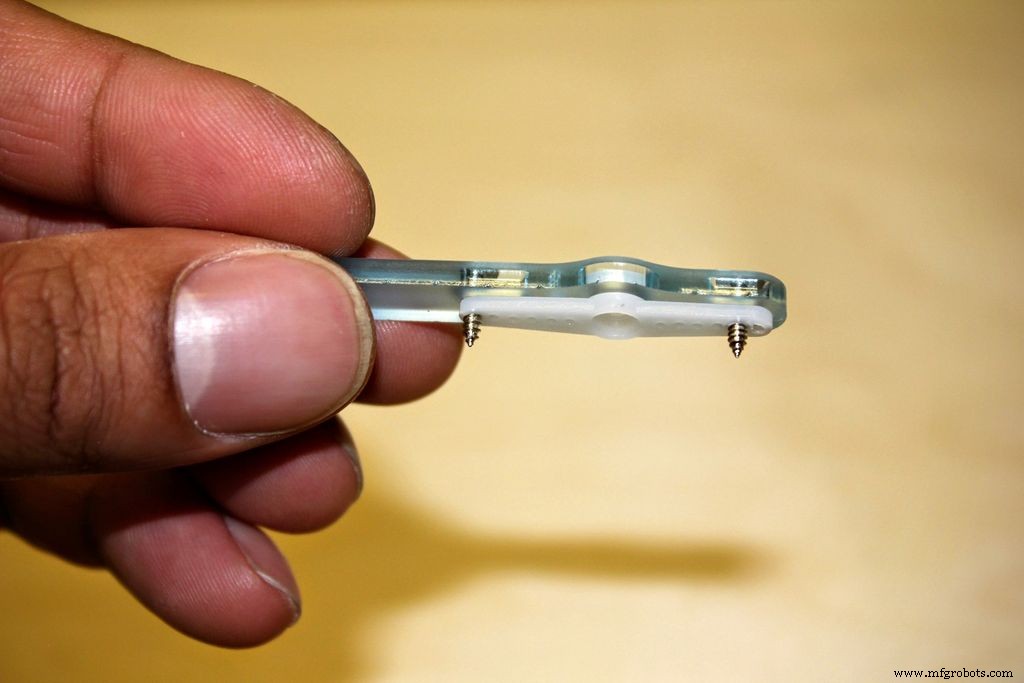
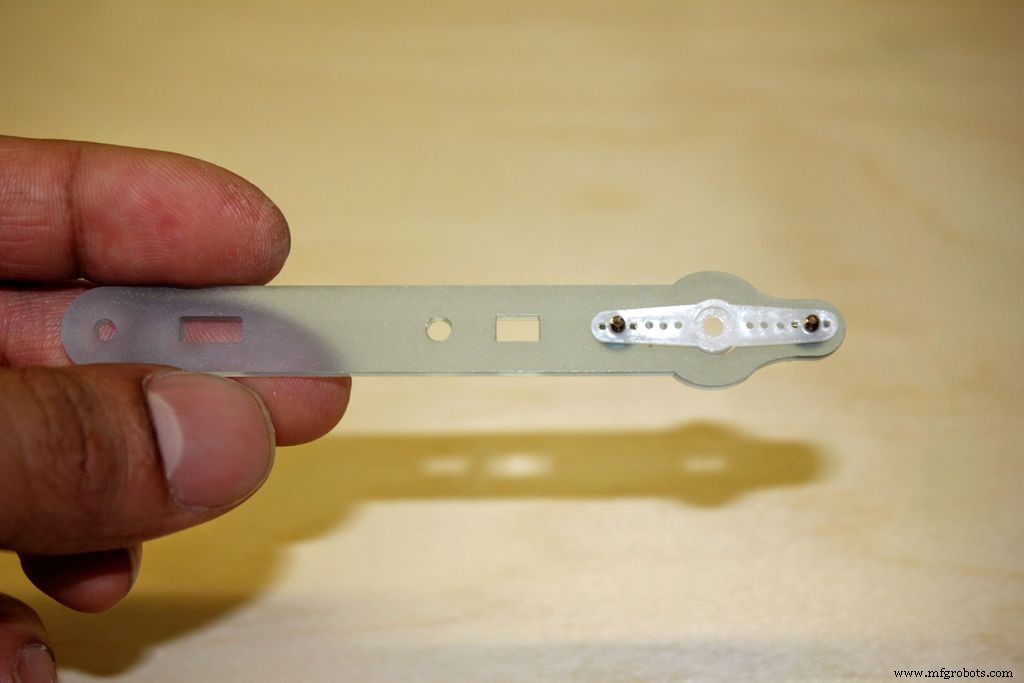
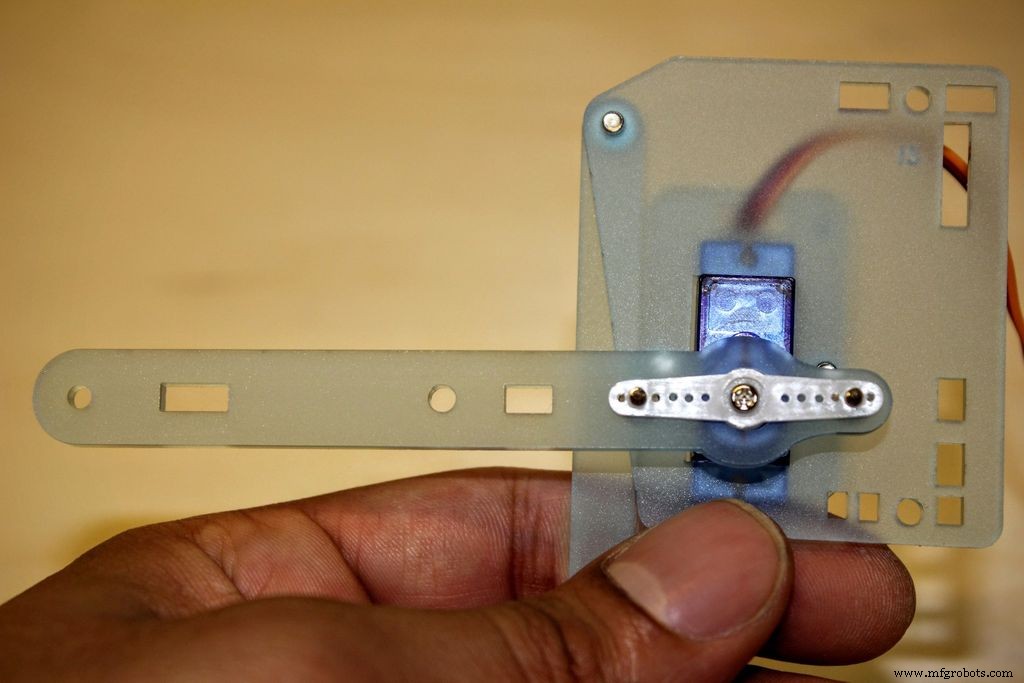
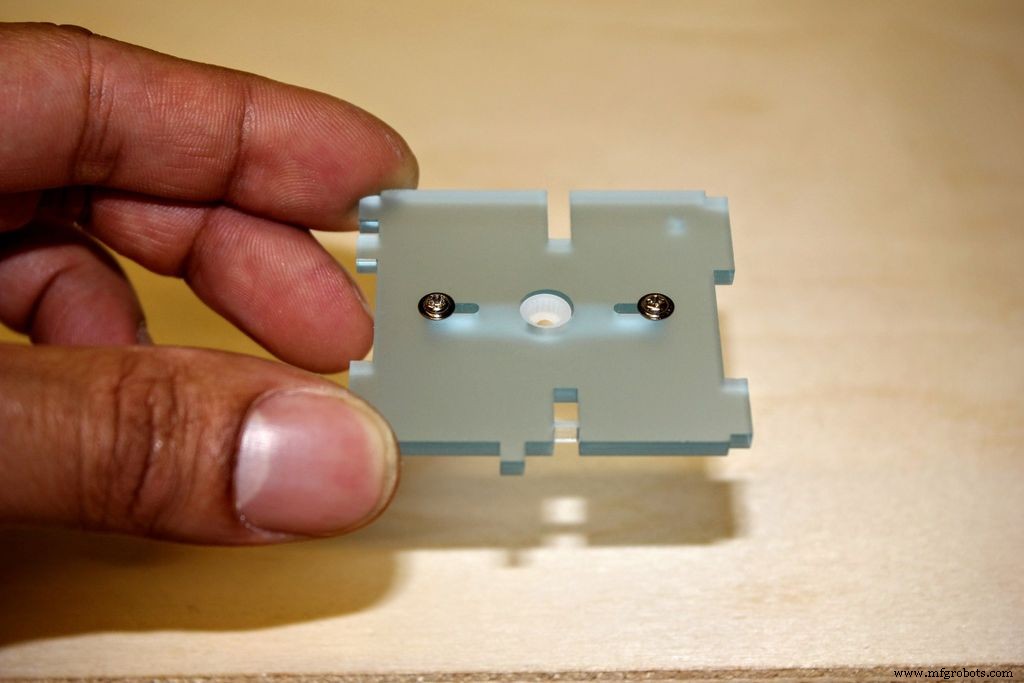
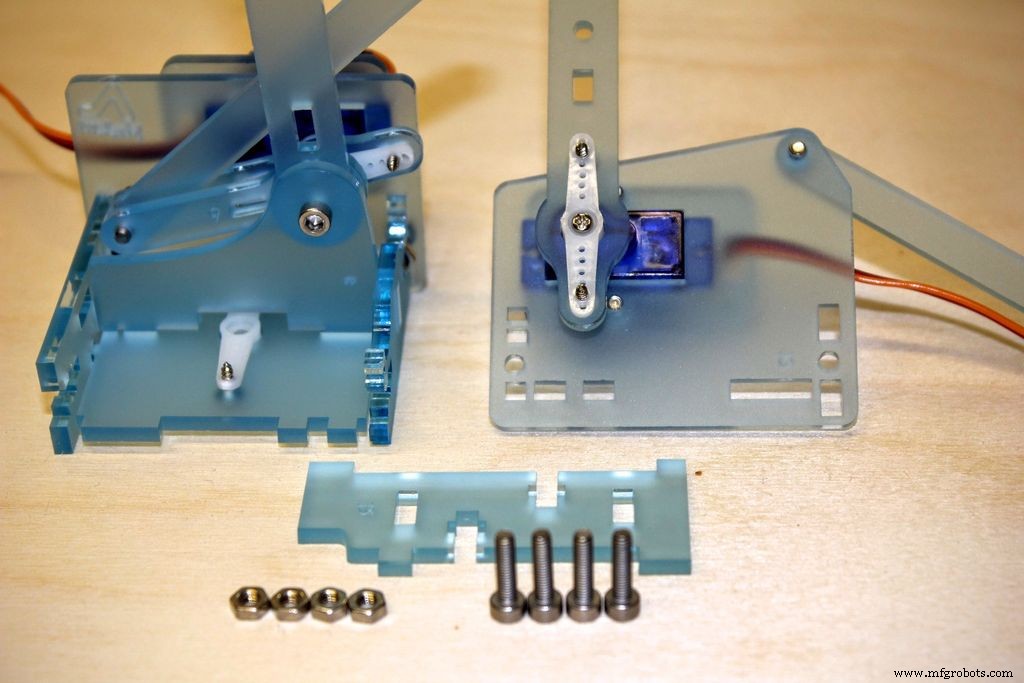
Befestigen Sie nun die Servobefestigung (das weiße Ding, sie werden Hörner genannt) mit den scharfen Schrauben aus dem Servobefestigungspaket am Servoarm (#6). Diese klopfen selbsttätig in das weiße Servohorn aus Kunststoff. Sie können etwas knifflig sein, also seien Sie hier bitte vorsichtig. Wenn Sie mit einem Kind bauen, dann ist dies rechtzeitig, an dem Sie sich beteiligen möchten.
Befestigen Sie die Servobefestigung wie abgebildet an Ihrem kalibrierten Servo. Sie sollte parallel zur längsten Seite von Teil Nr. 4 sein und die Linien, die Sie zuvor gezeichnet haben, sollten noch übereinstimmen. Mit der kleinen Maschinenschraube aus dem Servopaket befestigen Sie es am Servo, aber ziehen Sie es nicht zu fest an!
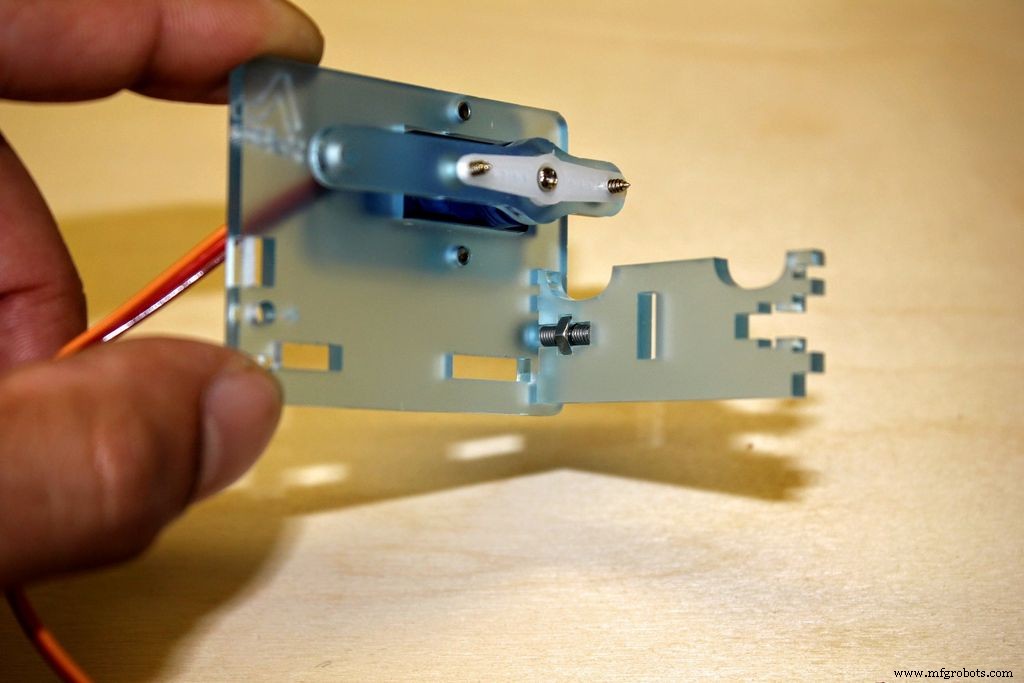
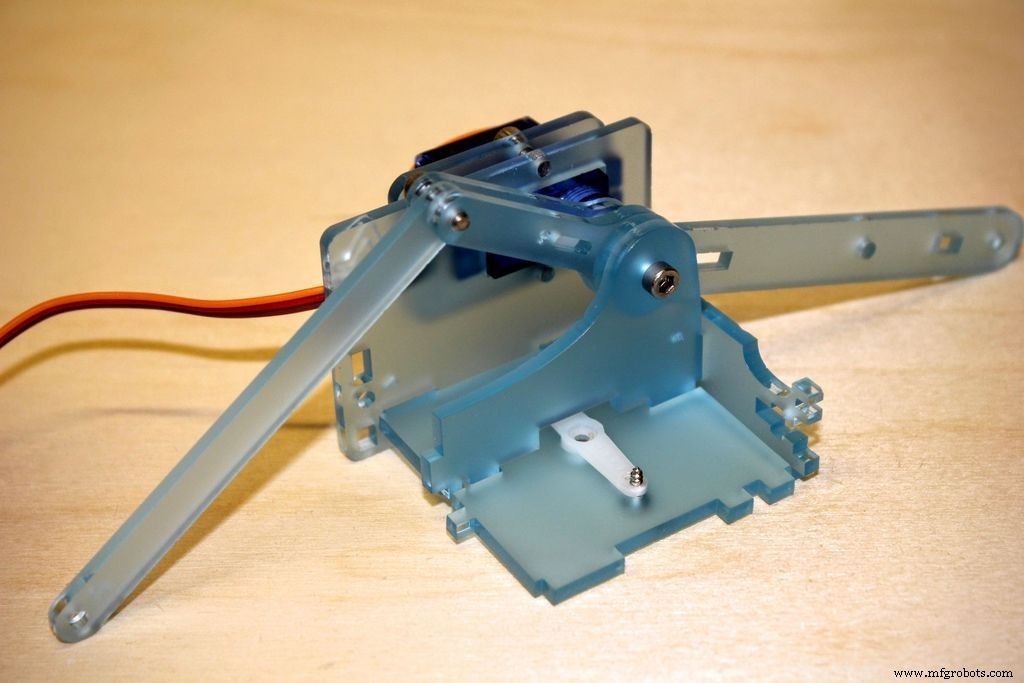
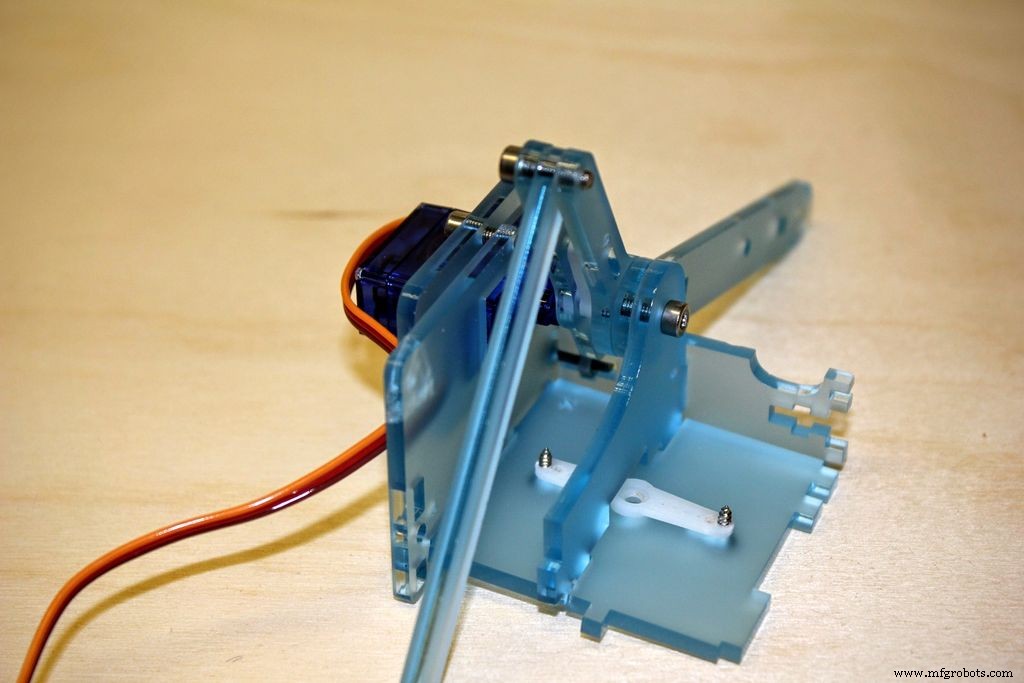
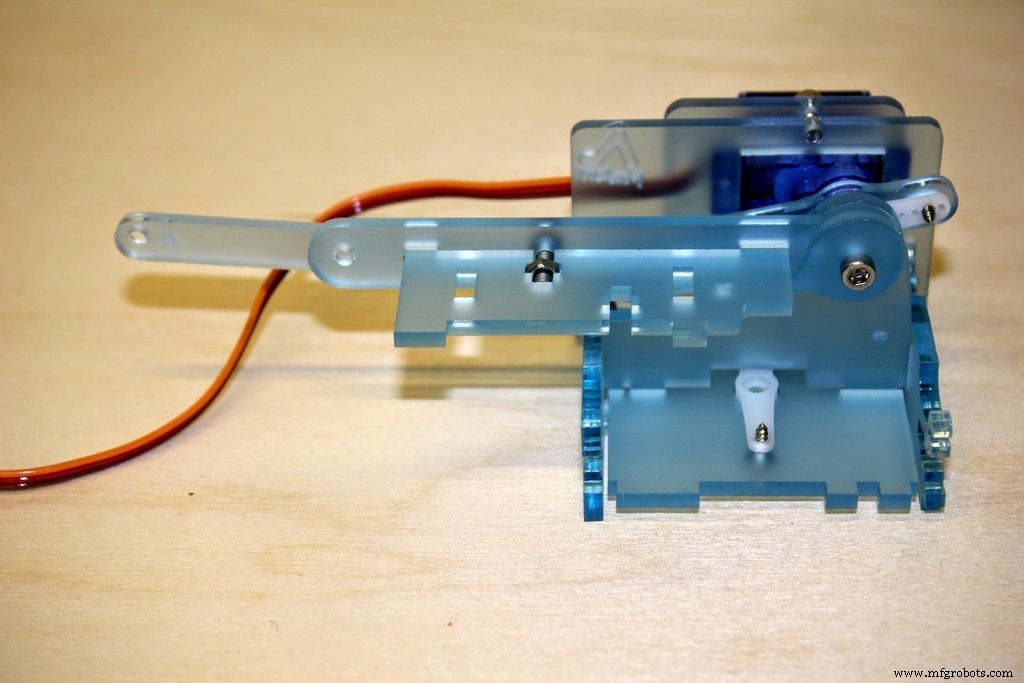
Schritt 5:Rechte Seite
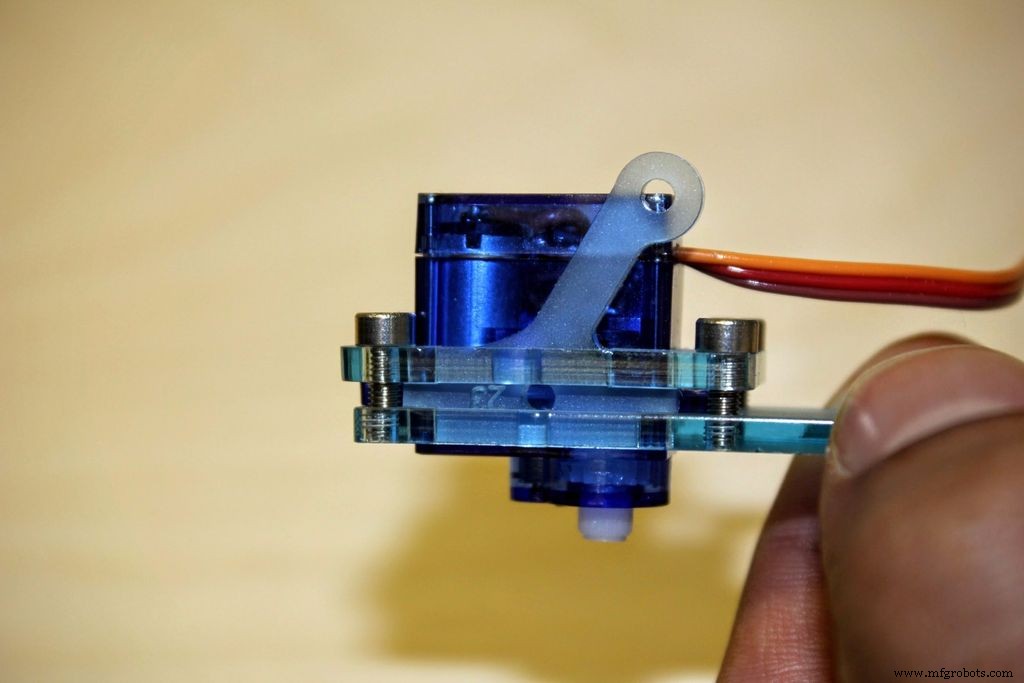
Die Teile, die wir hier haben wollen, sind:
#5, #12, #13, #17, zwei 8-mm-Schrauben, eine 6-mm-Schraube, das rechte Servo und ein Servo-Befestigungspaket.
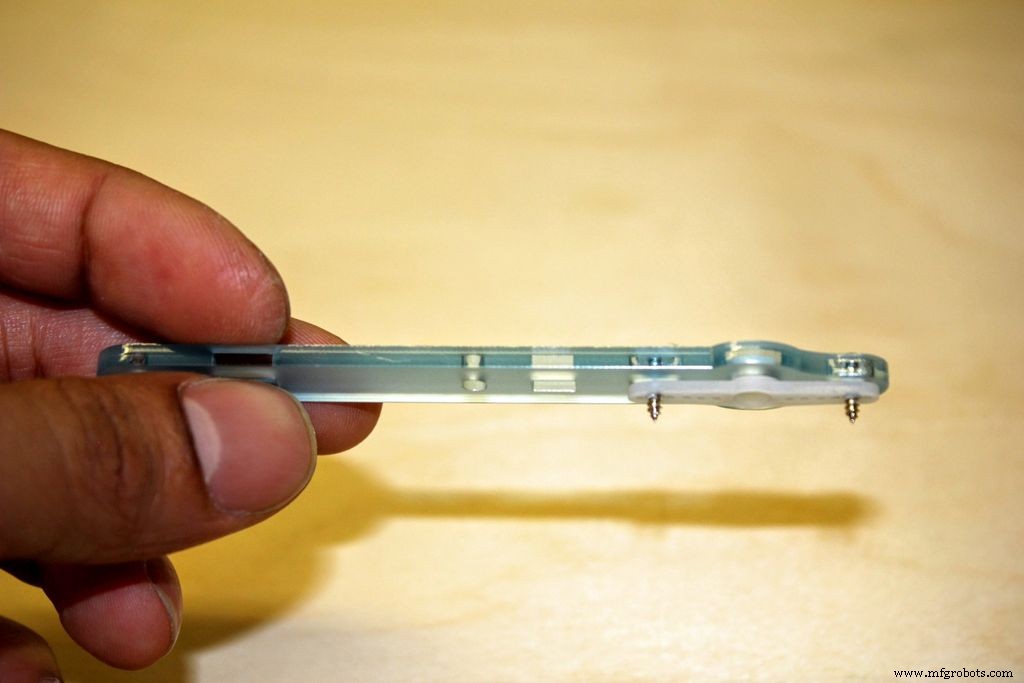
Fädeln Sie das Servo durch die Manschette und das Kabel durch das Kabel sauber wie zuvor mit den 8mm Schrauben an der Seitenplatte befestigen, wieder darauf achten, dass die Platte nicht durch zu starkes Anziehen bricht. Befestigen Sie das weiße Servohorn wie zuvor mit den scharfen Schrauben am Servoarm (#13). Befestigen Sie dies am Servo mit dem Arm im 90-Grad-Winkel zur längsten Seite der Seitenplatte. Wieder sollten die schwarzen Linien, die du gemacht hast, übereinander liegen.
Schließlich befestigen Sie in dieser Phase Teil #17 mit der 6-mm-Schraube an der Seitenplatte.
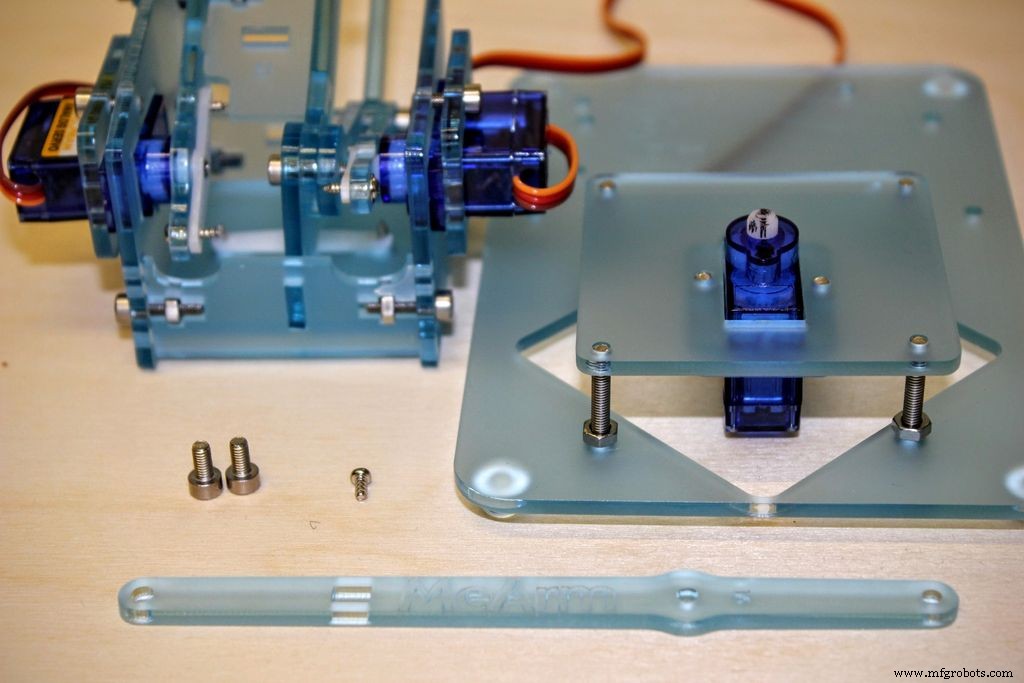
Schritt 6:Bauen Sie die Mitte
Diese Teile verbinden den linken und rechten Abschnitt miteinander. Wir nennen sie die Basis und das Schwein.
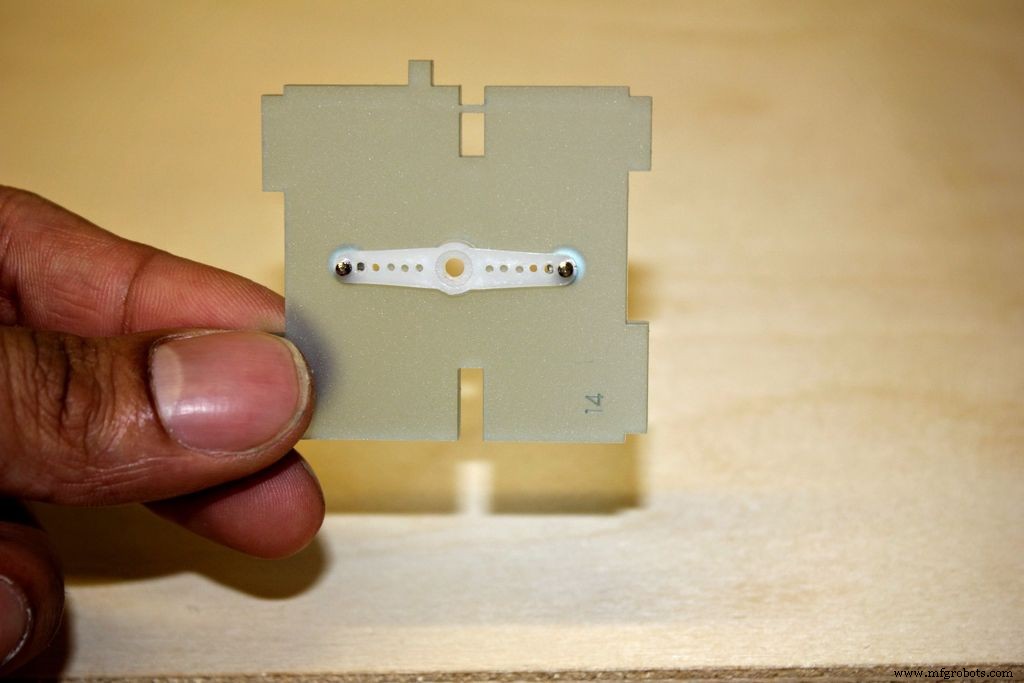
Für die Basis finden Sie Teil #14 und ein Servo-Befestigungspaket. Achten Sie sorgfältig auf die Ausrichtung und befestigen Sie das Servohorn mit den scharfen Schrauben. Bieten Sie es in dieser Phase bis zum linken Seitenteil an, um zu sehen, ob Sie die Dinge richtig herum haben. Das Poka-Yoking sollte dir den Weg hierher zeigen.
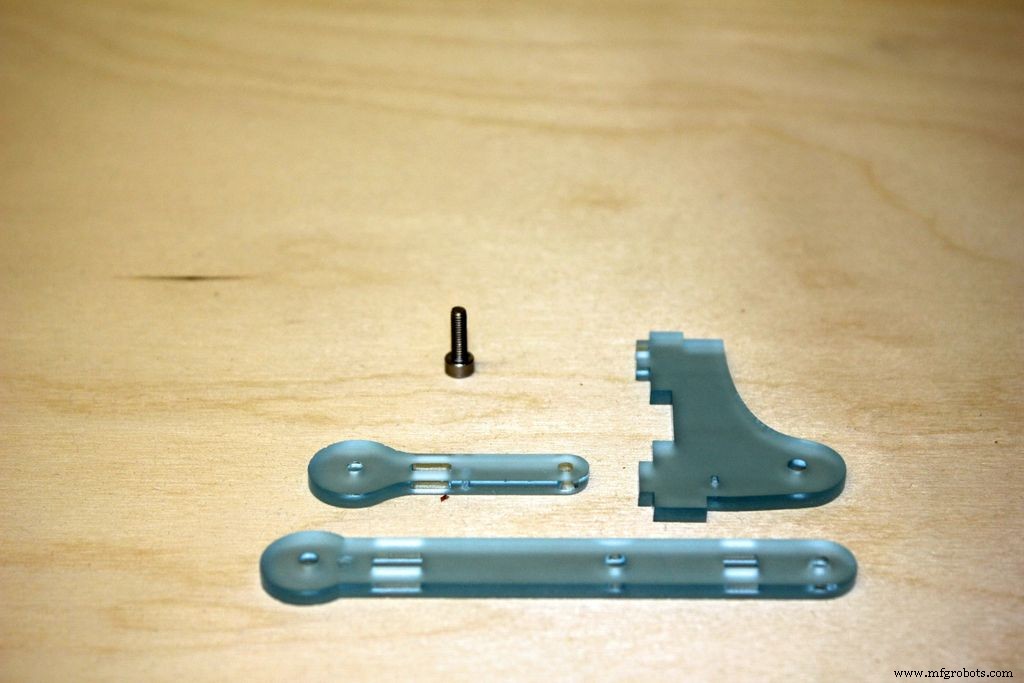
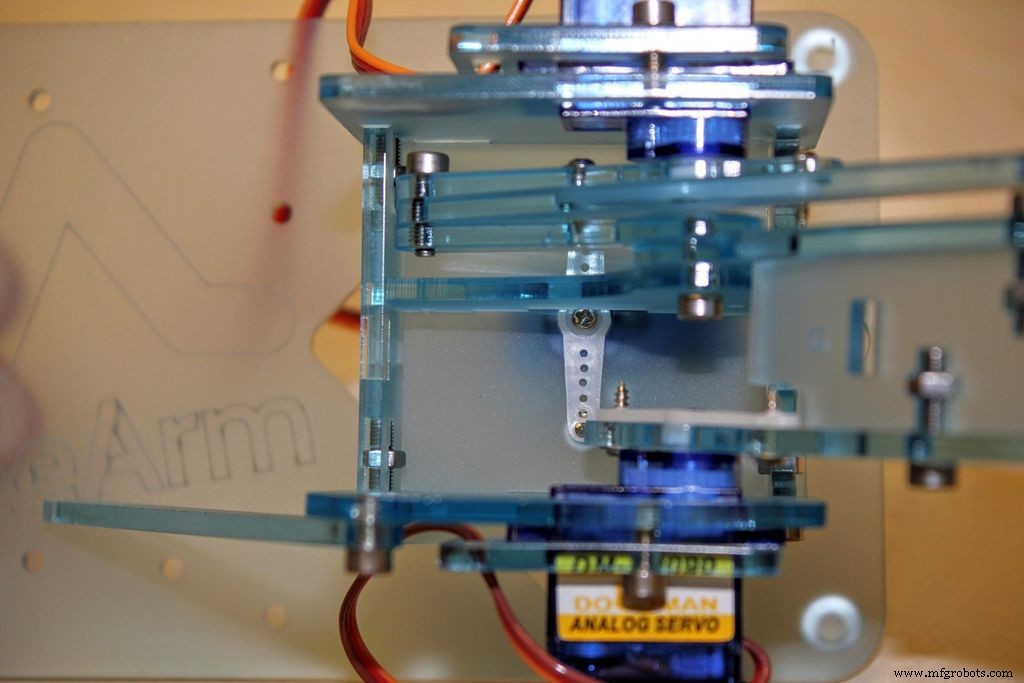
Für das Schwein finden Sie die Teile #8, #9, #10 und eine 10mm Schraube. Schrauben Sie sie in der gezeigten Reihenfolge zusammen, die #9, #10, #8 sein sollte, wobei die Schraube von der Seite #8 kommt und sich selbst in #9 schneidet. Tut mir leid, dass die Reihenfolge verwirrend ist, aber dies ist ehrlich gesagt das erste Mal, dass ich das mit den Zahlen aufgeschrieben habe! Wichtig ist, dass sich diese geradlinig um die Achse (die Schraube) bewegen und sich frei bewegen. Wenn sie sich nicht gerade bewegen, dann schrauben Sie sie ab, halten Sie sie zusammen und schrauben Sie sie wieder ein, damit sie alle so parallel wie möglich sind.
Schritt 7:Von links nach Mitte
Jetzt wollen wir damit beginnen, den linken und rechten Teil mit den Mittelteilen zusammenzubringen.
Befestigen Sie zuerst die linke Baugruppe mit einer 12-mm-Schraube und -Mutter an Teil #7. Am einfachsten geht dies, indem Sie die 12-mm-Schraube durch die linke Baugruppe schieben und die Mutter um eine halbe Umdrehung oder so drehen. Setzen Sie den Schlitz in Teil #7 über die Mutter und beginnen Sie, die Schraube festzuziehen. Nicht zu fest anziehen.
Sie sollten den Schlitz für das Schwein auf Teil #7 (die vordere Strebe) sehen. Setzen Sie den Molch in den Schlitz ein, stecken Sie dann das Basisteil in die Schlitze an der linken Baugruppe und hebeln Sie nach oben, um die Schlitze am Molch zu verbinden. Überprüfen Sie das Servohorn hier noch einmal, wenn Sie es auf den Kopf stellen, werden Sie später wirklich genervt sein.
Wenn der Molch an Ort und Stelle ist, können Sie einen Hebel (#17), einen optionalen Abstandshalter (#20) am Servohebel (#6) und den Hebel am Molch (#9) zusammen mit einer 12mm oder 10mm Schraube befestigen, je nachdem ob du brauchst den abstandshalter. Die hier gezeigten Doman Servos benötigen keinen Spacer, aber die neuesten Servos, die wir verwenden, tun es. Zu diesem Zweck gibt es Ersatzteile in unserem Paket.
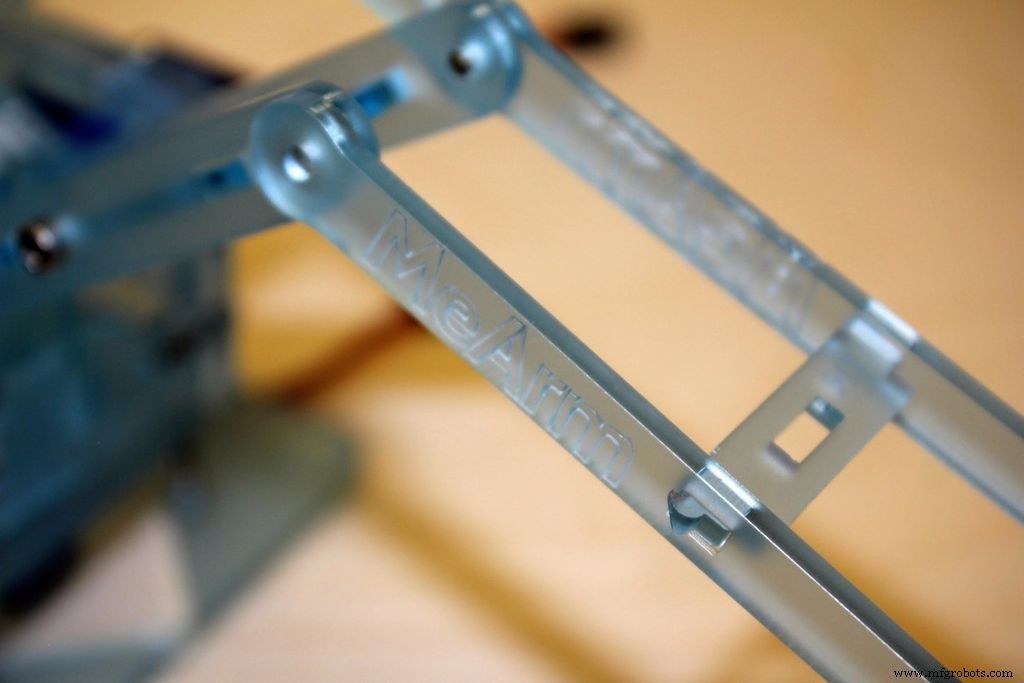
Befestigen Sie nun die hintere Strebe, Teil #11, mit einer 12mm Schraube und Mutter wie an der vorderen Strebe. Es sollte über die Rückseite des Schweins und auch über die Noppe auf der Grundplatte ragen. Ziehen Sie dies fest, aber lassen Sie es etwas locker, da die Einstellung praktisch ist, wenn Sie das rechte Teil zusammenfügen.
Schritt 8:Rechts anbringen
Jetzt verbinden wir die rechte Seite unserer komplexen Baugruppe, dazu gehört auch das Anlegen des Gurtbandteils #15.
Befestigen Sie Teil Nr. 15 an Teil Nr. 10 (am Molch) mit einer 12-mm-Schraube und -Mutter.
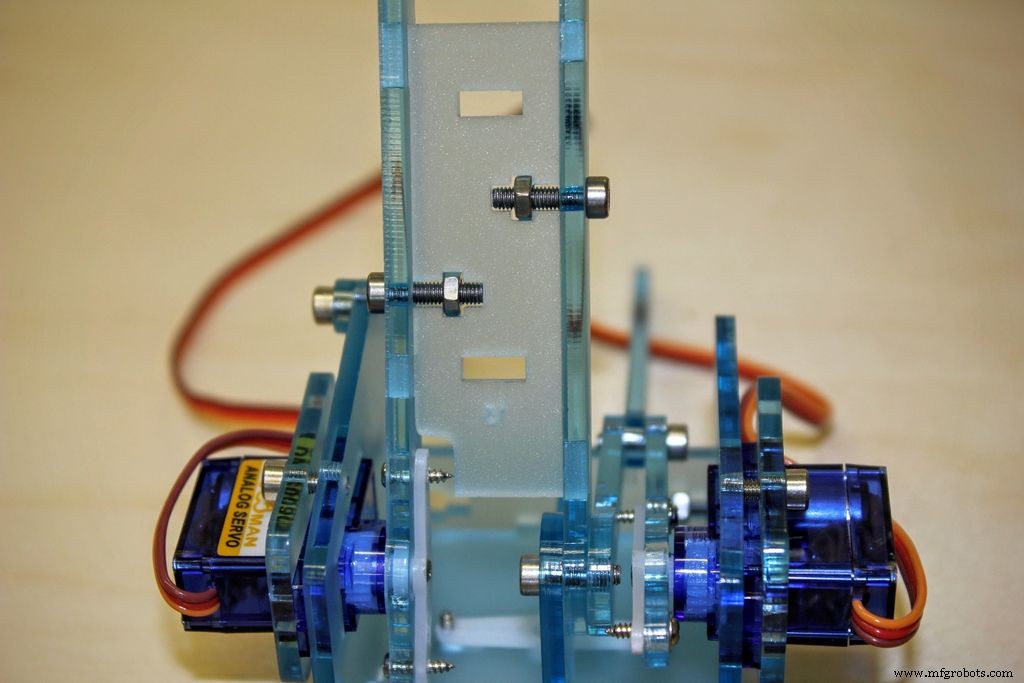
Jetzt kommt das Anbringen der rechten Seite an den Rest der Baugruppe. Sie können die 12-mm-Schrauben und -Muttern durch die rechte Seite stecken, bevor Sie versuchen, die Teile zusammenzufügen, oder Sie können sie weglassen und danach wieder aufsetzen. Hier versuchen Sie, mehrere Teile gleichzeitig in Slots zu bekommen, und es kann schwierig sein
Nehmen Sie sich Zeit und haben Sie bitte Geduld. Dieser Schritt ist der schwierigste im gesamten Build. Sobald Sie dies getan haben, wird es einfacher, versprochen!
Schritt 9:An der Basis befestigen, linken Unterarm hinzufügen
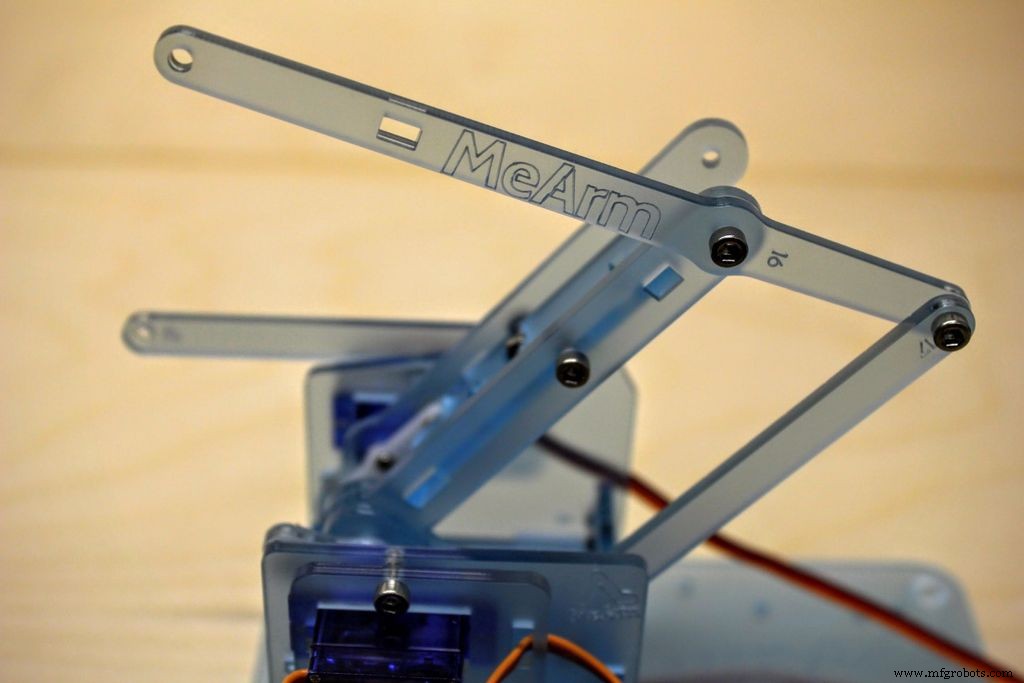
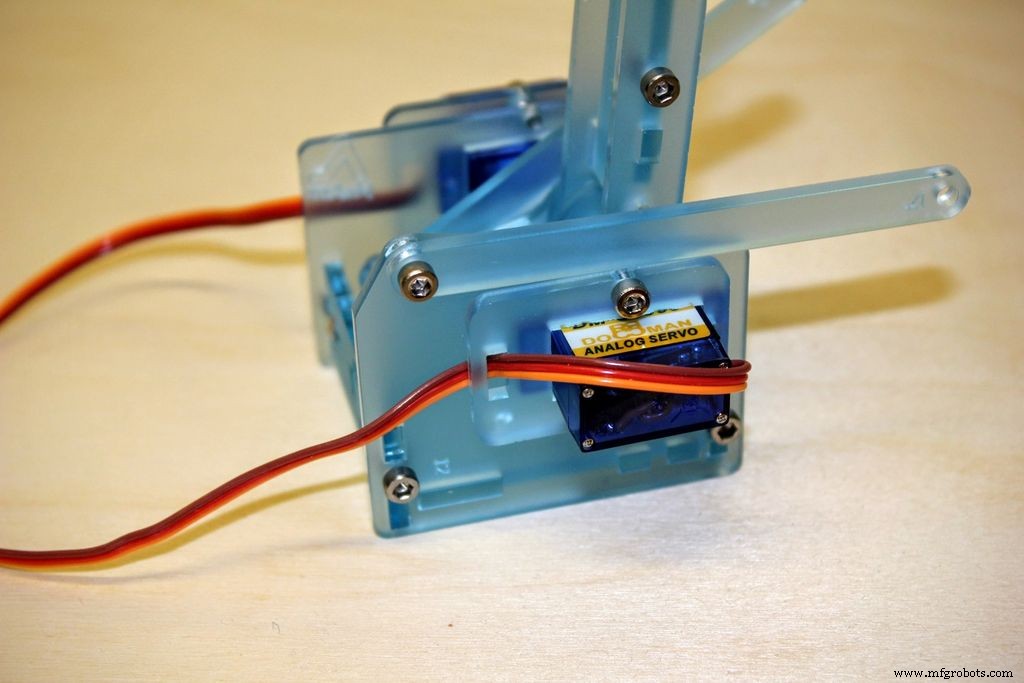
Jetzt haben wir die schöne Mittelbaugruppe fertig und können sie mit der Basis verschrauben.
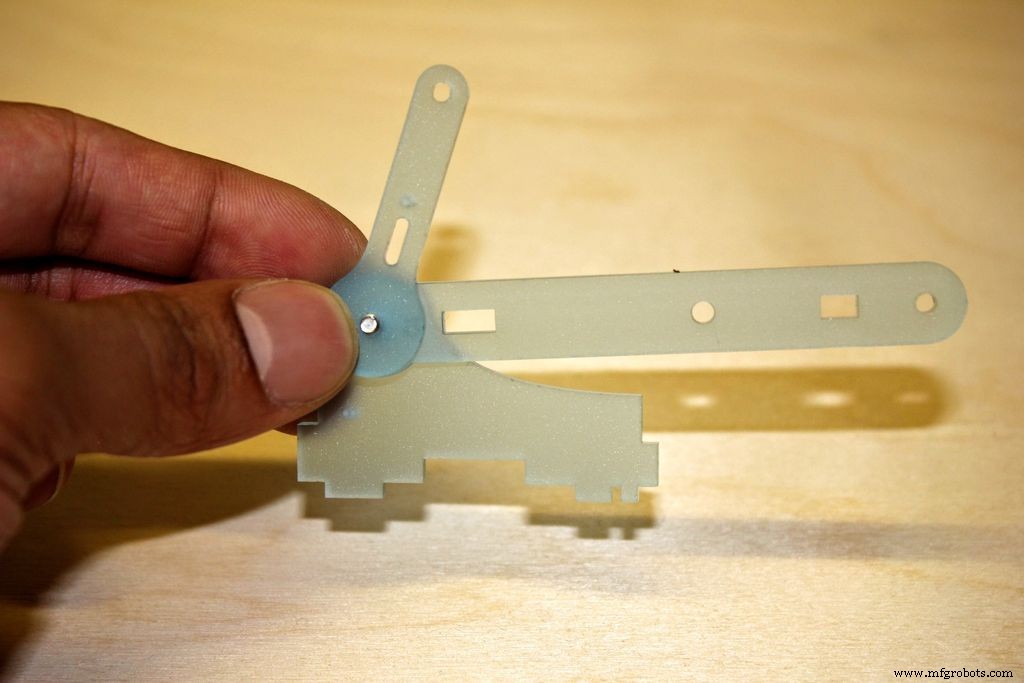
Dazu muss das Servohorn mit dem mittleren Servo verbunden und mit einer Schraube befestigt werden.
Jetzt können wir Teil #16 mit zwei 6-mm-Schrauben hinzufügen. Dies wird auf Teil # 10 und auf # 17 geschraubt. Mit diesem neuen Teil sollten Sie das Servo leicht bewegen können!
Schritt 10:Rechter Unterarm


Als nächstes bauen wir den rechten Unterarm.
Das erste, was Sie tun müssen, ist Teil #18 auf den linken Unterarmteil, den Sie gerade befestigt haben, und dann auf den rechten Unterarm zu haken, den wir Teil #31 nennen werden, da er anscheinend nicht nummeriert ist!
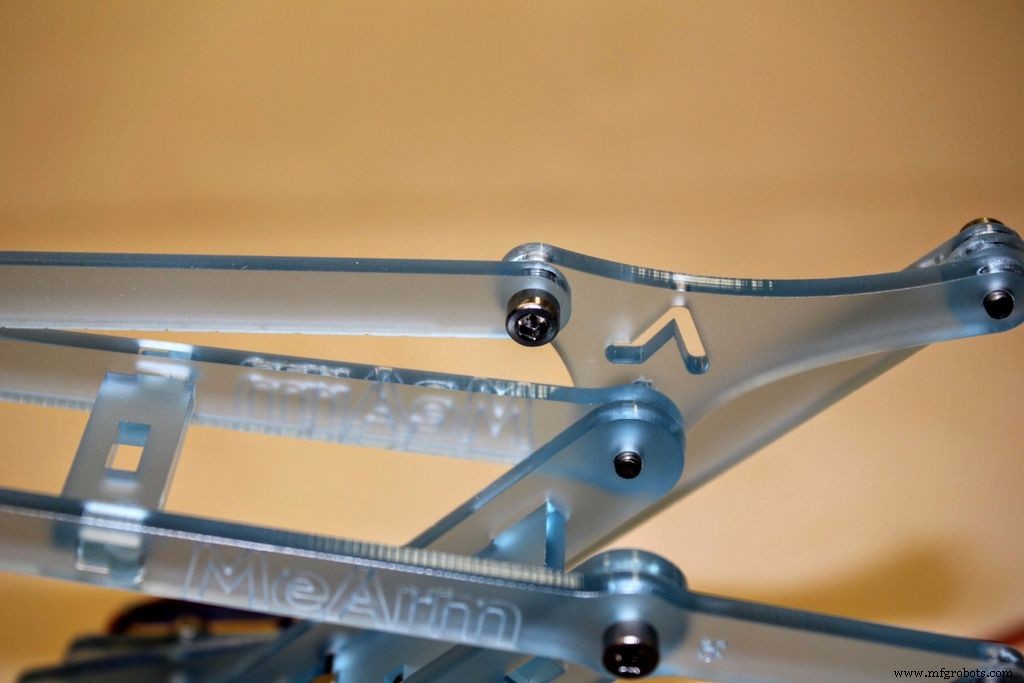
Befestigen Sie das dreieckige Teil # 19 an Teil # 31 und an Teil # 13 (das Bit, das am Servo befestigt ist) mit einer 10 mm Schraube. Ziehen Sie nicht zu fest an, da wir alle diese Teile brauchen, um sich frei bewegen zu können.
Bringen Sie die Rückseite von Teil #19 an Teil #17 an der rechten Seitenplatte an, verwenden Sie eine 10mm Schraube und einen Abstandshalter (#20) dazwischen.
Befestigen Sie dann das letzte Teil #17 mit einer 6-mm-Schraube an der Innenseite der Vorderseite von Teil #19.
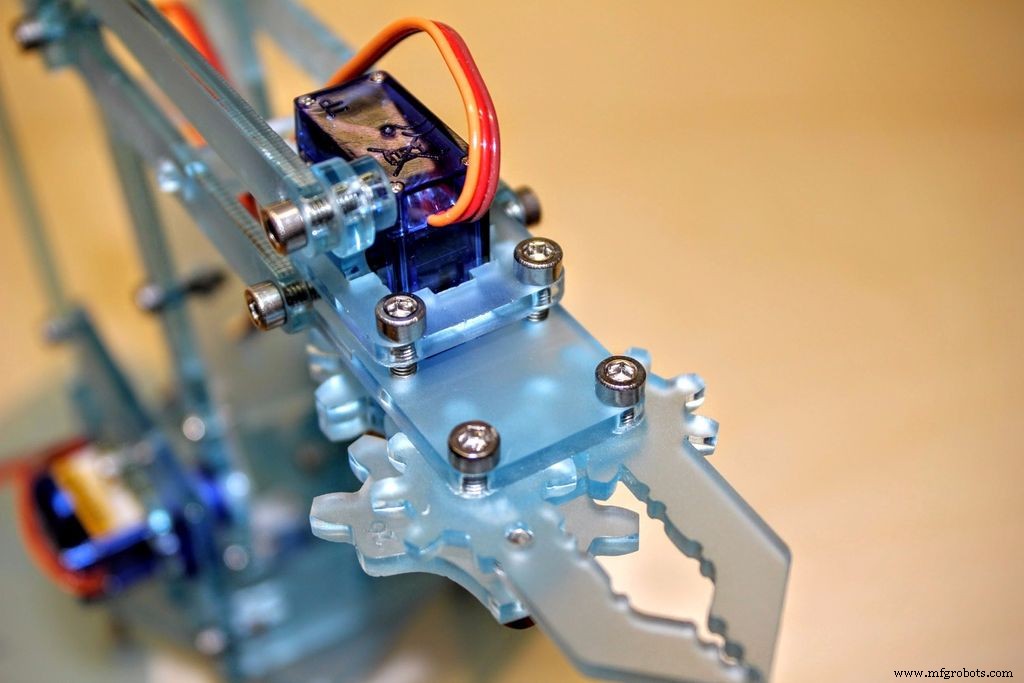
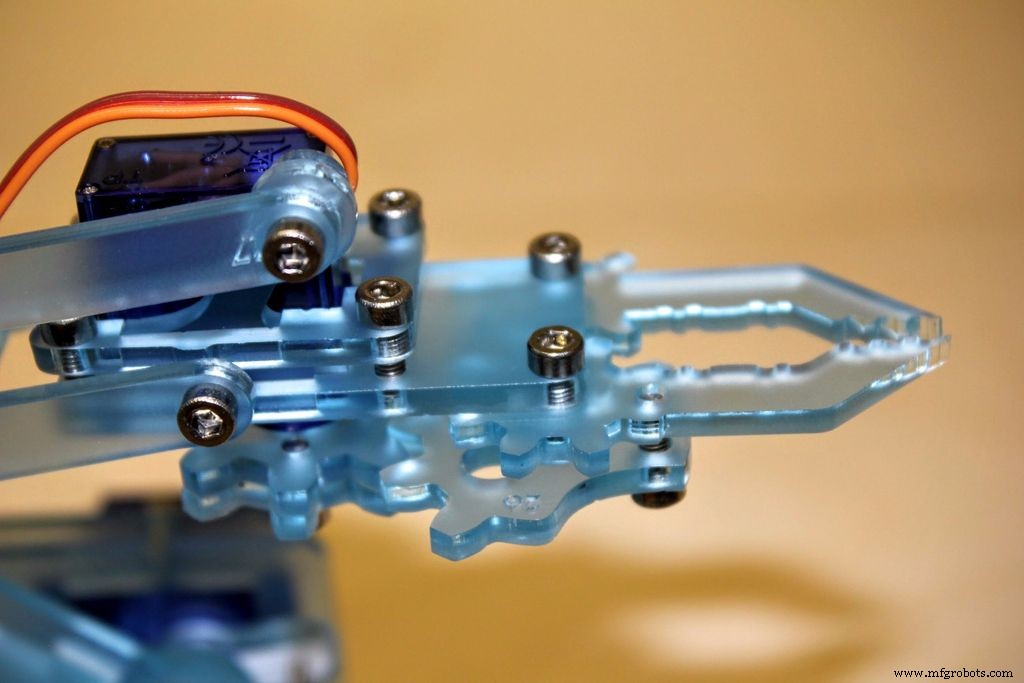
Schritt 11:Baue die Klaue!
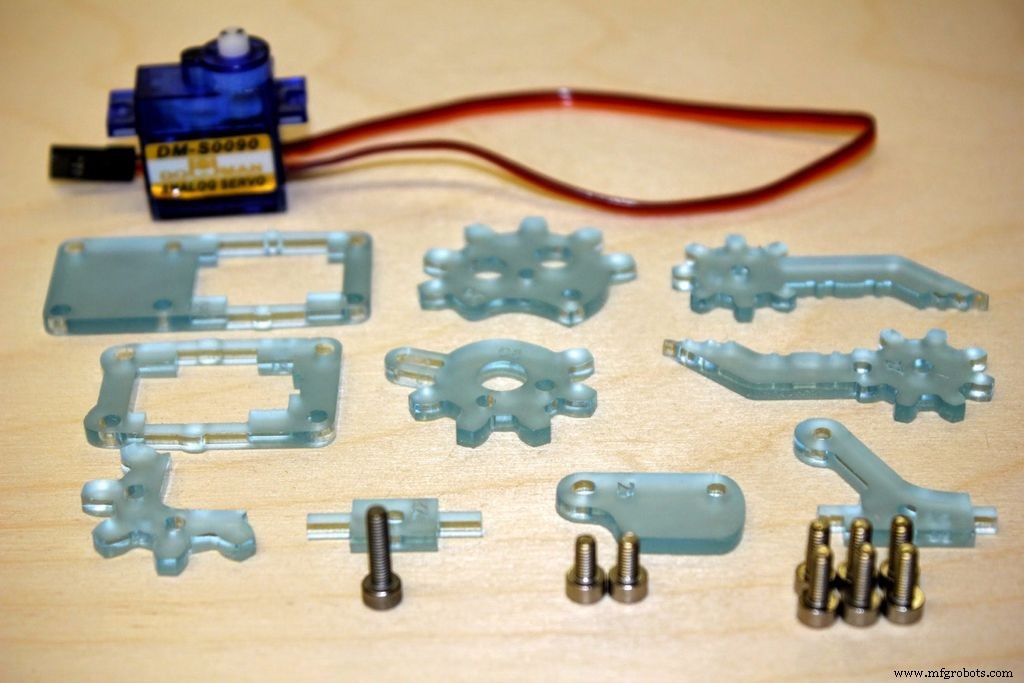
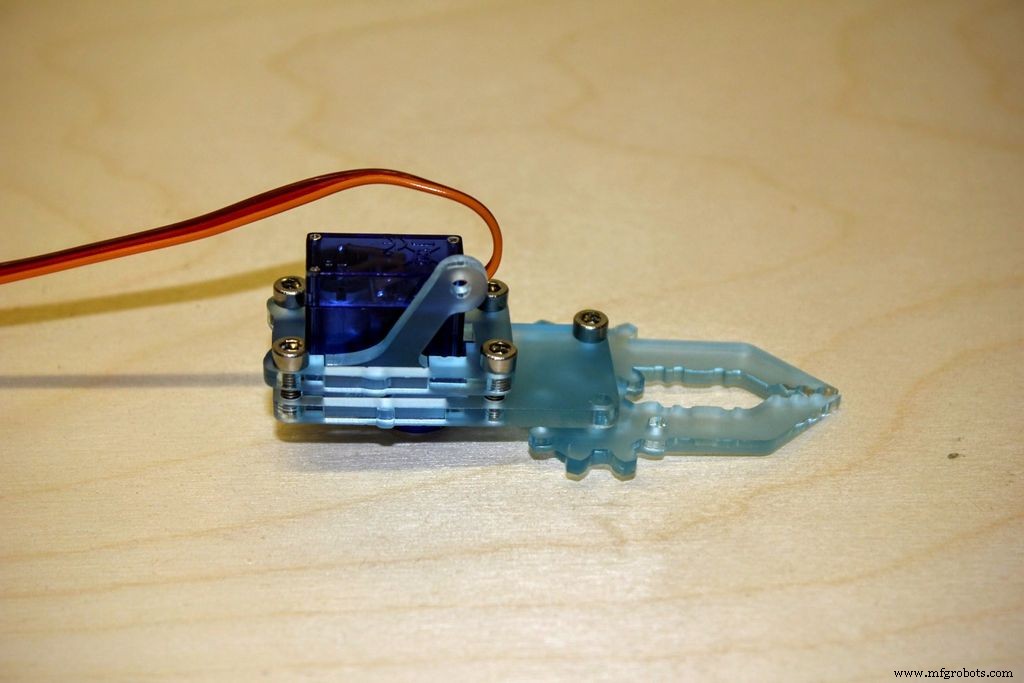
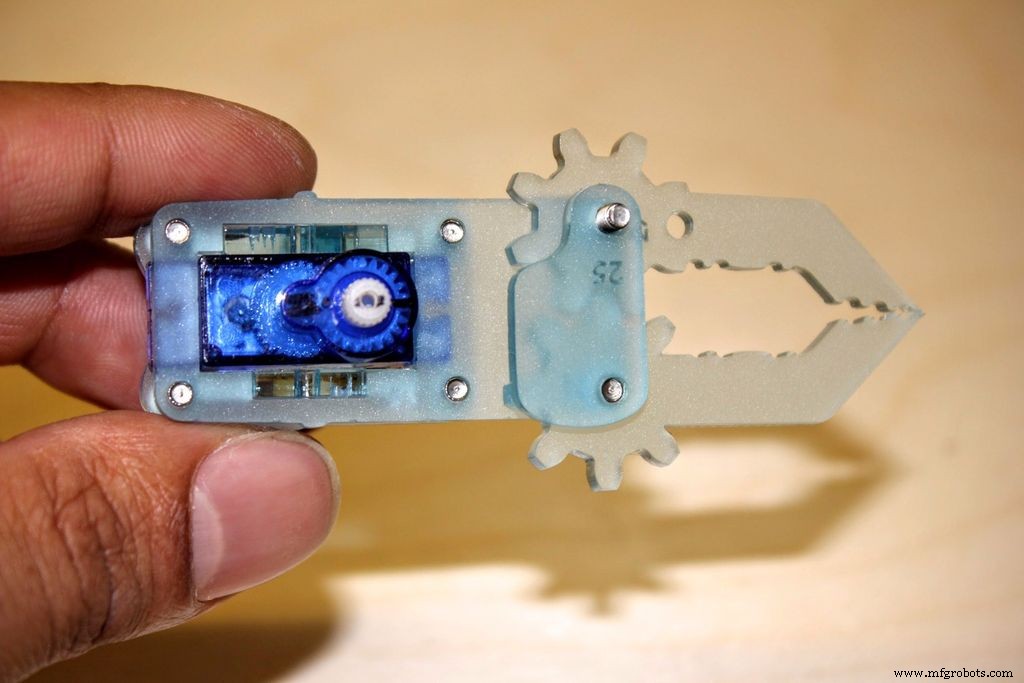
Fädeln Sie das Servo durch den restlichen Kragen #21. Setzen Sie die Teile #22 und #23 in die seitlichen Schlitze des Servos und Teil #21 ein und befestigen Sie sie mit Teil #24 mit vier 8-mm-Muttern. Seien Sie noch einmal vorsichtig, wir haben es fast geschafft, Sie wollen nichts kaputt machen.
Die nächsten Teile werden ein wenig ungesichert sein, bis die letzte Schraube an Ort und Stelle ist, also keine Sorge, wenn Sie jetzt etwas fallen lassen. Befestigen Sie Teil #28 durch das linke Loch an der Kopfbaugruppe mit einer 8-mm-Schraube in Teil #25. Dann kämmen Sie die Zahnräder von Teil #27 und stecken Sie eine 12-mm-Schraube durch die Kopfbaugruppe und Teil #25. Das ist noch nicht sicher, hält es aber zusammen.
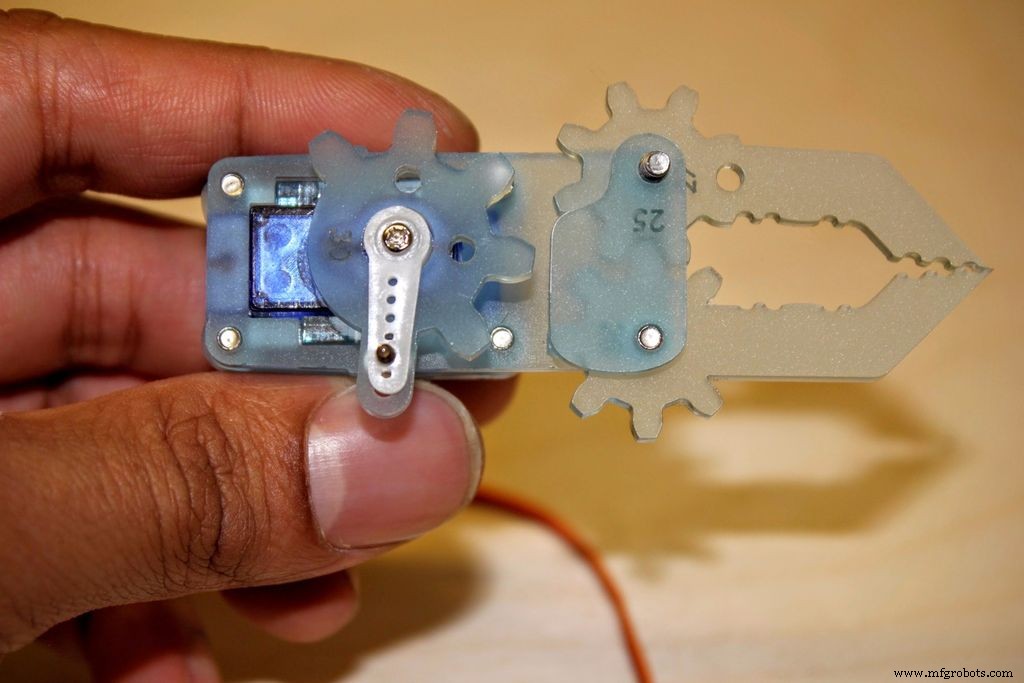
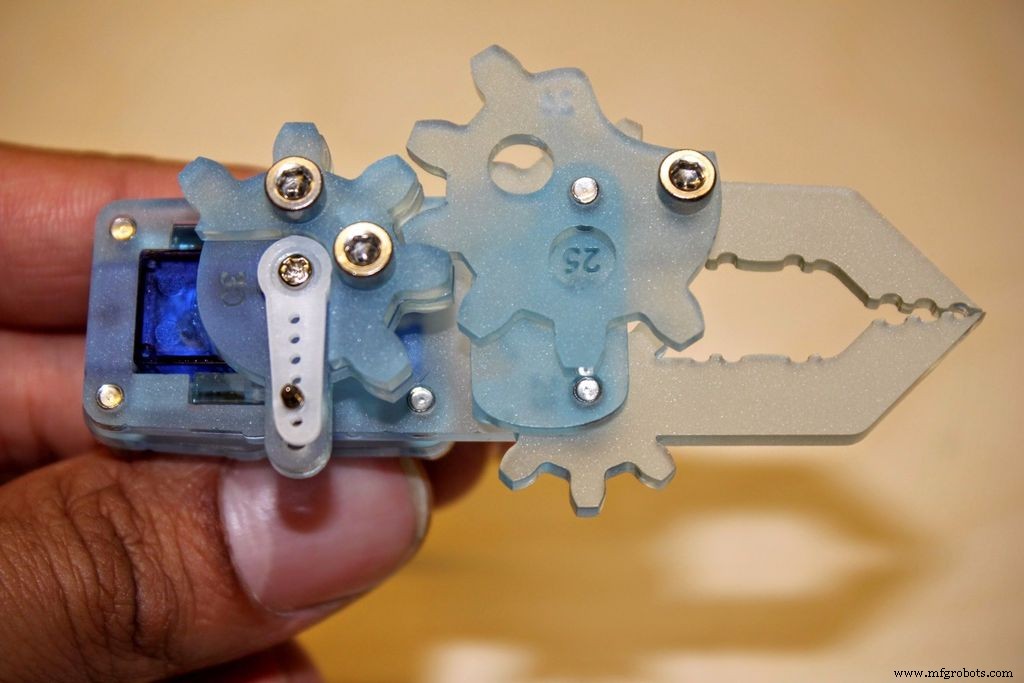
Befestigen Sie ein Servohorn an Teil #30 und befestigen Sie es mit der Maschinenschraube am Servo. Befestigen Sie #29 an #30 mit zwei 6-mm-Schrauben.
Jetzt können Sie #26 an der losen 12-mm-Schraube befestigen und mit einer 8-mm-Schraube am zusätzlichen Loch in Teil #27 befestigen.
Schritt 12:Kopf hinzufügen
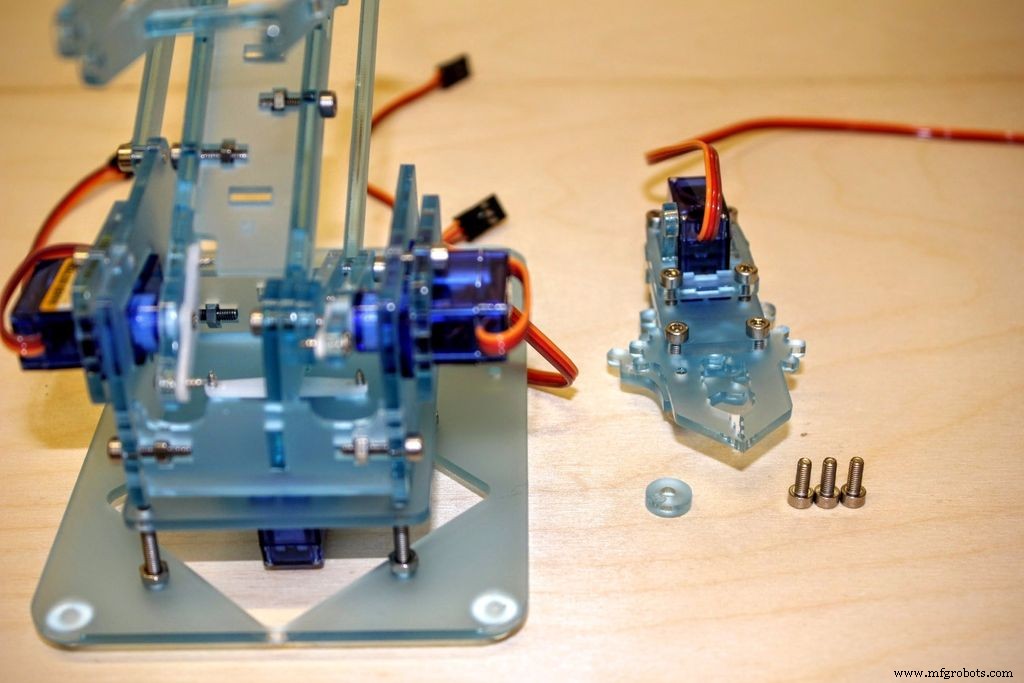
Der letzte Teil ist das Anbringen des Kopfes.
Dieser wird mit zwei 8mm Schrauben durch die Unterarme in die Teile #22 und #23 am Kopf befestigt. Es könnte das Lösen der 8-mm-Schrauben an der Kopfservo-Klemme erleichtern.
Jetzt einschalten und spielen!
Schritt 13:Fehlerbehebung
Dieser Abschnitt wird im Laufe der Zeit mit allgemeinen Problemen gefüllt. Wenn Sie eine haben, lassen Sie es uns wissen und wir können sie hinzufügen.
Der linke Servoarm scheint festzustecken. Typischerweise ist dies auf ein steifes Gelenk zurückzuführen. Die Kopfmontage-Befestigung ist diejenige, die die Leute vergessen.
Code
- Unbenannte Datei
Unbenannte DateiArduino
#includeServo Mitte, links, rechts, Klaue; // erstellt 4 "Servoobjekte" void setup () { Serial.begin (9600); mittel.attach(11); // befestigt das Servo an Pin 11 an das mittlere Objekt left.attach (10); // befestigt das Servo an Pin 10 an das linke Objekt right.attach (9); // befestigt das Servo an Pin 9 an das rechte Objekt claw.attach (6); // befestigt das Servo an Pin 6 an das Klauenobjekt} Void loop () {middle.write (90); // Setzt die Servoposition entsprechend dem Wert (Grad) left.write (90); // macht dasselbe right.write(90); // und wieder claw.write(25); // ja, Sie haben es erraten Verzögerung (300); // aktualisiert nicht ständig die Servos, die sie braten können}
Codebender
https://codebender.cc/sketch:148456Kundenspezifische Teile und Gehäuse
Herstellungsprozess
- Gantry-Roboter:Automatisieren Sie Ihre größten Anwendungen
- Whitepaper:So finden Sie Ihr Roboterpotenzial
- Die Bedeutung der Robotersicherheit in Ihrer Fabrikhalle
- Bauen Sie Ihren eigenen Roboterarm:Sollten Sie das Risiko eingehen?
- Zweiarmiger SCARA-Roboter
- Über Ethernet gesteuerter Roboterarm
- Littlearm 2C:Erstellen Sie einen 3D-gedruckten Arduino-Roboterarm
- Webinar:Automatisieren Sie Ihren Prozess mit Techman Robot
- Drehzentrum mit Roboterarm ausgestattet
- Robot kombiniert einen kollaborativen Roboterarm mit einer mobilen Plattform