Über dieses Projekt
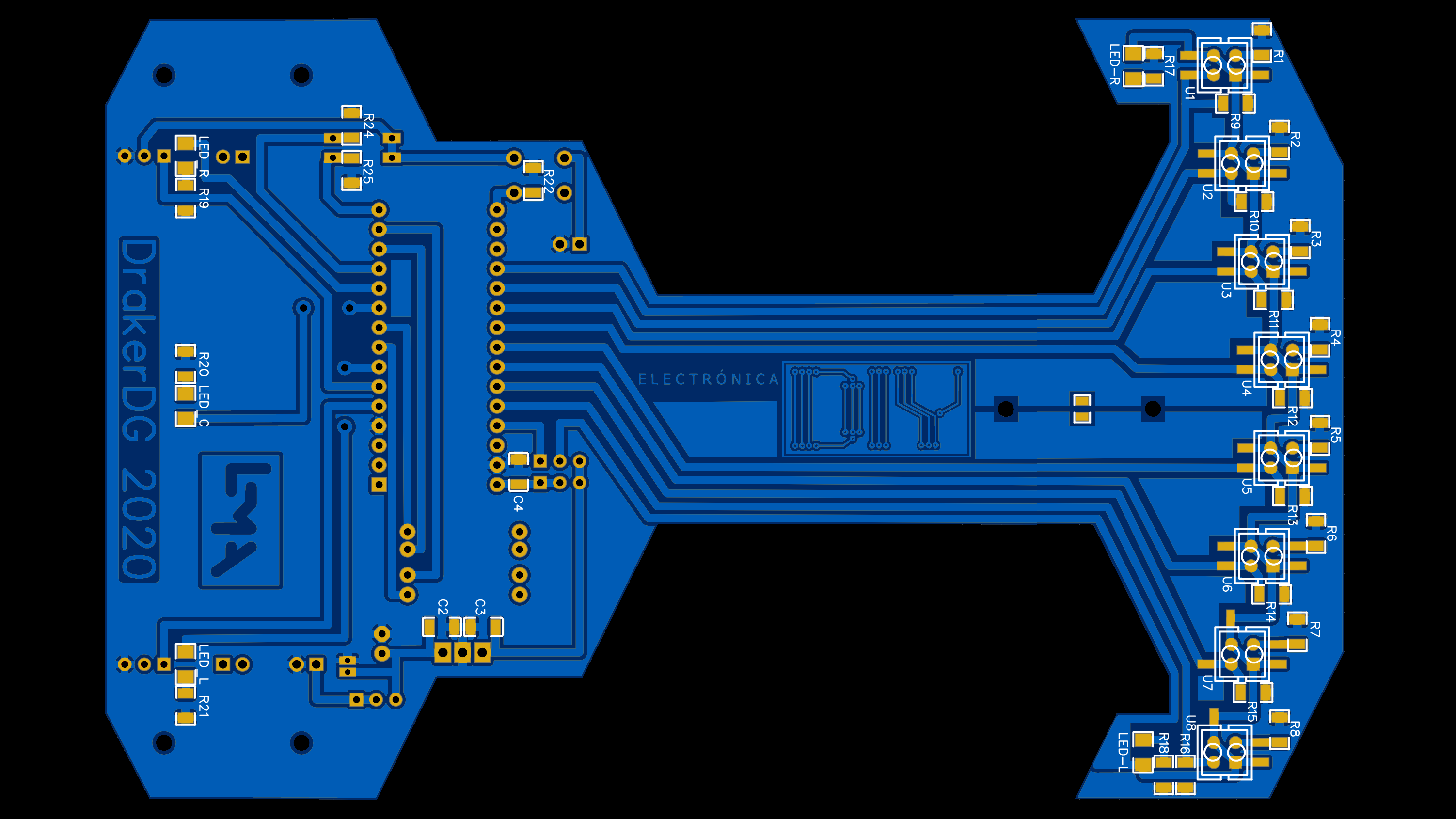
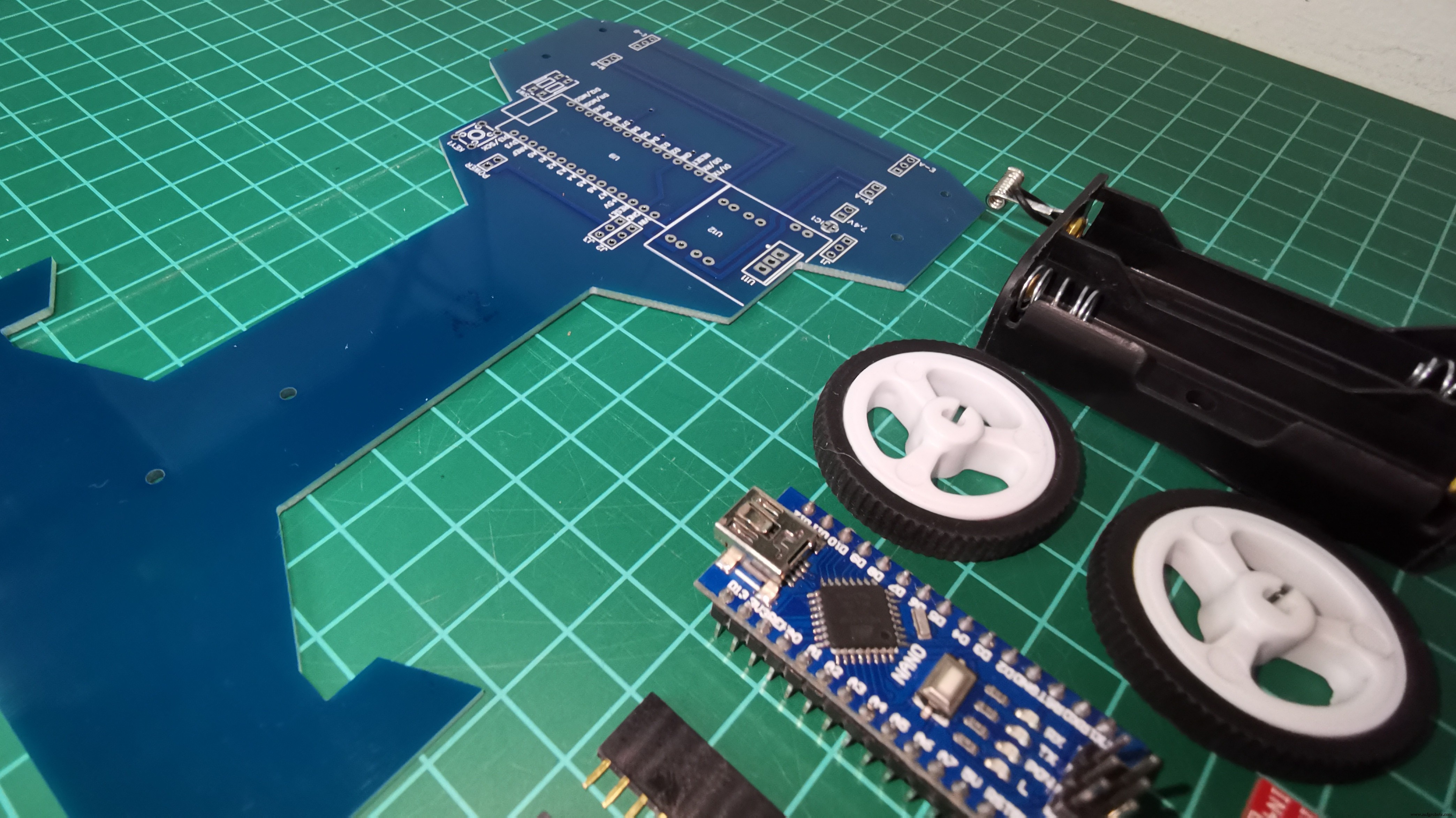
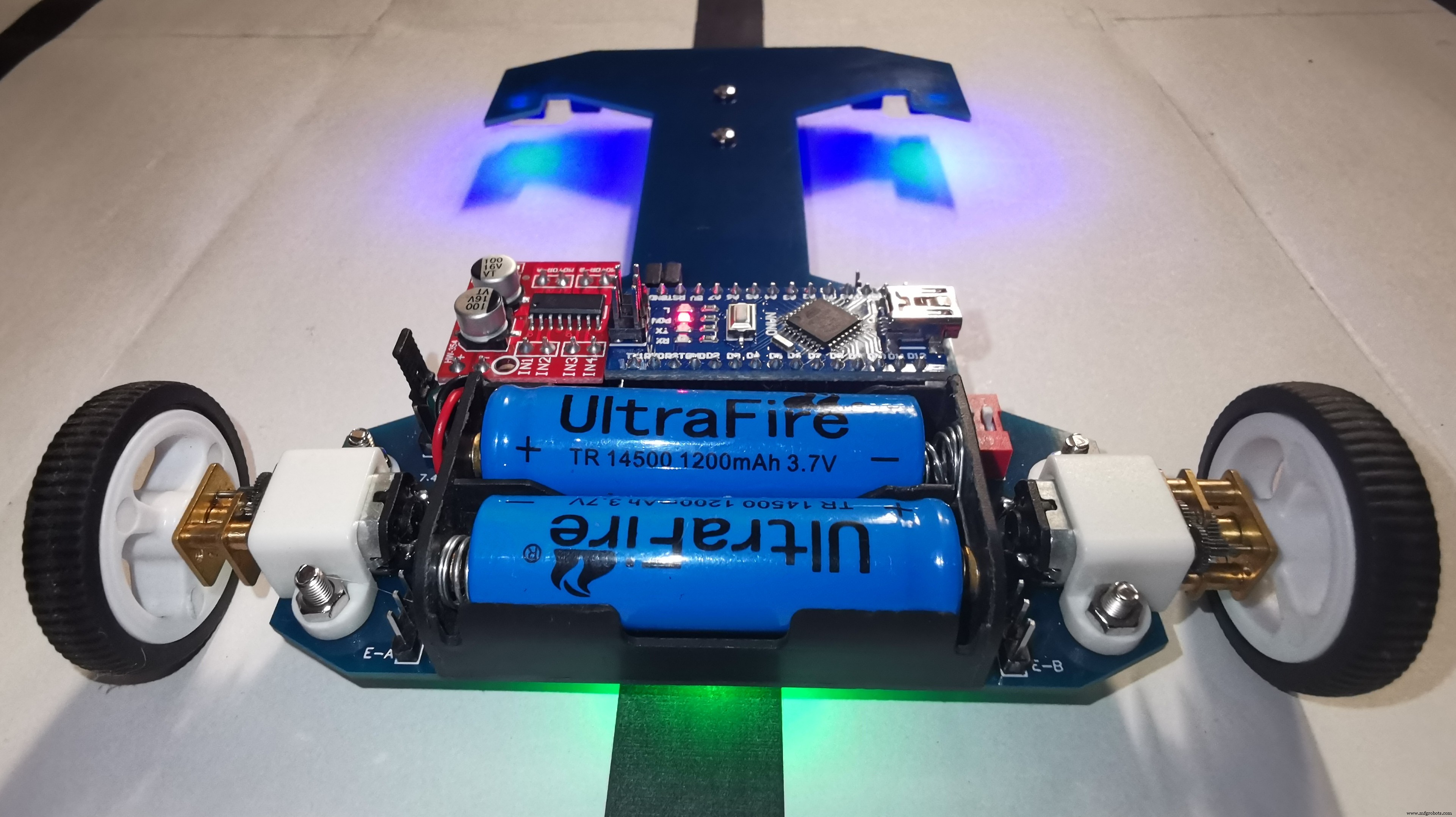
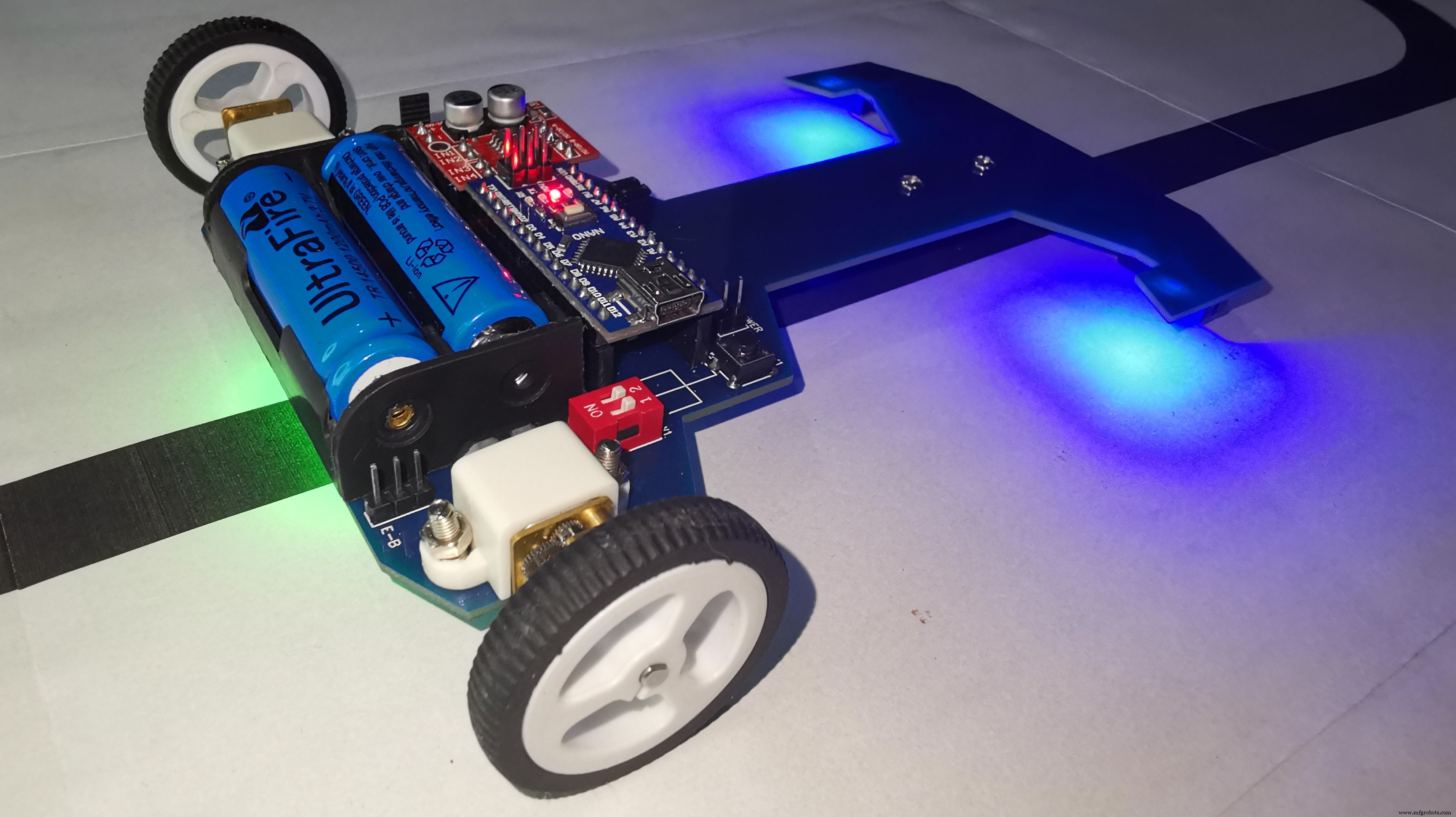
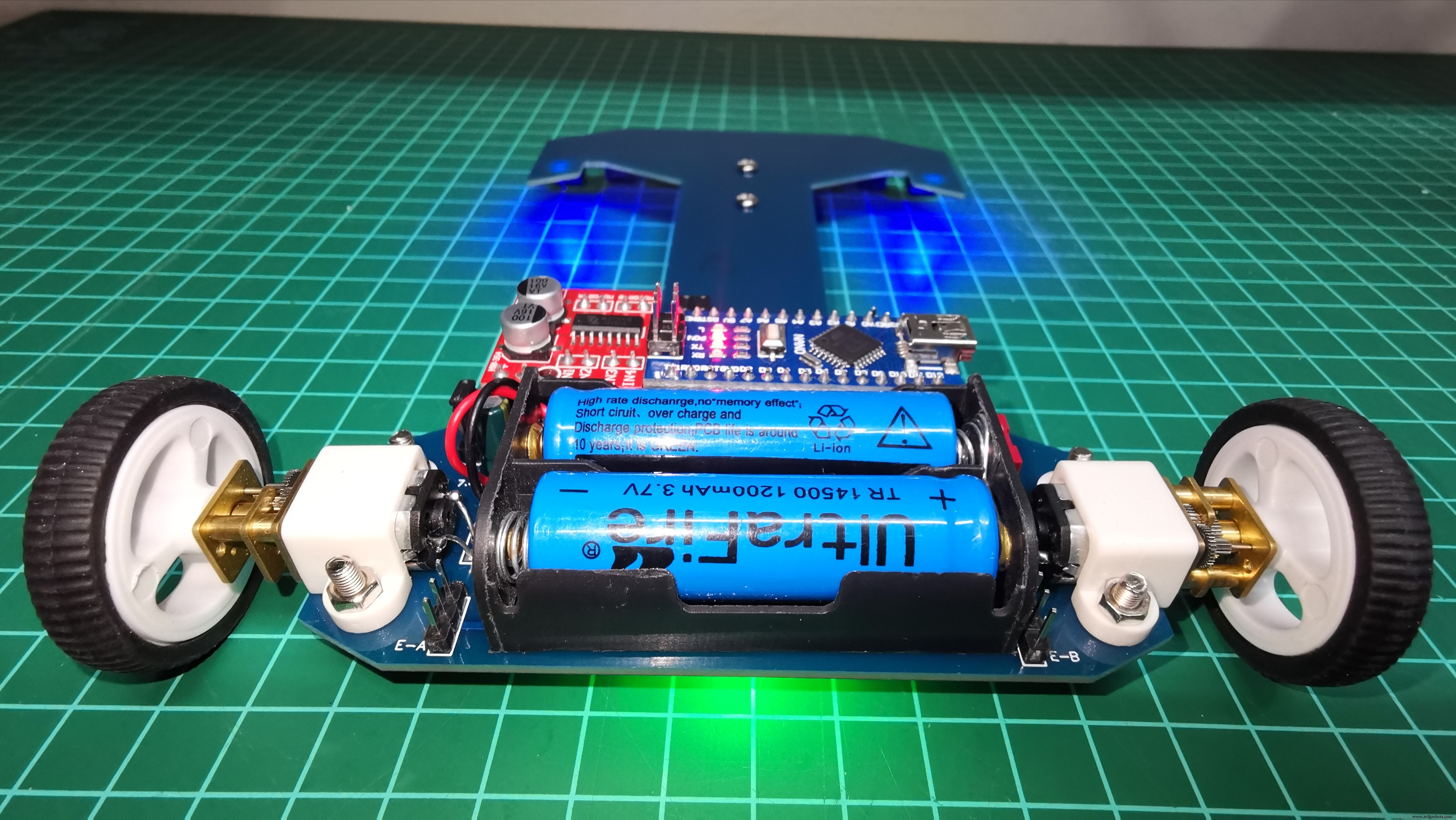
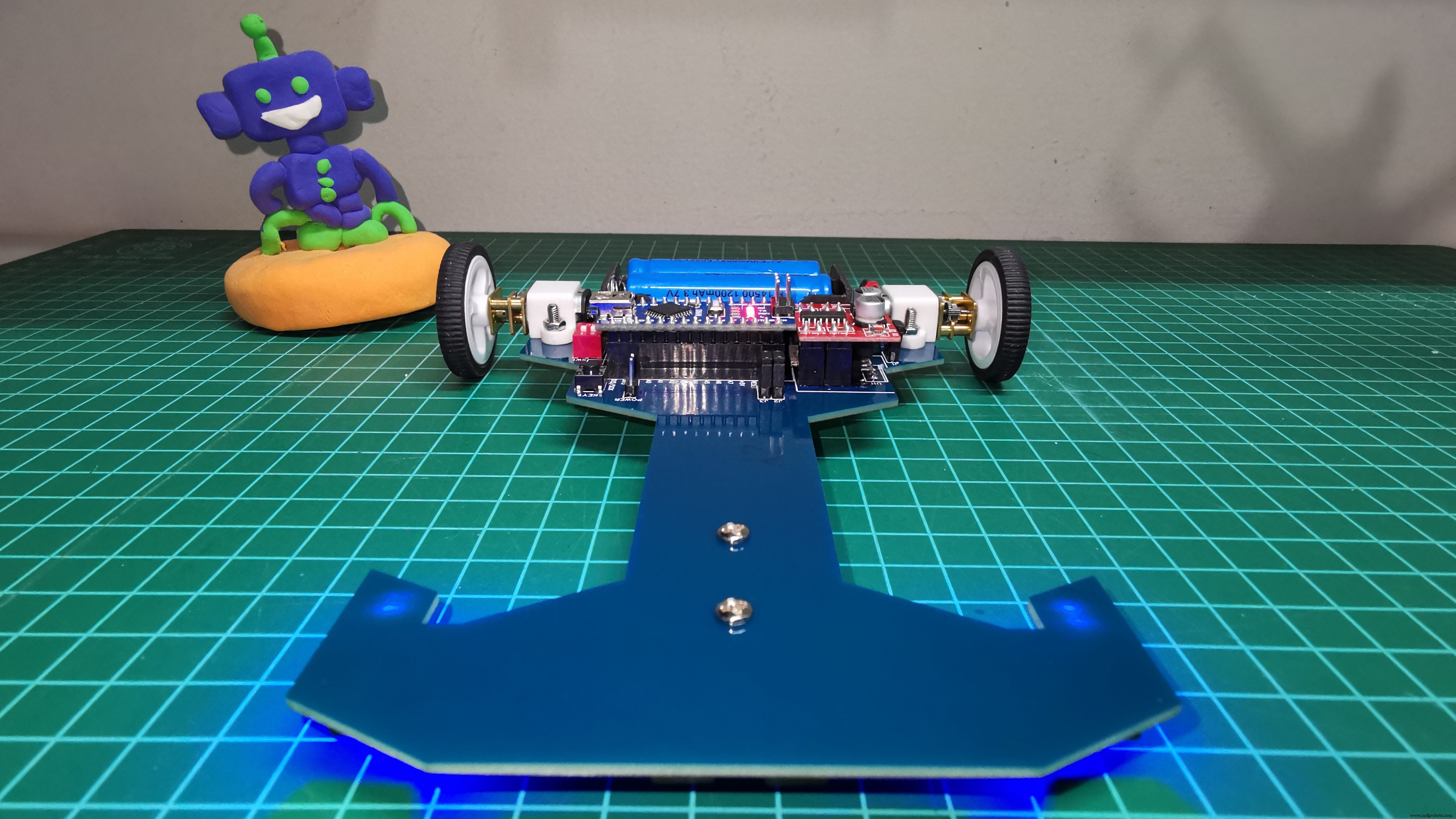
Dies ist mein zweiter Line Follower Robot (Version 4). Im Gegensatz zum vorherigen habe ich das Design der gedruckten Schaltung mit EasyEDA erstellt. Diese gedruckte Schaltung dient als Chassis des Roboters. Die PCB-Herstellung wurde von JLCPCB durchgeführt und ich muss sagen, dass sie meine Erwartungen mit beeindruckender Qualität und Lieferung in Rekordzeit übertroffen haben.
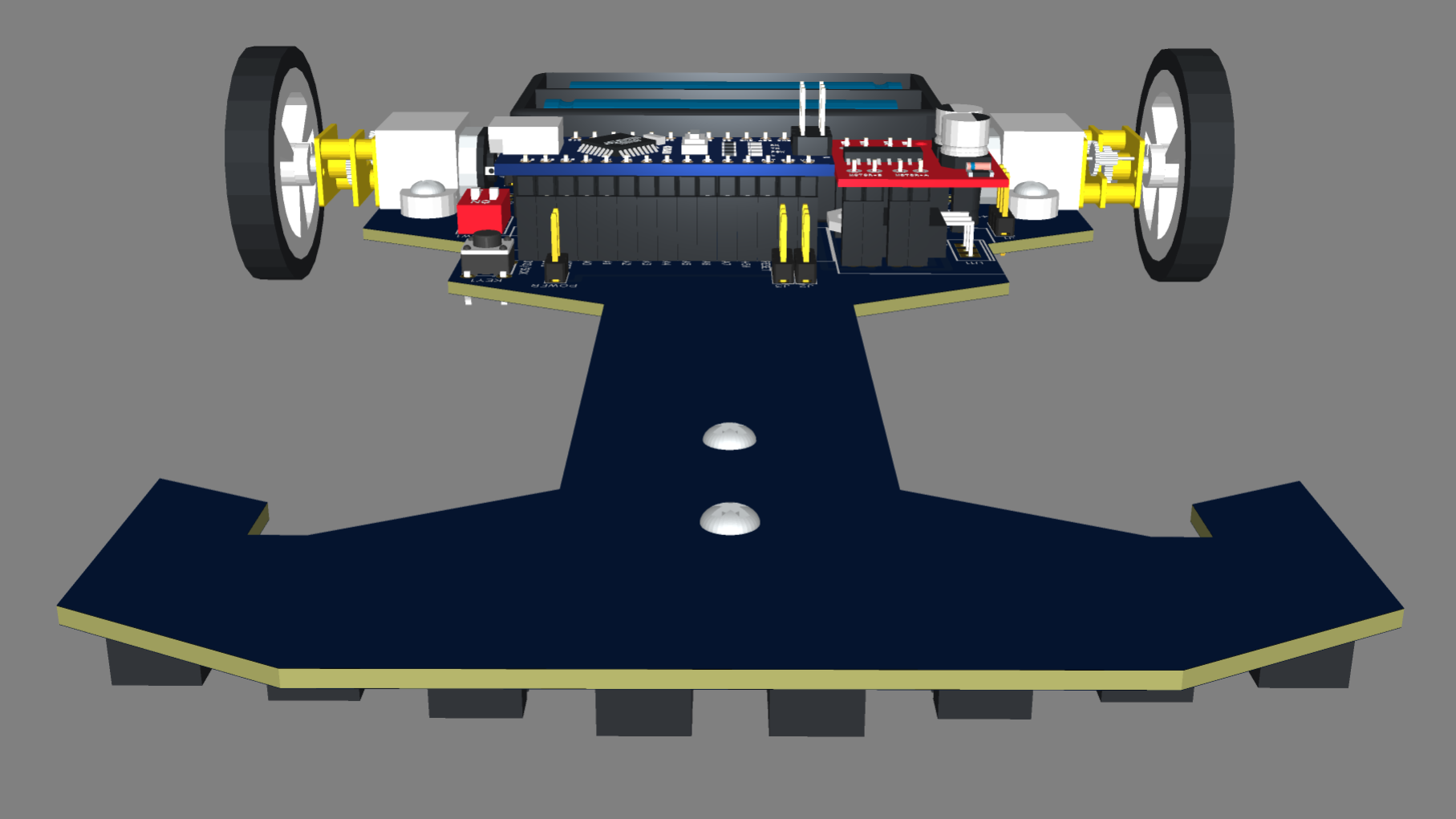
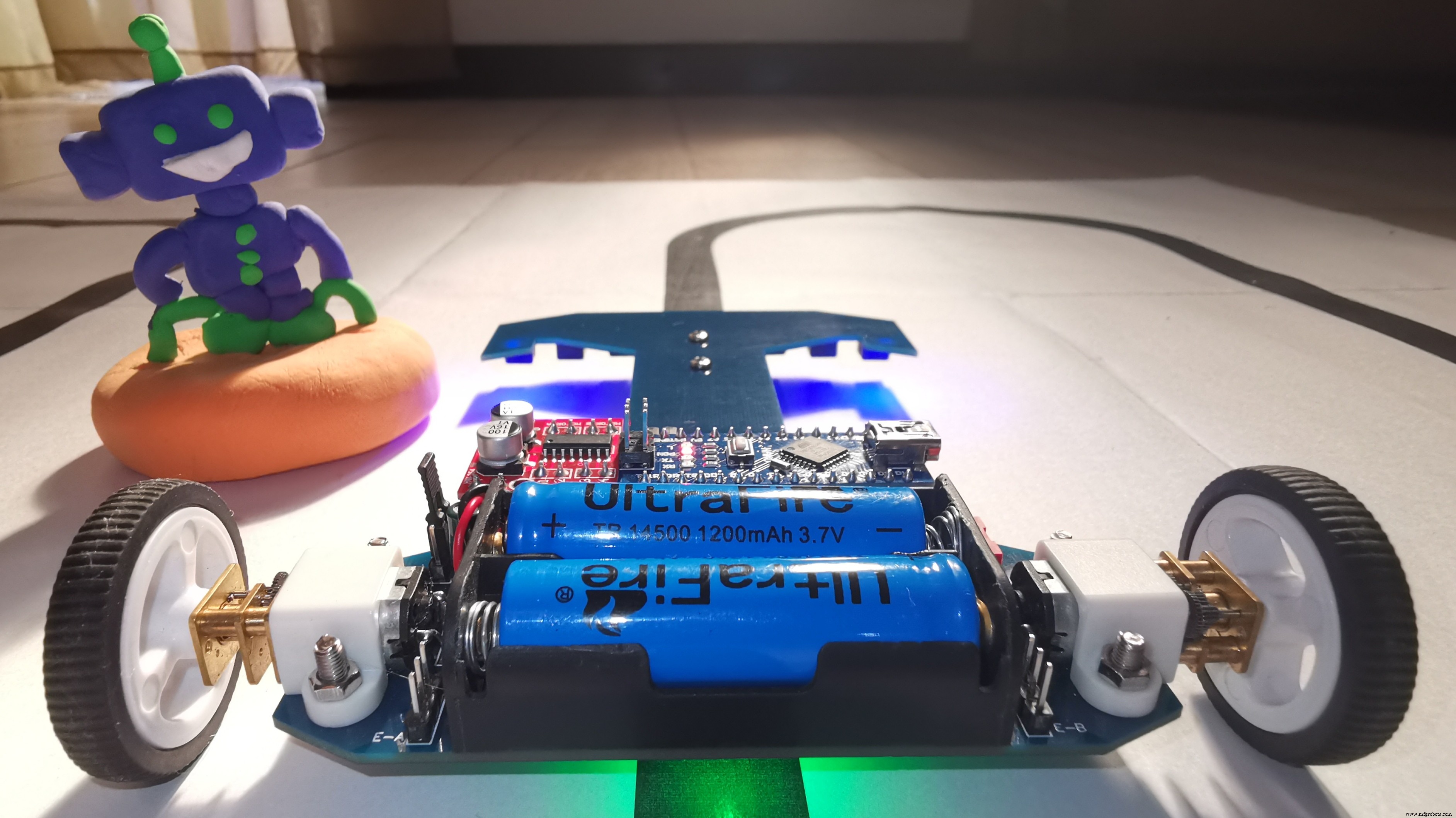
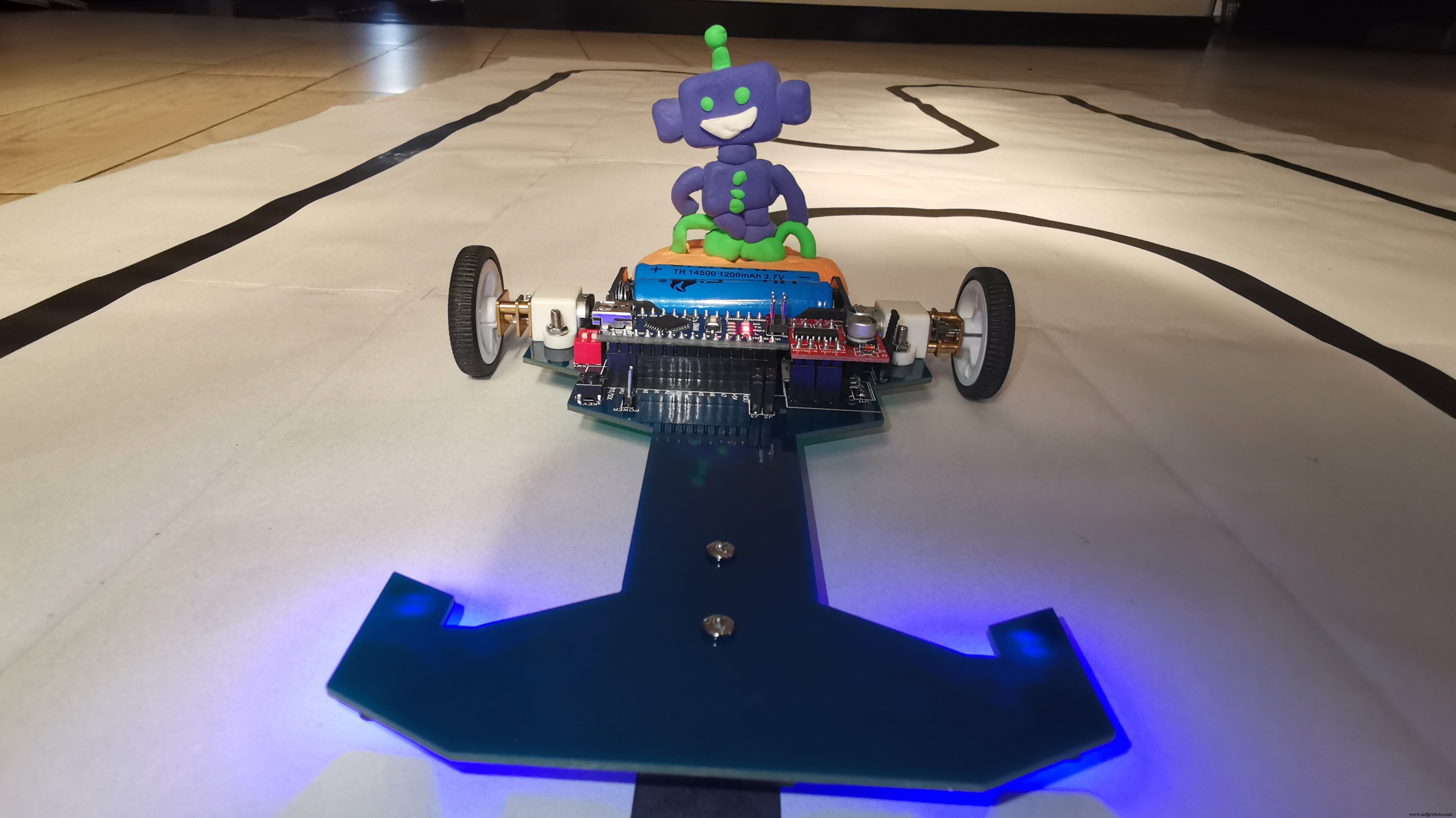
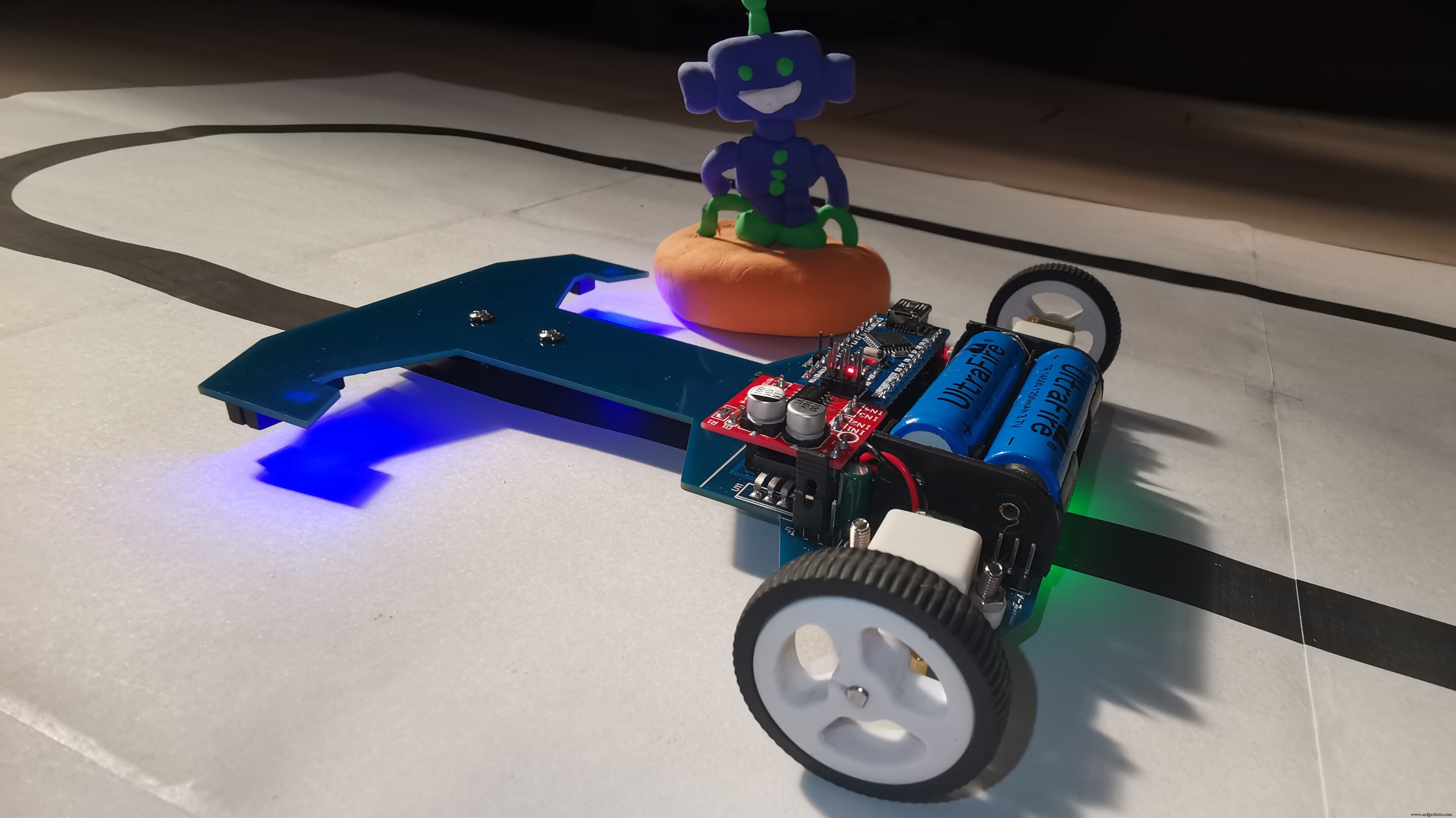
Das folgende Video zeigt das Endergebnis des Prototyps, in den ich die in TinkerCAD entworfenen 3D-Modelle eingebunden habe.
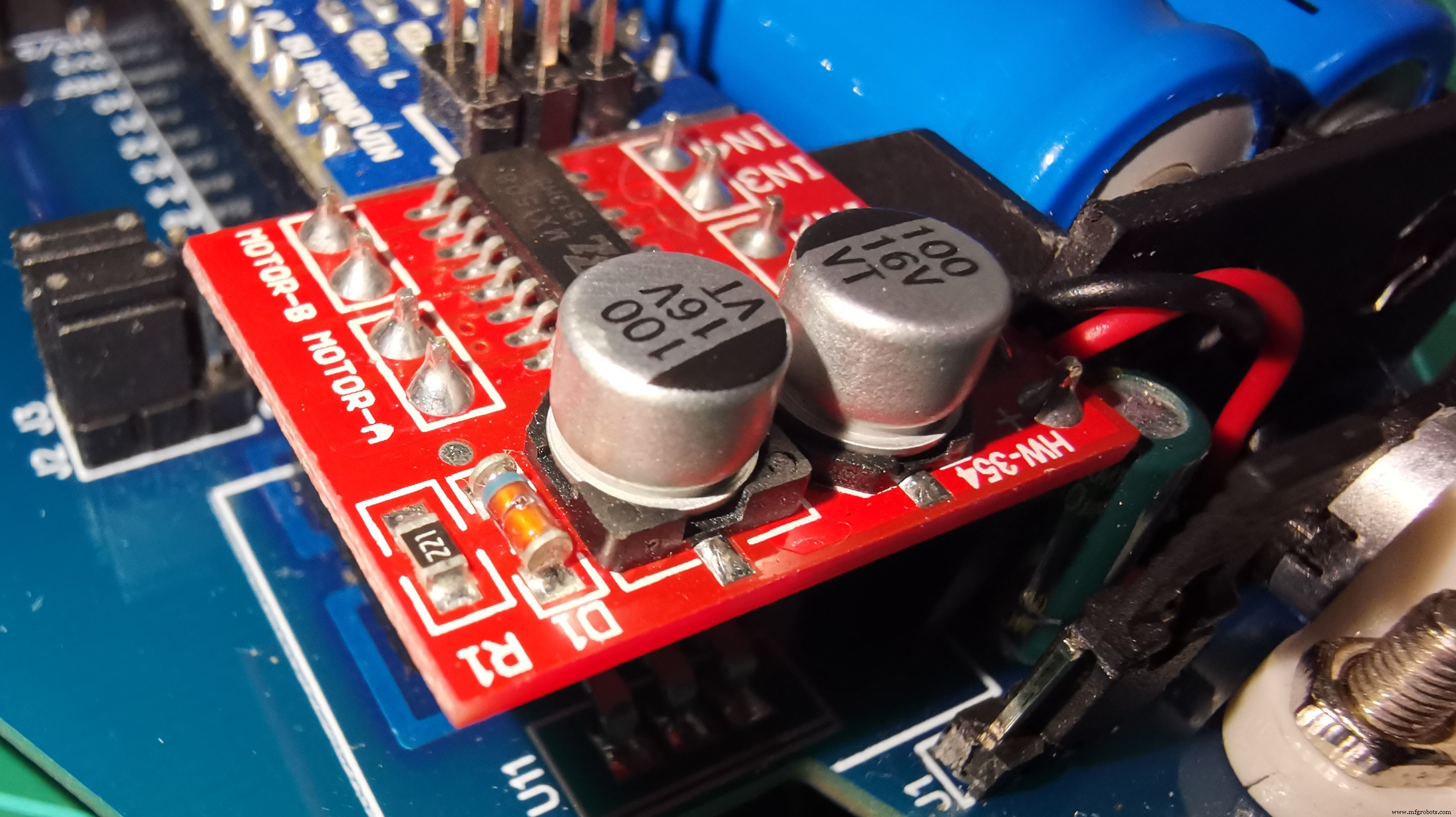
Im folgenden Video zeige ich die durchgeführten Tests mit dem Mini Motor Driver (MX1508).
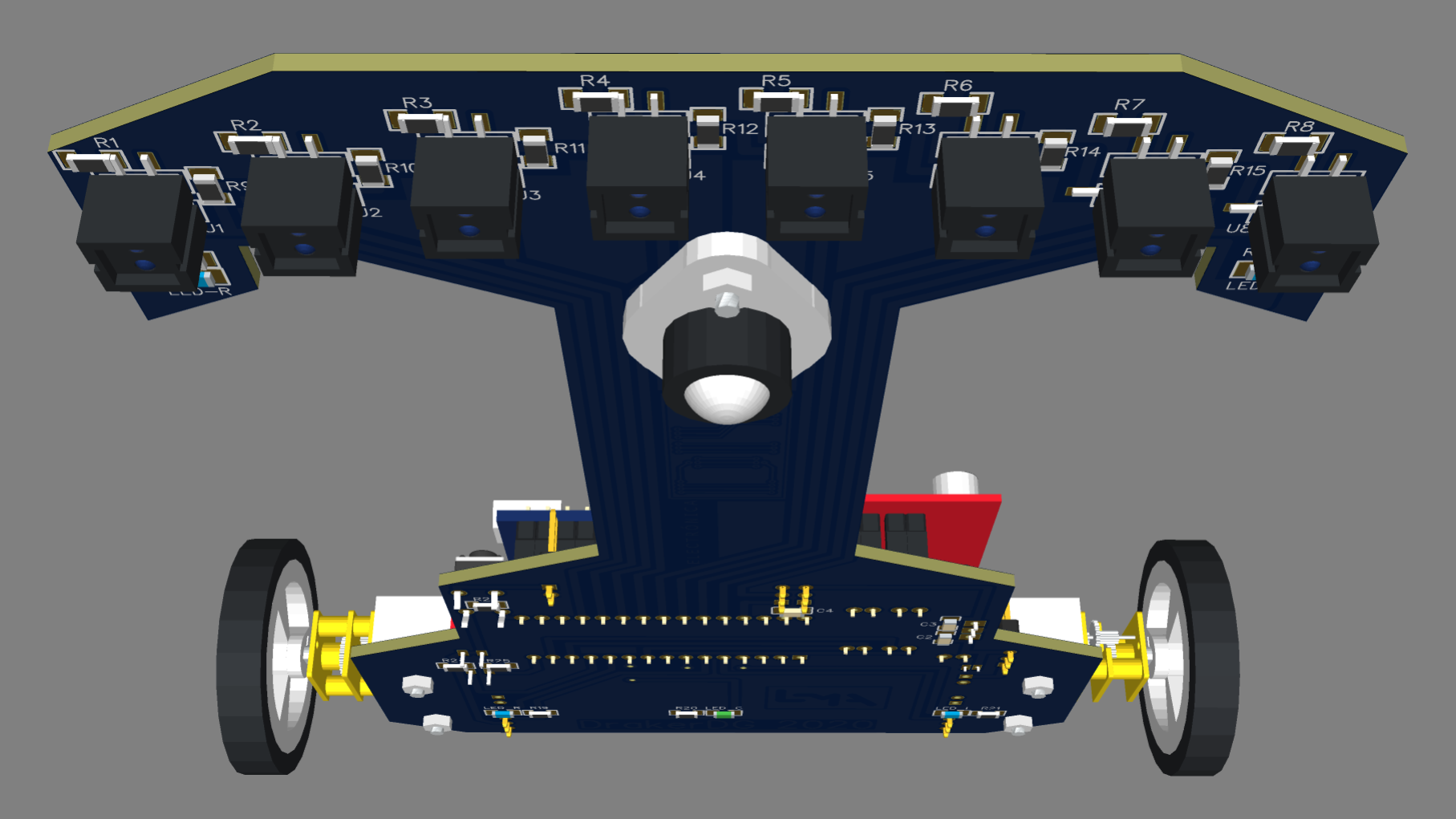
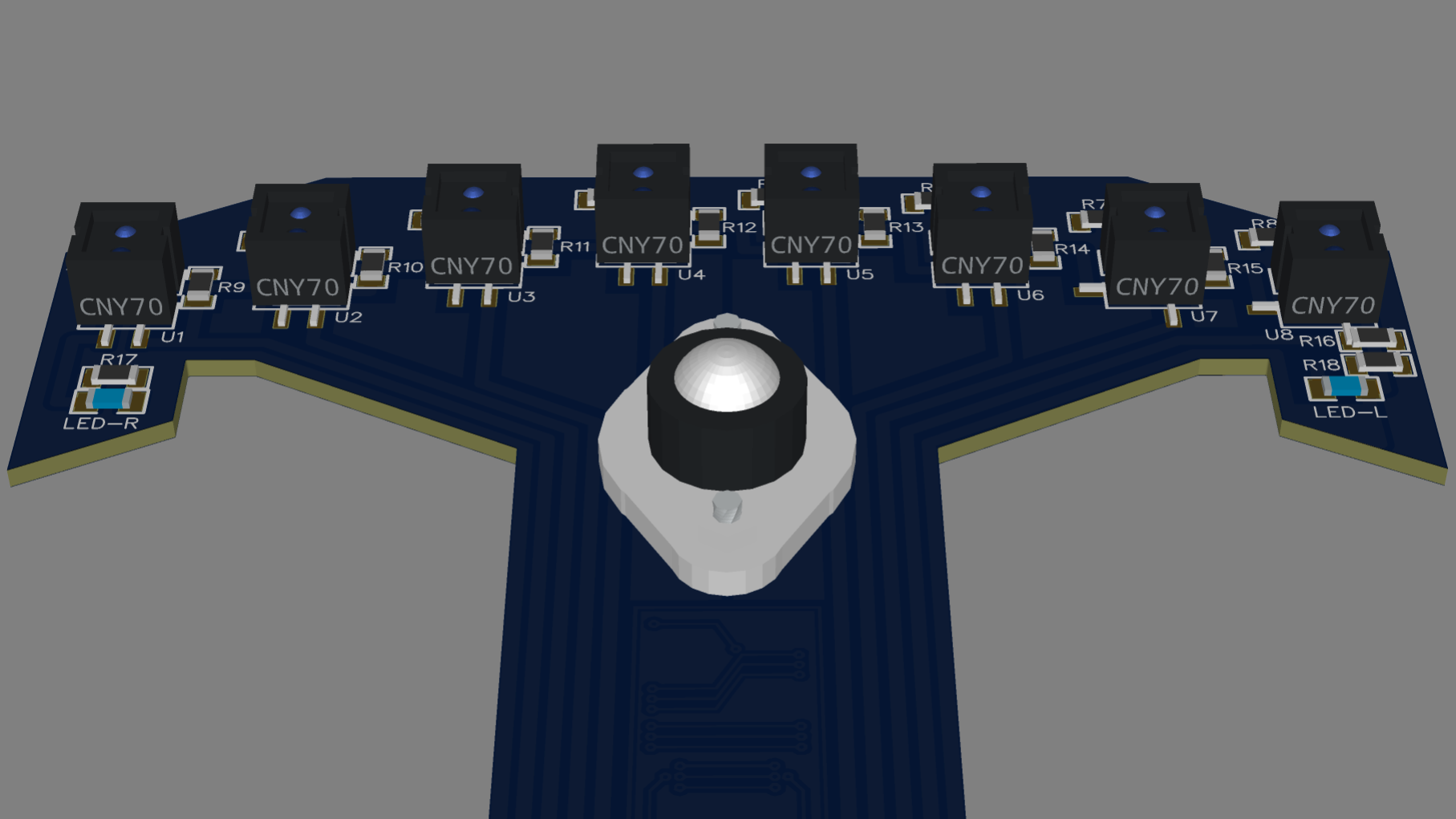
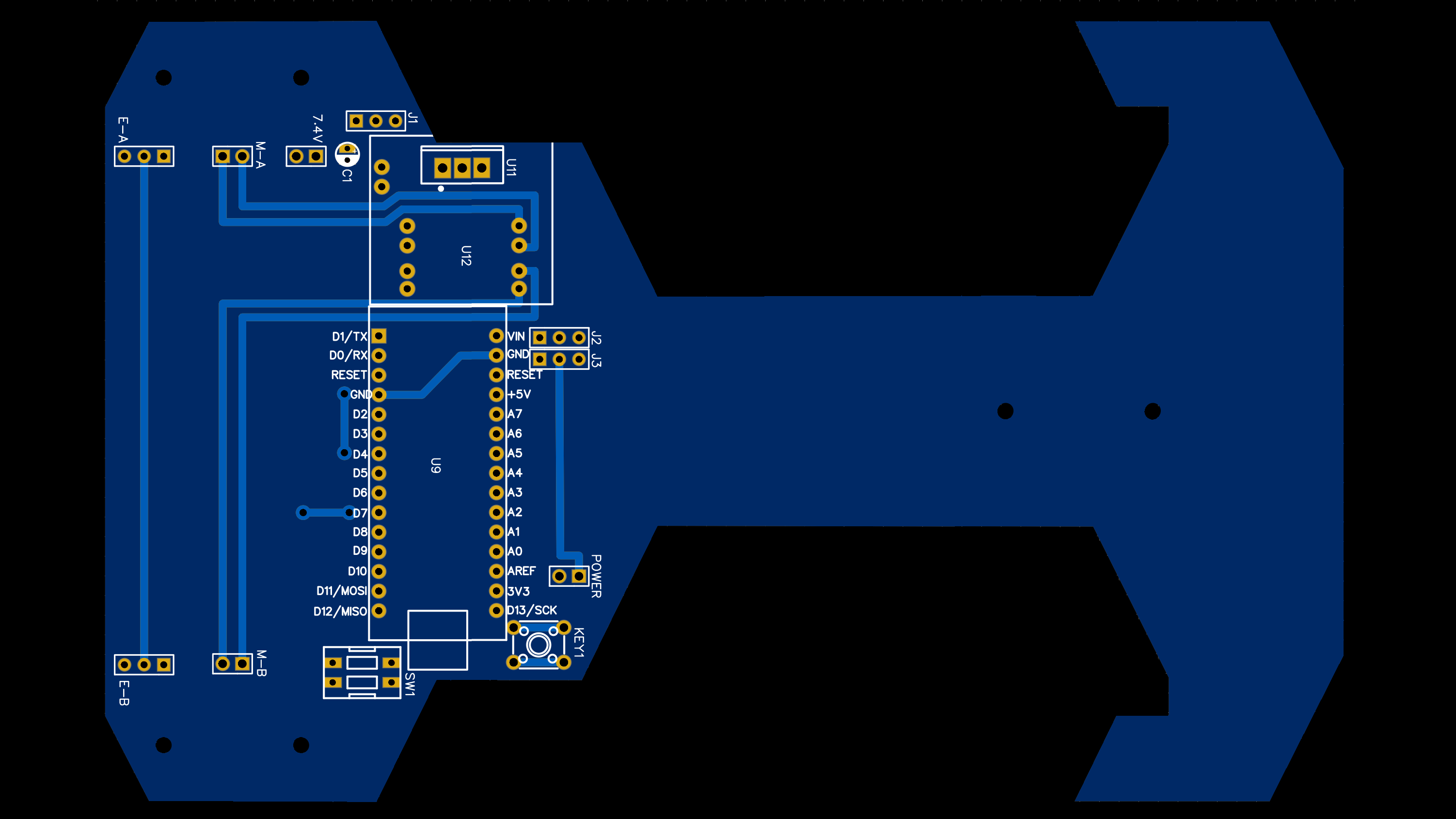
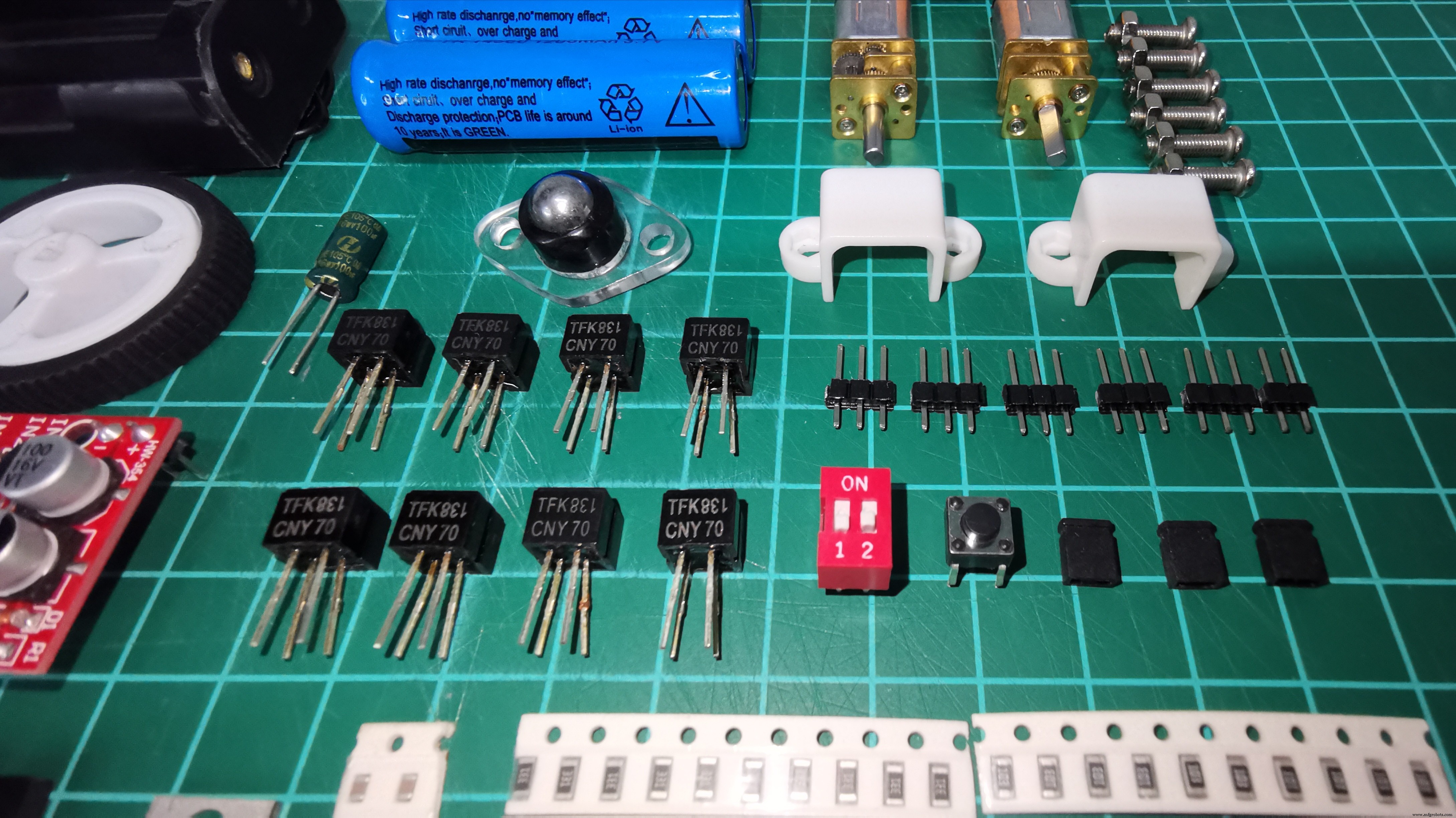
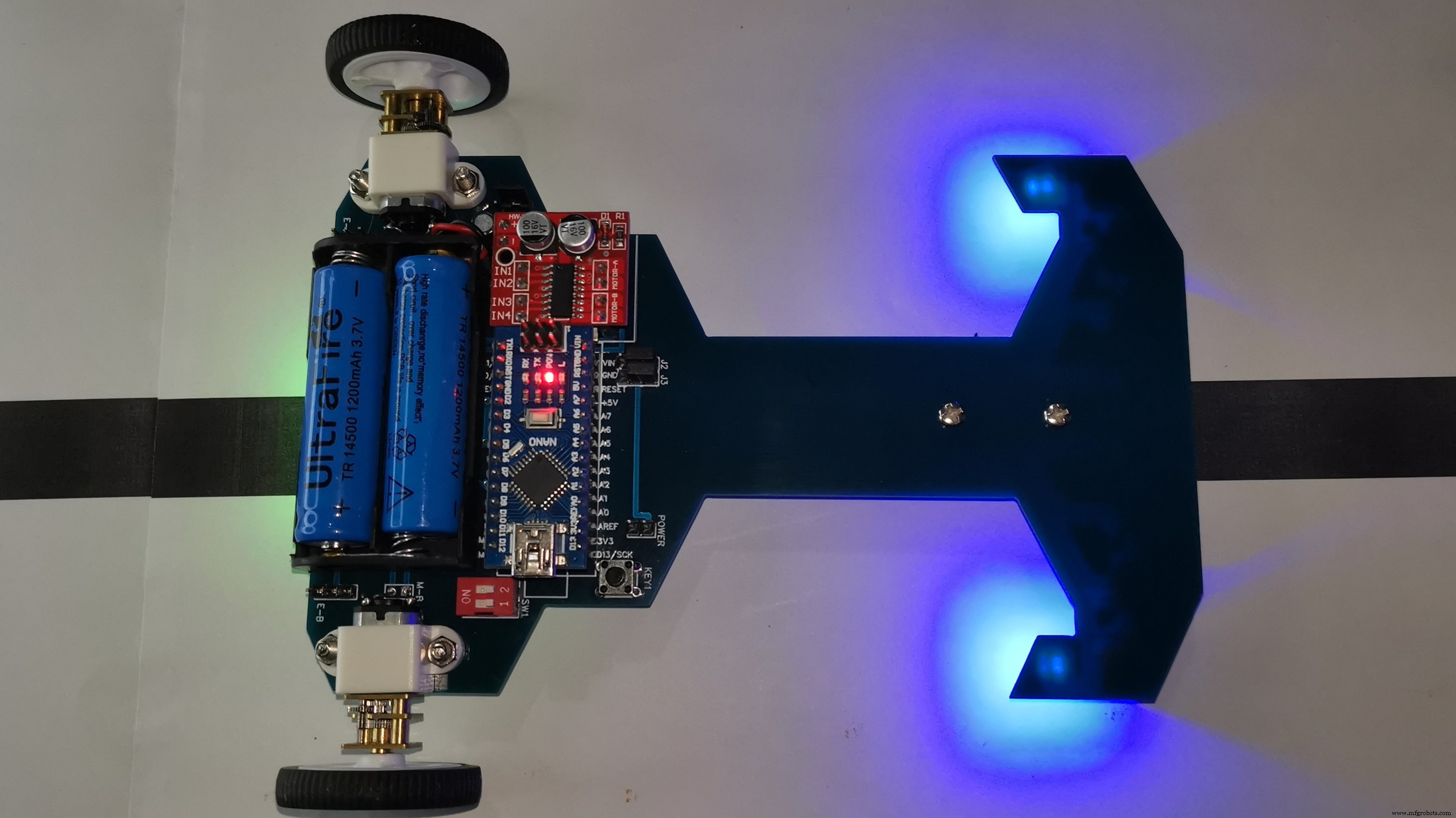
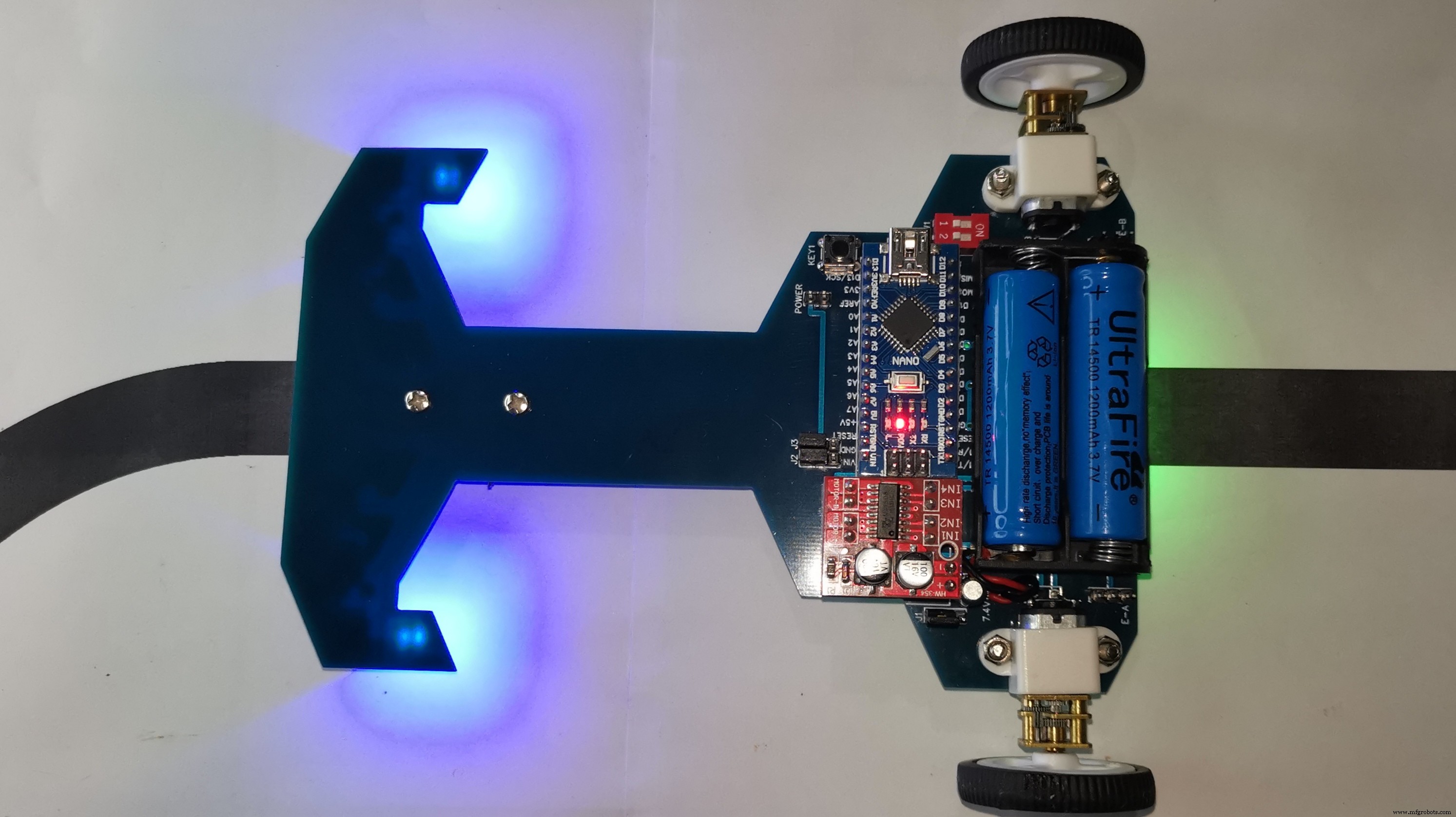
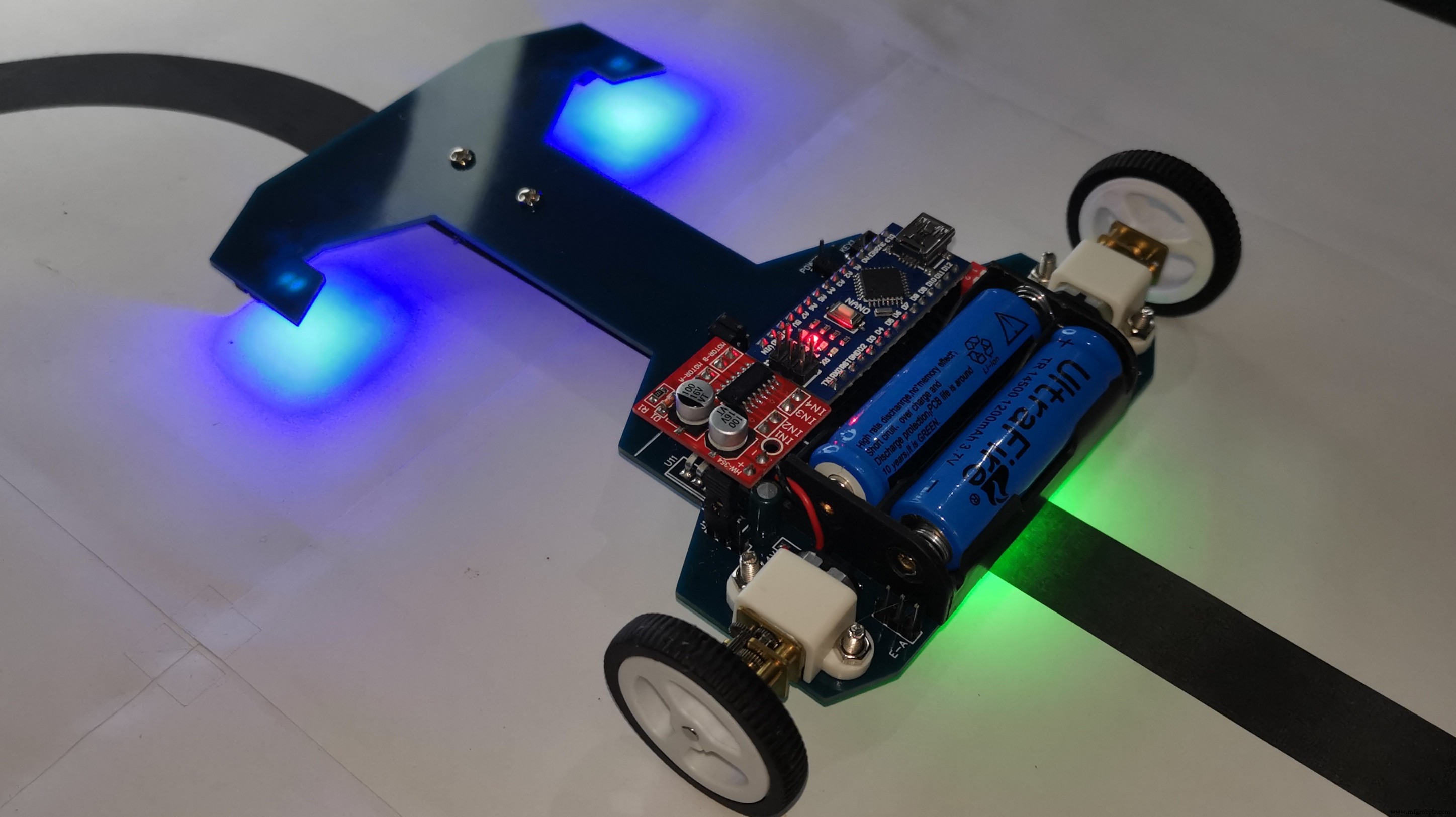
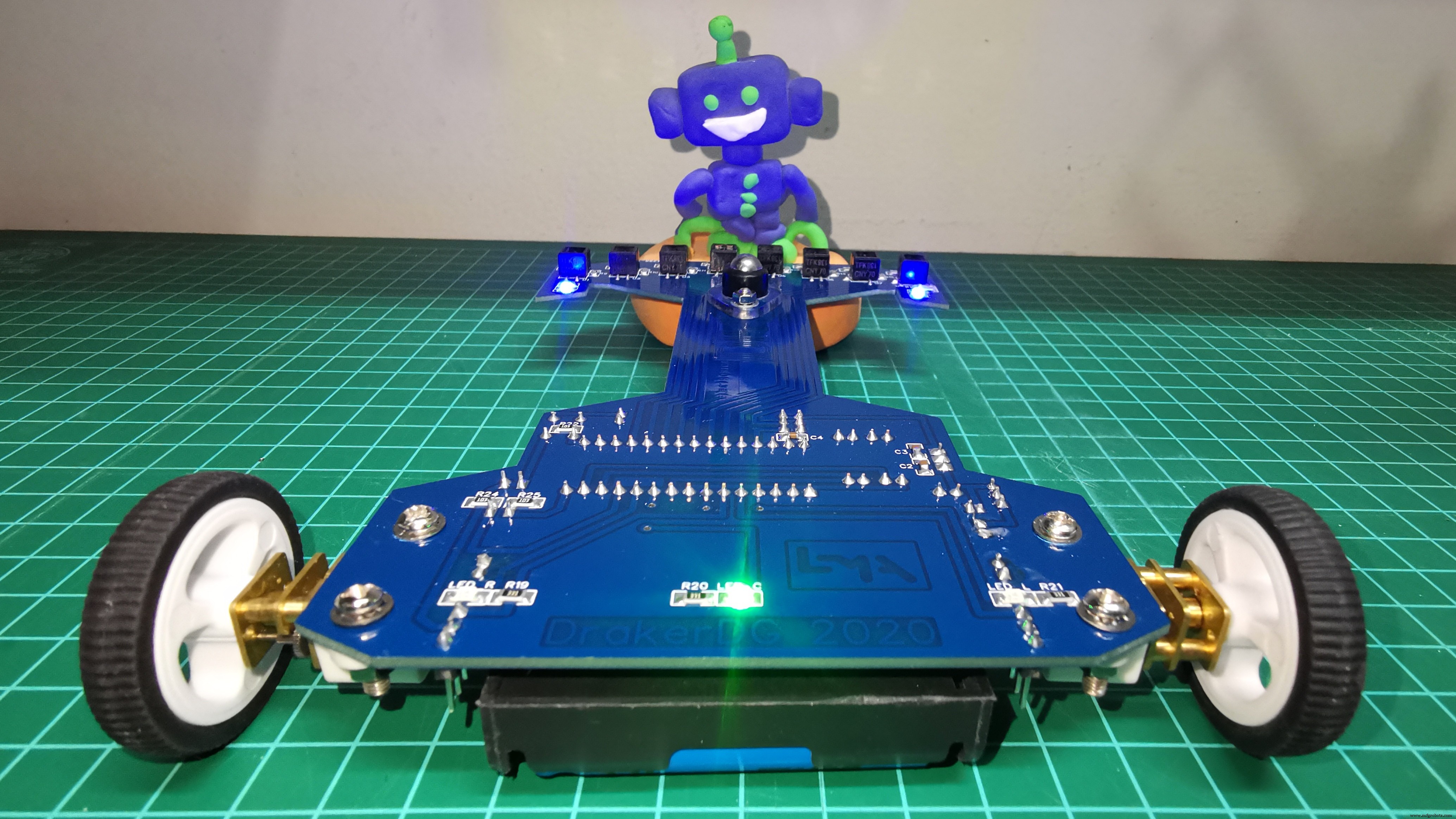
Im nächsten Video zeige ich die Tests mit den 8 CNY70 Sensoren. Diese Sensoren werden analog über die Ports A0 bis A7 des Arduino Nano gemessen. Ich verwende einen anfänglichen Algorithmus, um die Sensoren zu kalibrieren, indem ich den Bereich von 0 bis 1000 normalisiere, wobei 0 den weißen Hintergrund und 1000 die schwarze Linie darstellt. Nach Abschluss der Kalibrierung tritt es in die Schleife ein und startet den Lesezyklus, wobei die Position von 0 bis 7000 berechnet wird, die jeweils dem linken Sensor gegenüber dem rechten Sensor entspricht. Dieser Positionswert wird verwendet, um den proportionalen Fehler P zu berechnen. Der Bereich von P reicht von -3500 (links) bis 3500 (rechts), wobei 0 der Mittelwert ist. Der Algorithmus speichert den Positionswert des letzten Sensors (links oder rechts), der die schwarze Linie erkannt hat, um diese Daten für Bremsaktionen und Linienwiederherstellung zu verwenden.
Der abschließende Test mit der zu 95% montierten Schaltung wird im folgenden Video gezeigt. Ein letzter Stromtest mit einem maximalen Verbrauch von 200 mA.
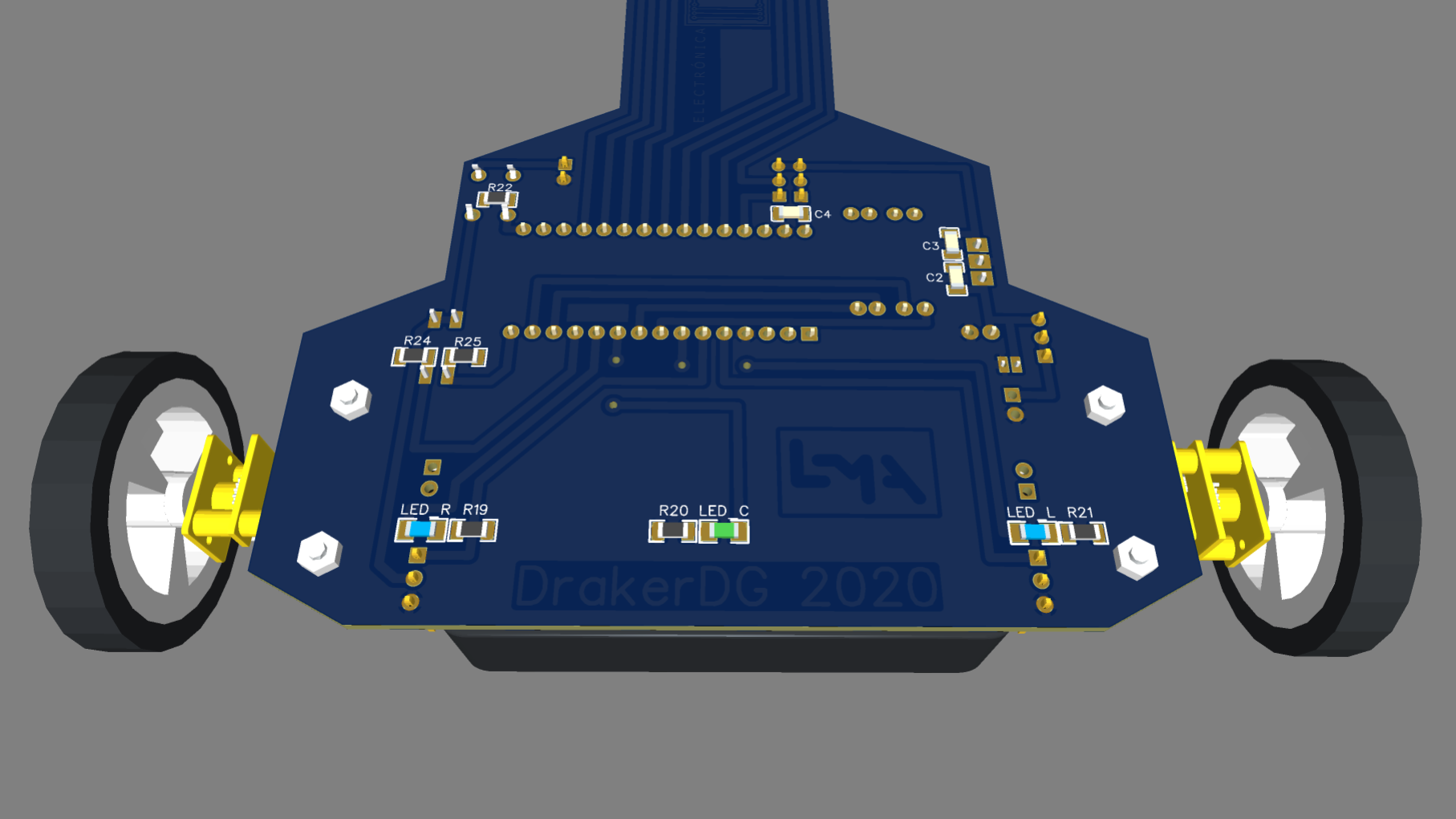
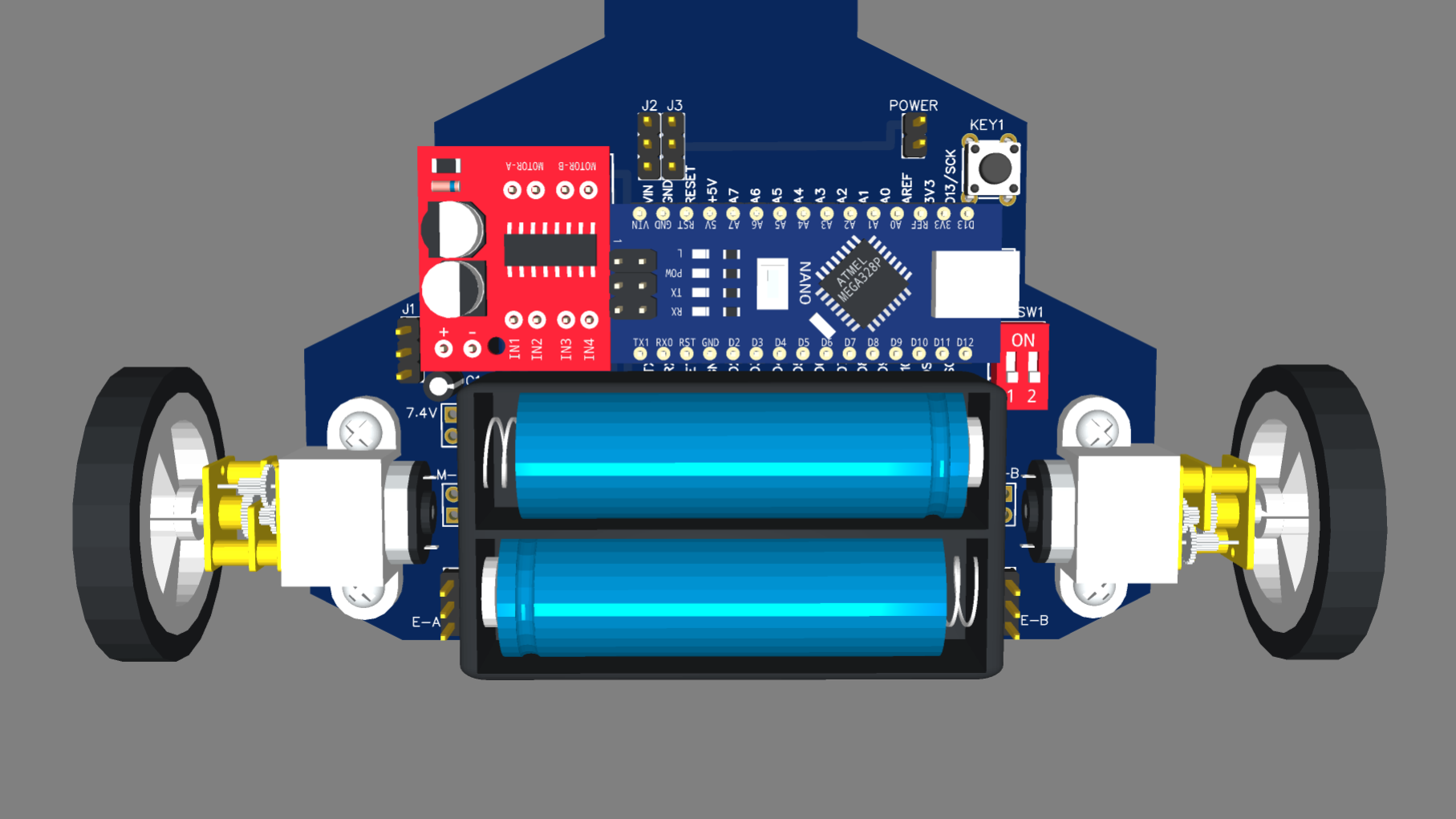
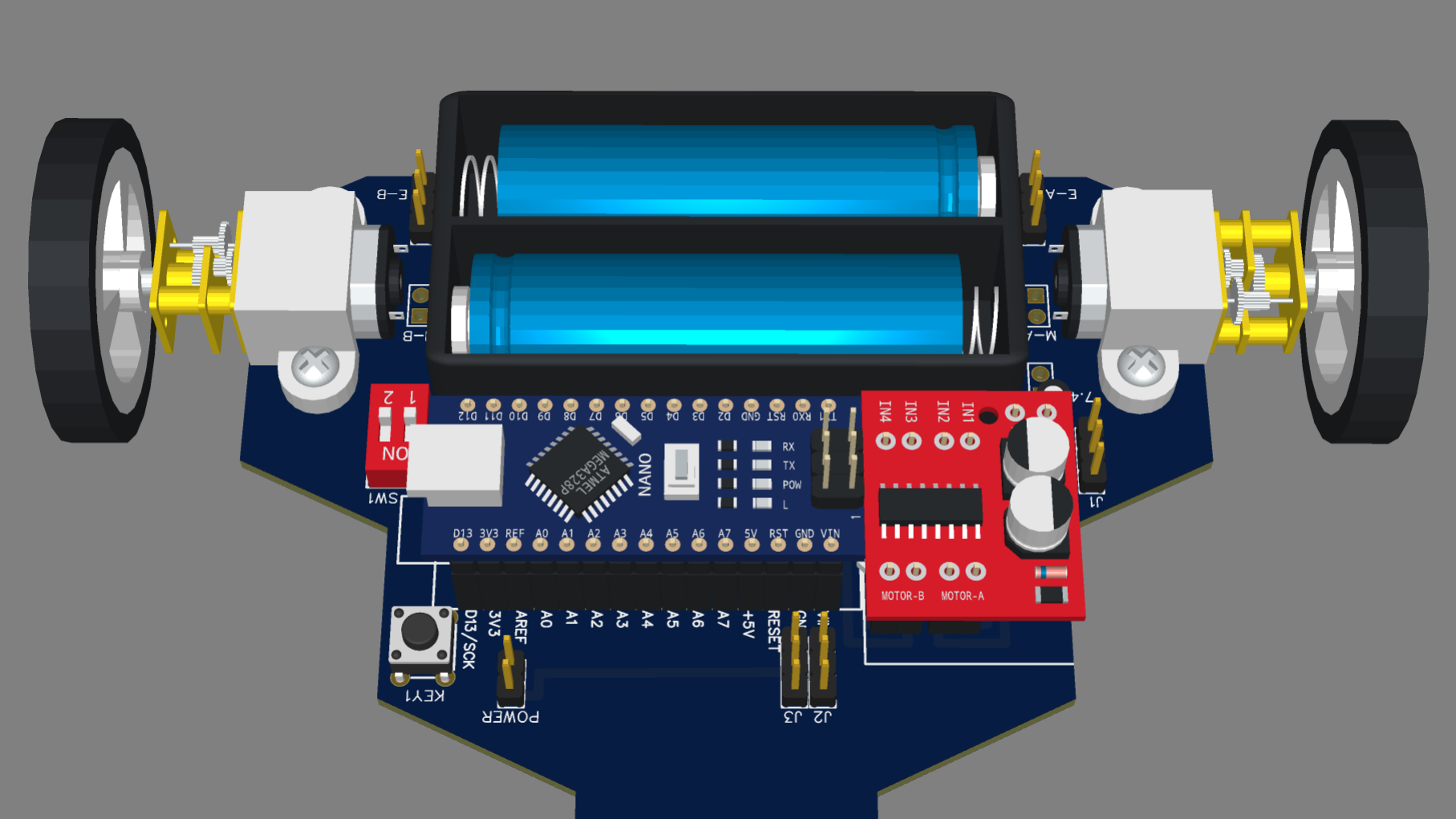
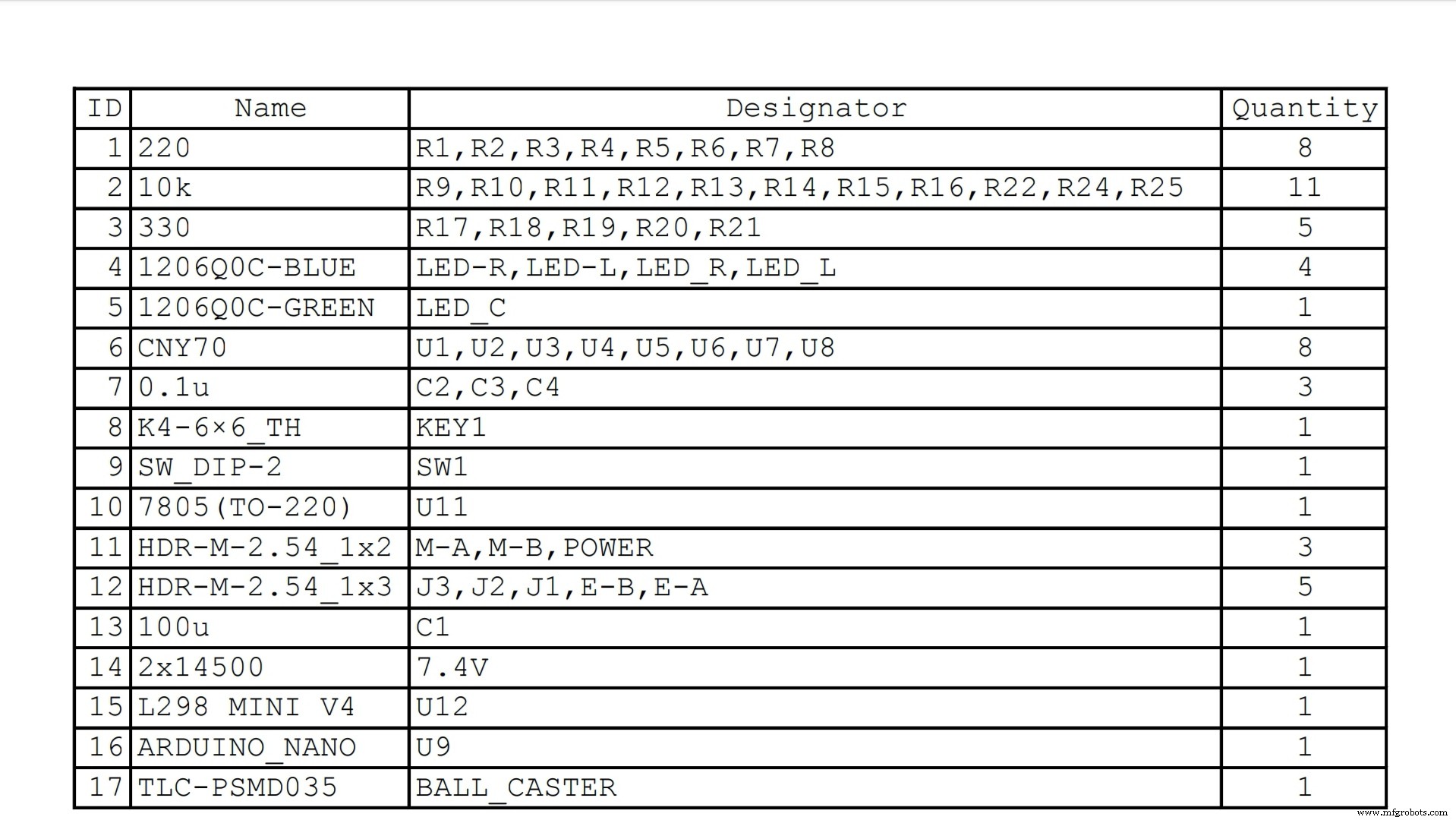
Dies ist die neueste Version der gedruckten Schaltung des Roboters, die auf JLCPCB hergestellt werden kann.
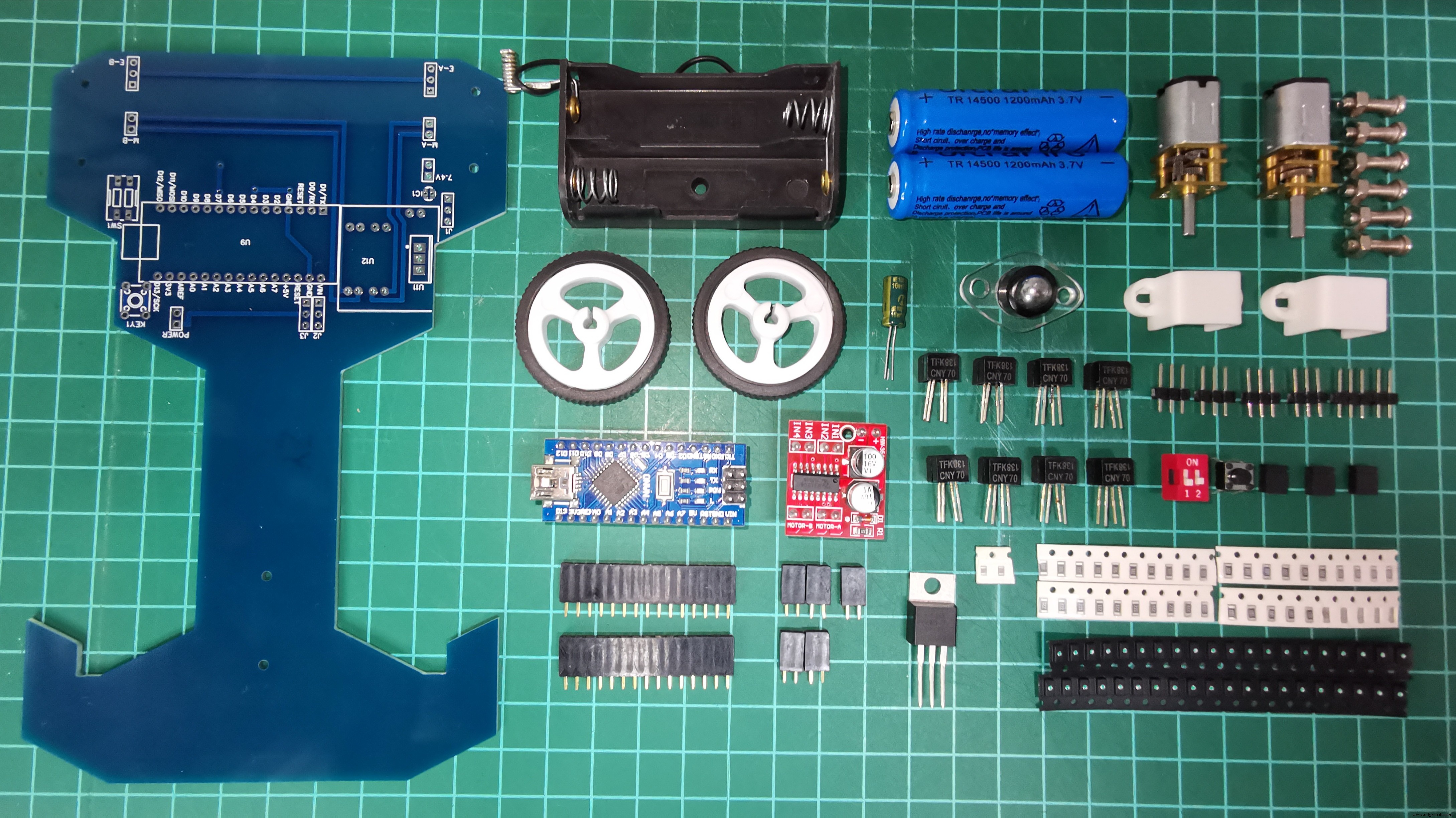
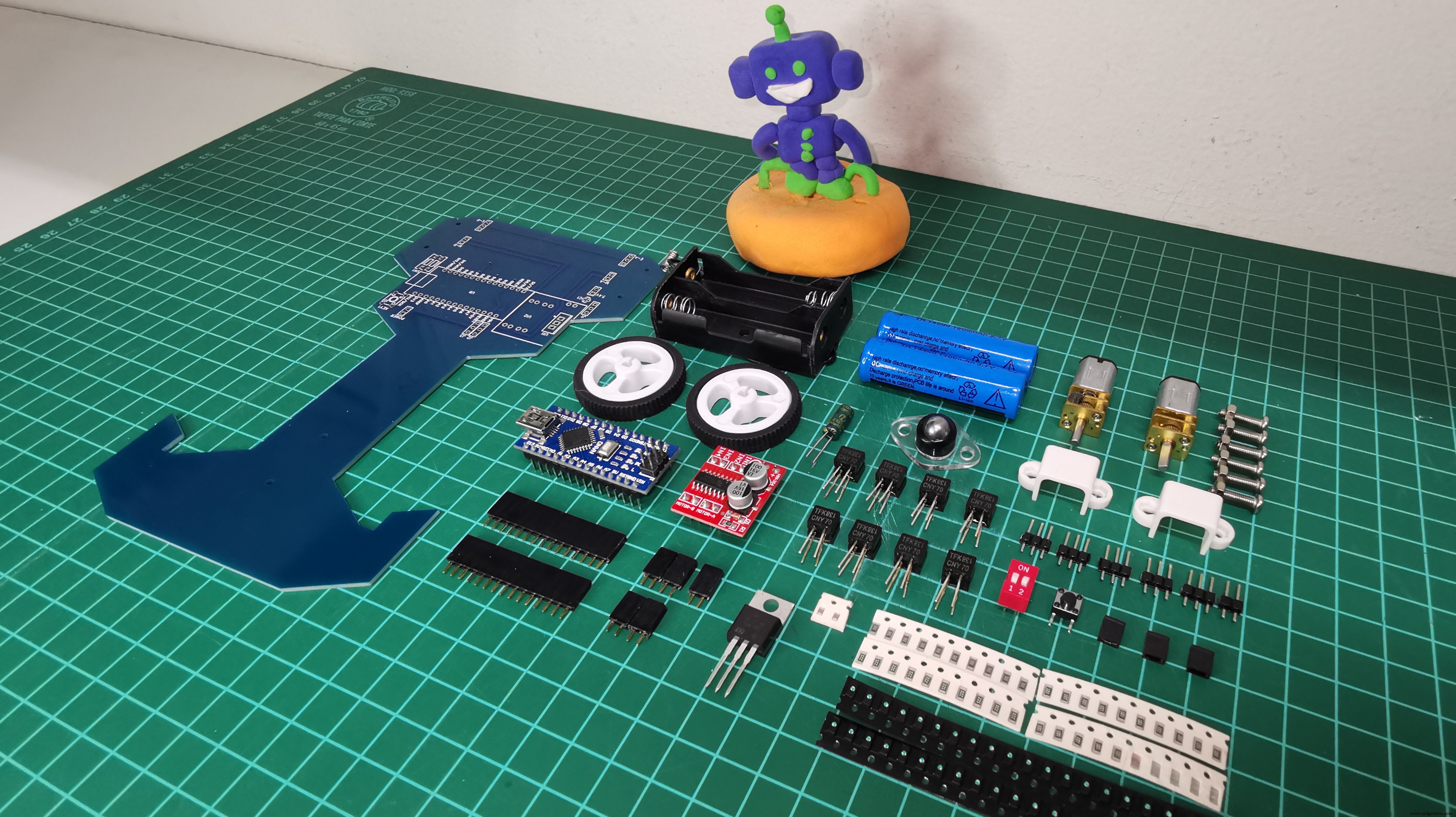
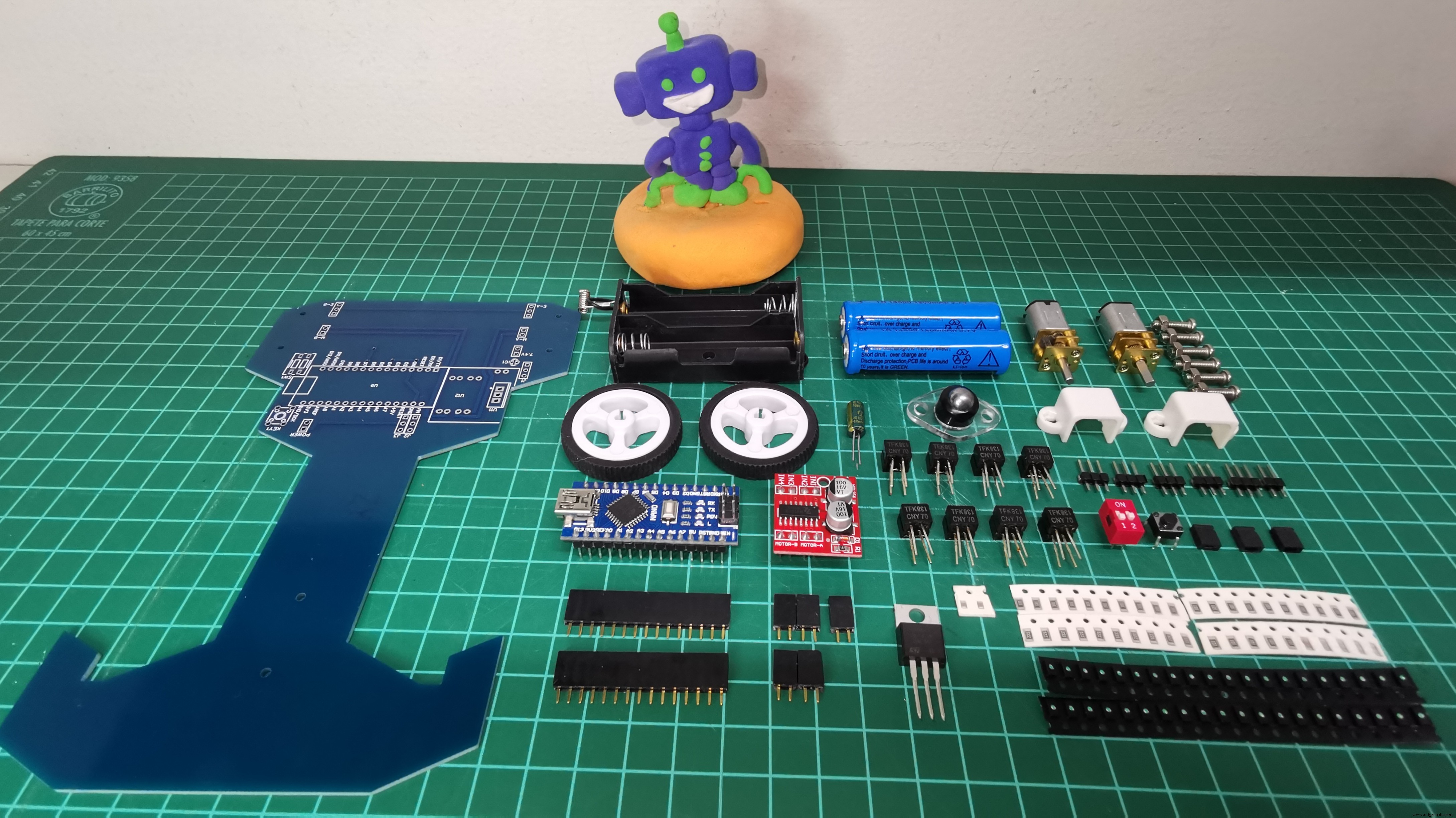
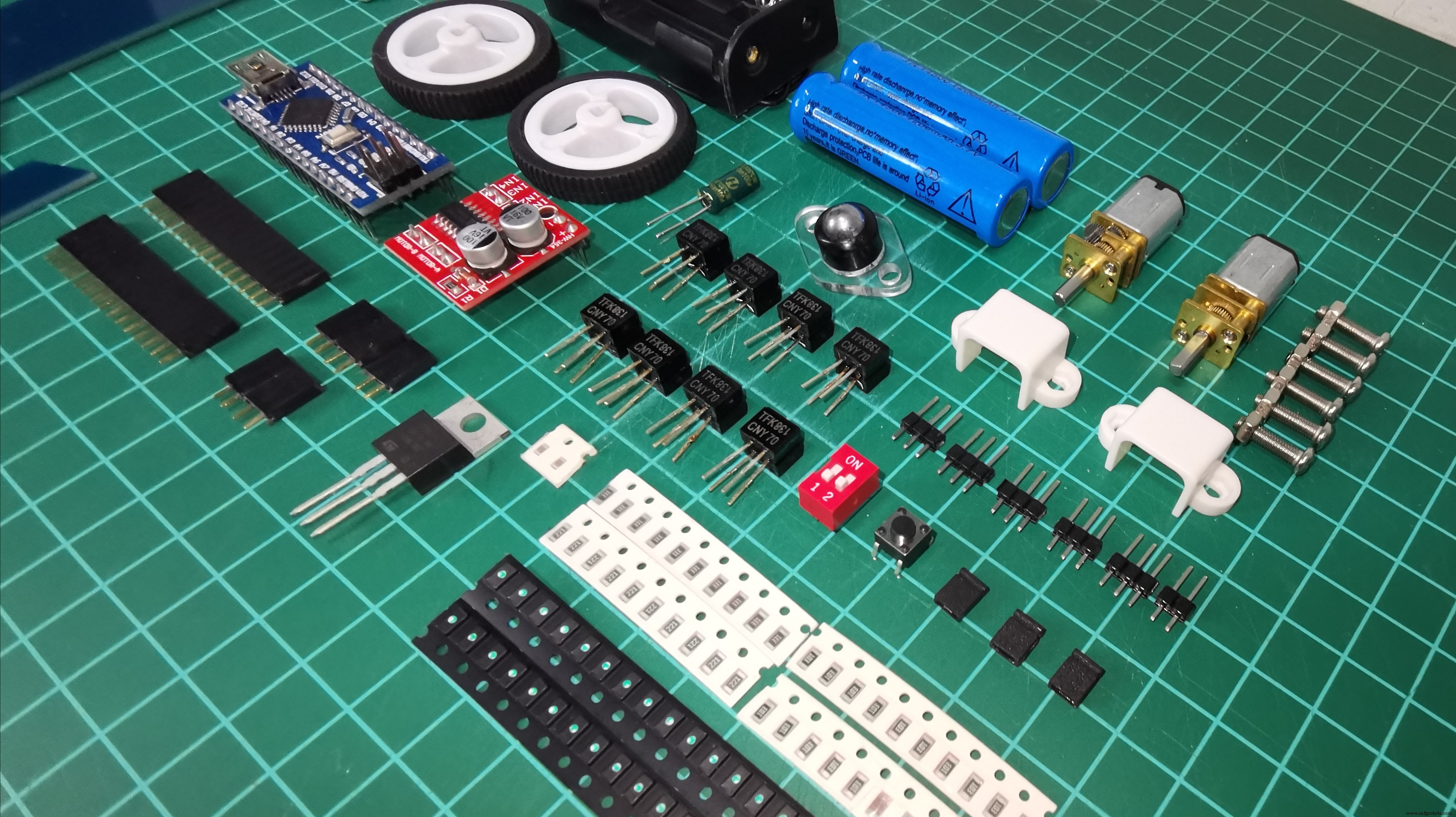
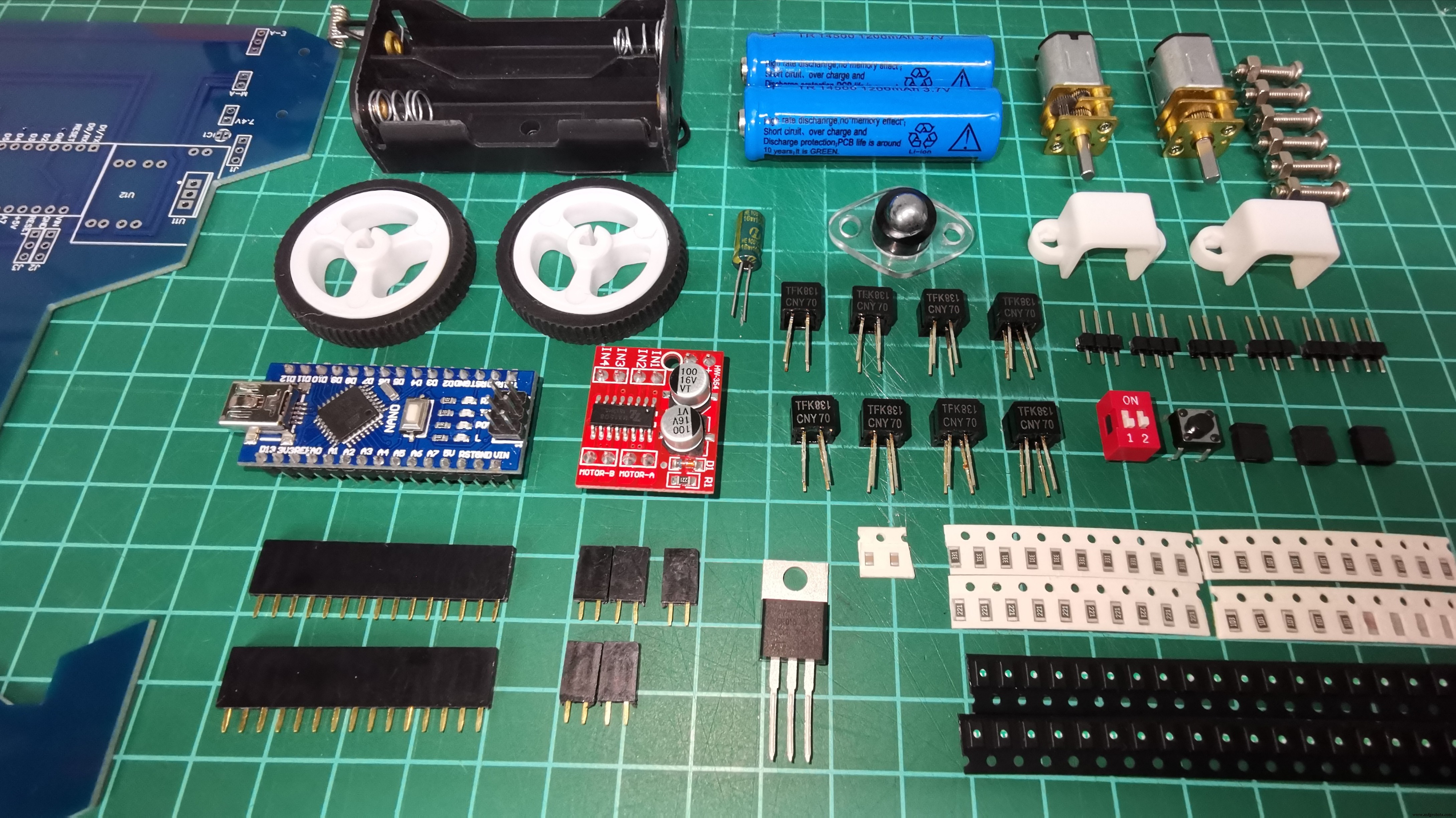
Das ist das Unboxing.




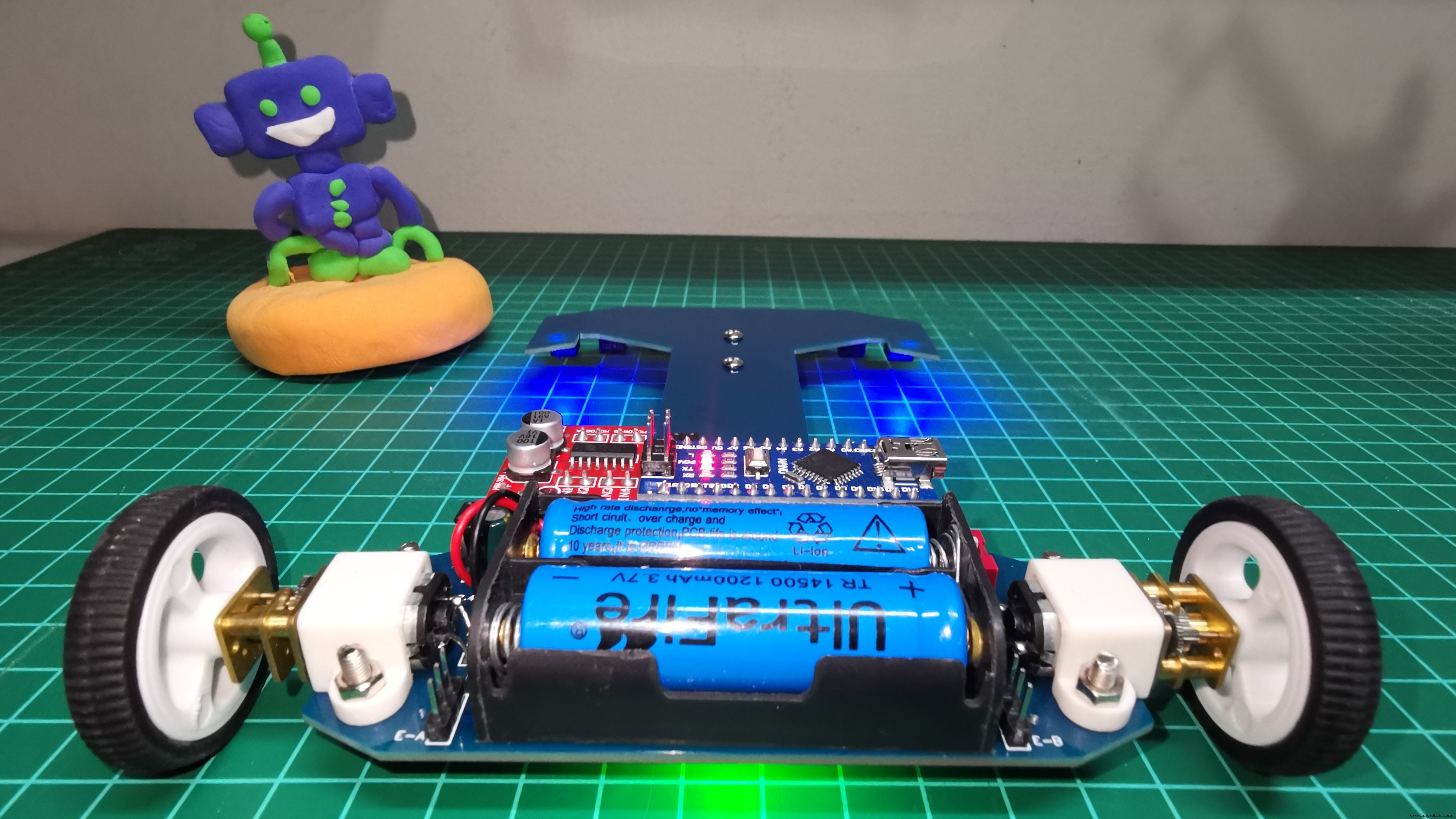
Im Endspurt und schon mit der Gesamtstückzahl zeige ich den Zusammenbau meines ersten Speed Follower Roboters.
Endlich und mit viel Mühe habe ich schon den fertig gebauten Prototypen, ich zeige weiter unten wie man den Code lädt (Code Load Mode), wie man die Sensoren testen kann und natürlich die Tests auf der Strecke. Sehr zufrieden mit der Bedienung, der Testcode schafft es, den Code sehr gut zu kontrollieren. Ich habe einen PID-Algorithmus (Full) verwendet, um die Korrekturen zu glätten und den Verlauf der Linie wiederzuerlangen. Da alles verbessert werden kann, werde ich weiter mit dem Code spielen, um eine effizientere Version zu erreichen.


Als Ergänzung habe ich die Simulation dieses Roboters in der Webots-Anwendung durchgeführt. Es befindet sich noch im Verbesserungsprozess, aber ich teile dieses Video, damit Sie eine Möglichkeit kennen lernen, mechanische und logische Tests (Code) durchzuführen, um einen Roboter in einer virtuellen Umgebung zu steuern, und dies hilft, den Betrieb eines physisch gebauten Roboters zu verstehen.