


Beschleunigung in Winkel vom MPU6050 I2C-Sensor umwandeln
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
| |||
 |
|
Über dieses Projekt
Vor einiger Zeit habe ich ein Tutorial gepostet zum Anschließen von MPU9250 Beschleunigungsmesser, Gyroskop und Kompasssensor zu Arduino Nano und programmiere es mit Visuino um Paketdaten zu senden und auf einem Oszilloskop und visuellen Instrumenten anzuzeigen.
Der Beschleunigungsmesser sendet X-, Y- und Z-Beschleunigung Kräfte. Oft müssen wir die Kräfte jedoch in X, Y, Z 3D-Winkel umrechnen um die 3D-Orientierung zu bestimmen des Sensors. Ziemlich wenige Leute haben ein solches Tutorial angefordert, und endlich habe ich die Zeit gefunden, es zu machen.
Einige Leute fragten auch, wie Sie den MPU6050 Beschleunigungsmesser und Gyroskopsensor anschließen und verwenden können , also habe ich mich entschieden, dieses Modul für das Tutorial anstelle des komplexeren und teureren MPU9250 zu verwenden .
In diesem Tutorial zeige ich Ihnen, wie einfach es ist, den MPU6050-Beschleunigungsmesser und den Gyroskop-Sensor anzuschließen zu Arduino Nano , und programmiere es mit Visuino um die Beschleunigung umzuwandeln in einen 3D-X-, Y-, Z-Winkel .
Schritt 1:Komponenten
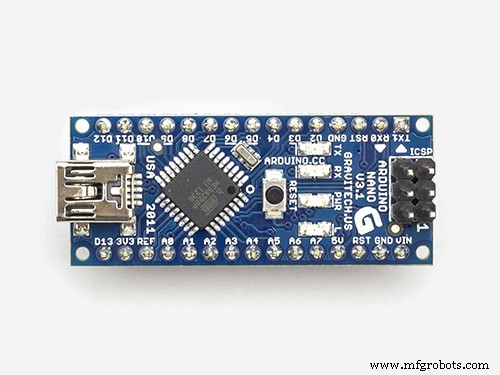
- Ein Arduino kompatibles Board (ich benutze Arduino Nano, weil ich eins habe, aber jedes andere ist gut)
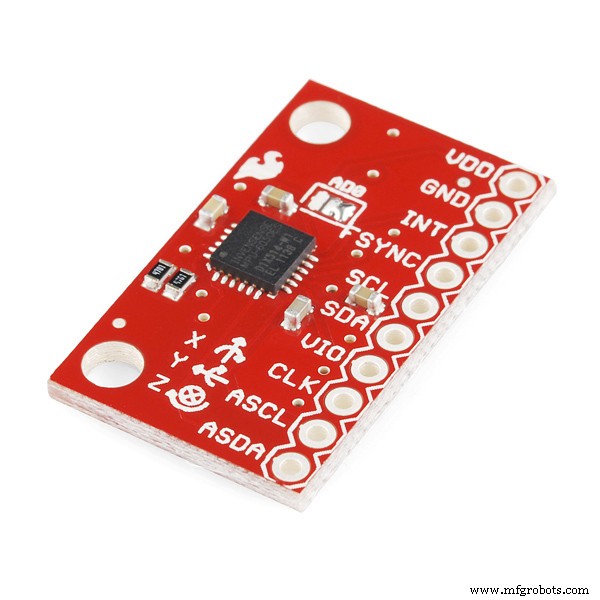
- Ein MPU6050 Beschleunigungs-Gyroskop-Sensormodul
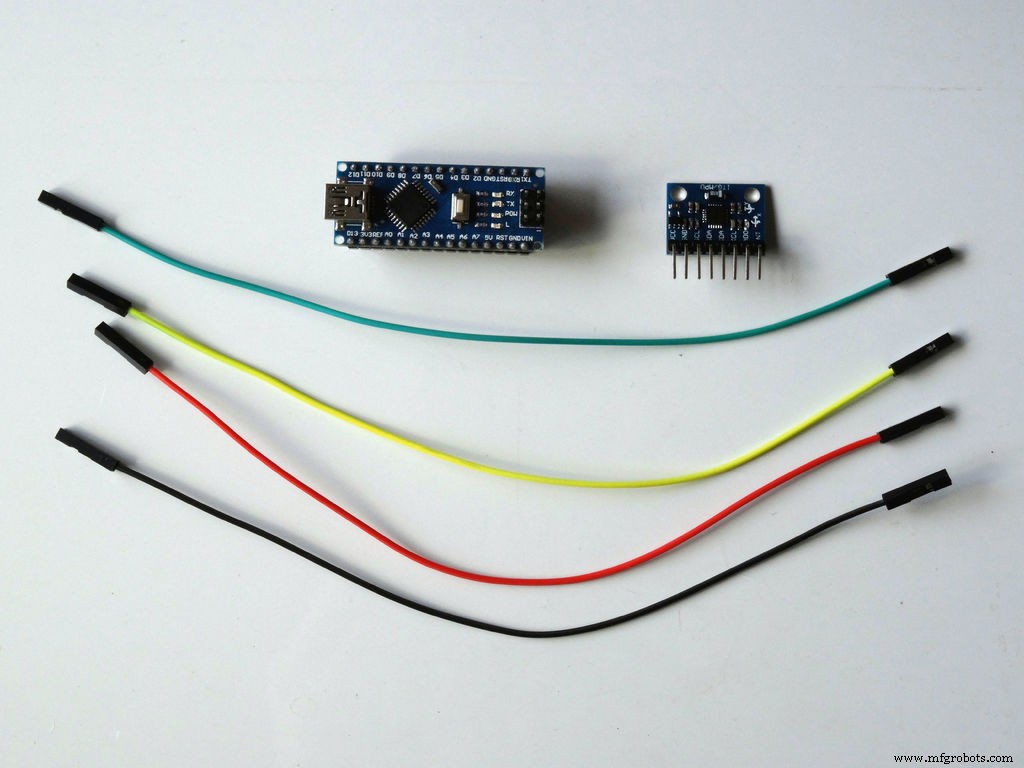
- 4 weiblich-weiblich Überbrückungsdrähte
Schritt 2:Verbinden Sie den MPU6050-Beschleunigungsmesser und das Gyroskop mit Arduino
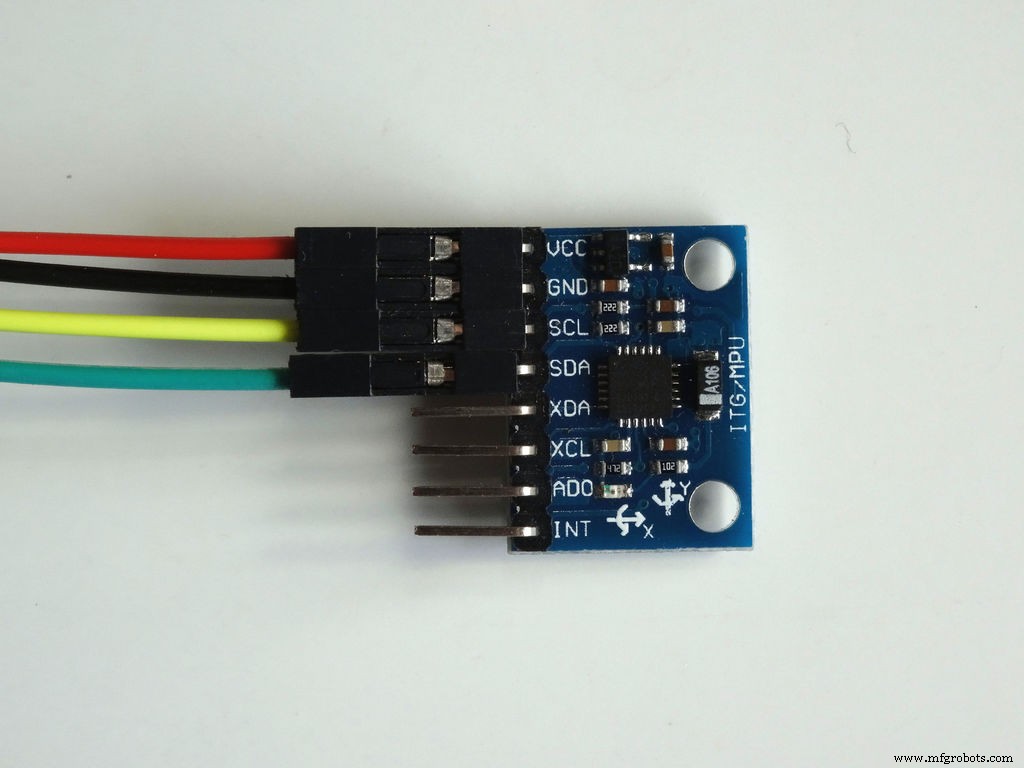
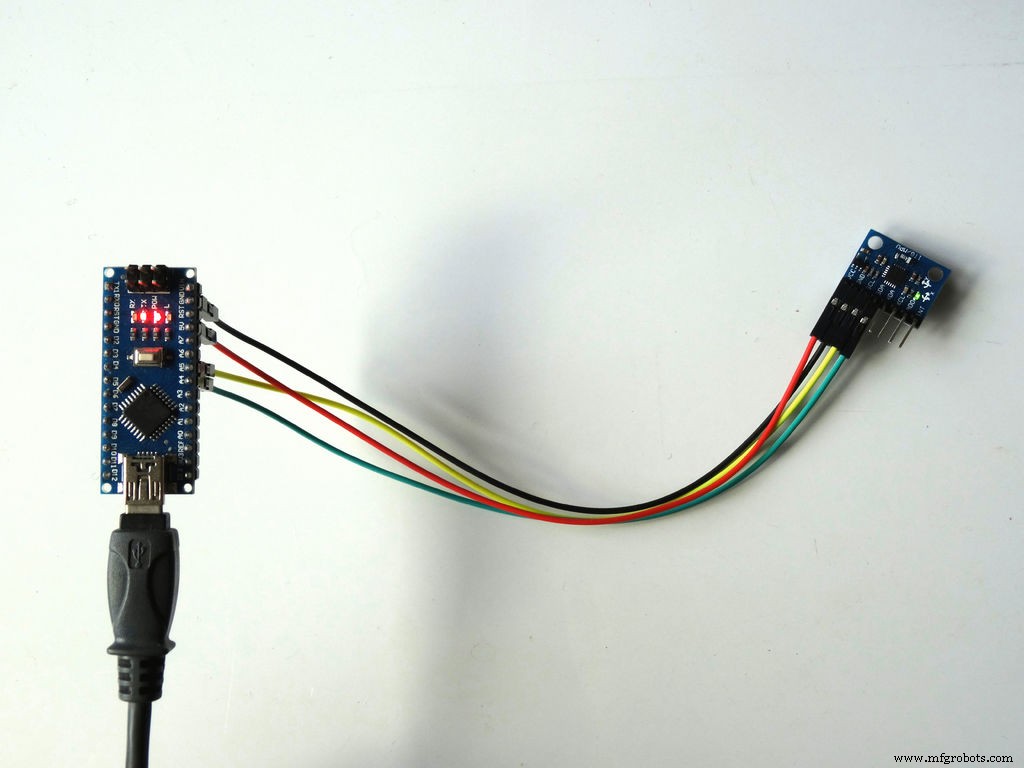
- Schließen Sie eine 5-V-VCC-Stromversorgung an (Roter Draht ), Boden (Schwarzer Draht ), SCL (Gelber Draht ) und SDA (Grünes Kabel ) zum MPU6050-Modul (Bild 1 )
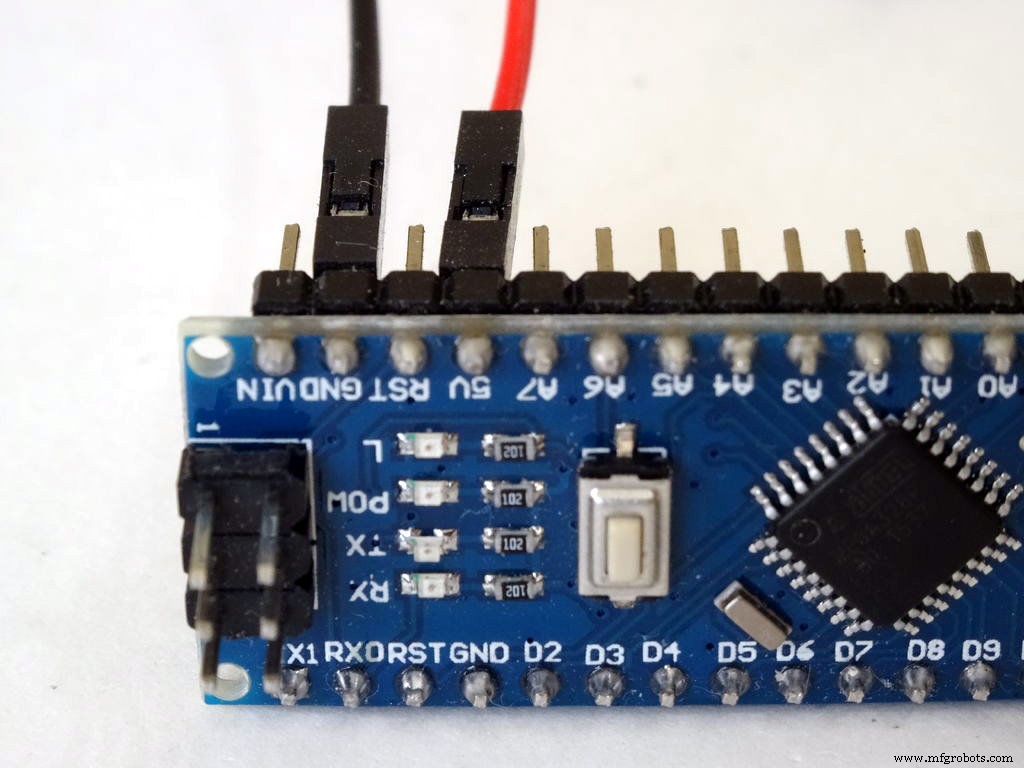
- Schließen Sie das andere Ende des Erdungskabels an (Schwarzer Draht ) zu einem Boden Pin des Arduino Nano Tafel (Bild 2 )
- Schließen Sie das andere Ende des 5-V-VCC-Stromkabels an (Roter Draht ) an die 5V Power-Pin des Arduino Nano Tafel (Bild 2 )
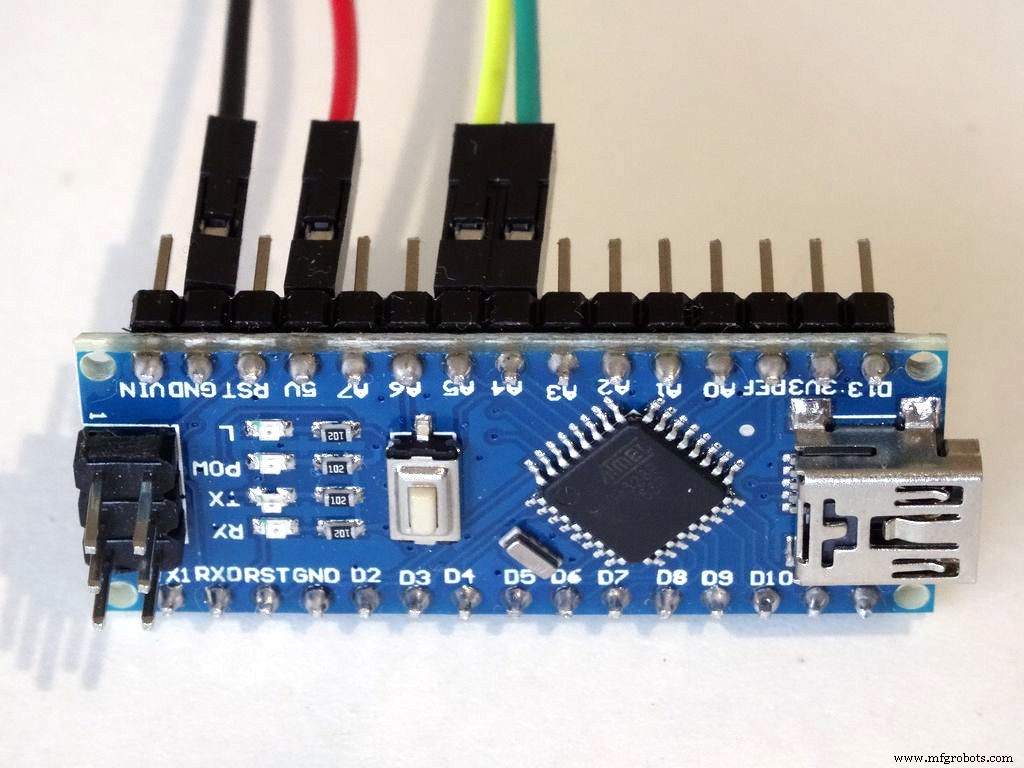
- Schließen Sie das andere Ende des SDA-Kabels an (Grünes Kabel ) an SDA/Analog-Pin 4 des Arduino Nano Tafel (Bild 3 )
- Schließen Sie das andere Ende des SCL-Kabels an (Gelber Draht ) an SCL/Analog-Pin 5 des Arduino Nano Tafel (Bild 3 )
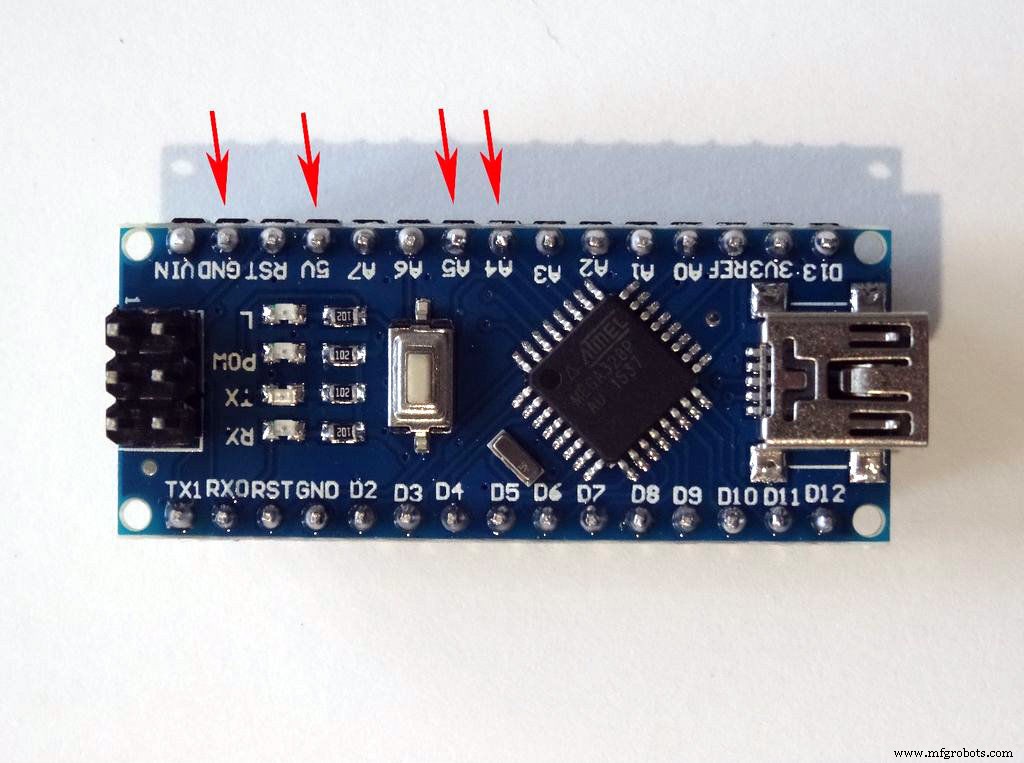
- Bild 4 zeigt, wo der Boden ist , 5V Stromversorgung, SDA/Analog-Pin 4 , und SCL/analoger Pin 5 , Pins des Arduino Nano
Schritt 3:Starten Sie Visuino und wählen Sie den Arduino-Board-Typ aus
Um mit der Programmierung des Arduino zu beginnen, benötigen Sie die Arduino-IDE installiert von hier:http://www.arduino.cc/.
Stellen Sie sicher, dass Sie 1.6.7 oder höher installieren, sonst funktioniert dieses Tutorial nicht!
Der Visuino :https://www.visuino.com muss ebenfalls installiert werden.
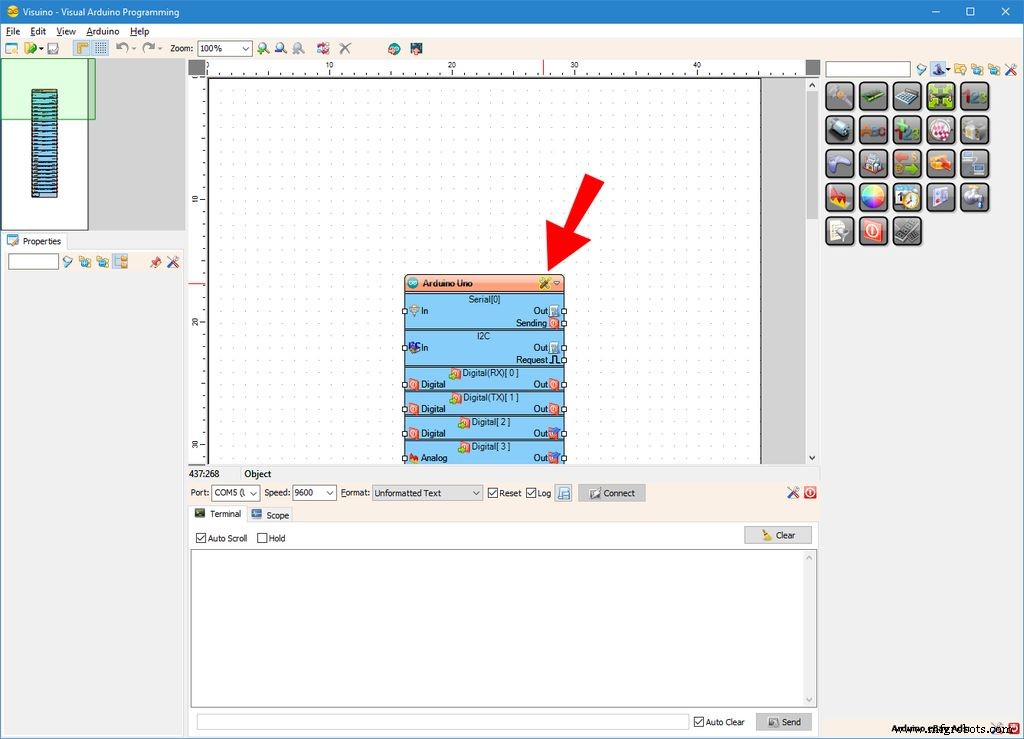
- Starte Visuino wie im ersten Bild gezeigt
- Klicken Sie auf "Tools "-Schaltfläche auf dem Arduino Komponente (Bild 1 ) in Visuino
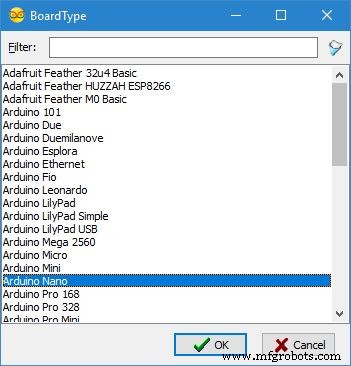
- Wenn das Dialogfeld angezeigt wird, wählen Sie Arduino Nano wie in Bild 2 gezeigt
Schritt 4:In Visuino:MPU9650 und Beschleunigung zu Winkelkomponenten hinzufügen und verbinden
Zuerst müssen wir Komponenten hinzufügen, um den MPU6050-Sensor zu steuern und die X-, Y-, Z-Beschleunigung in 3D-X-, Y-, Z-Winkel umzuwandeln:
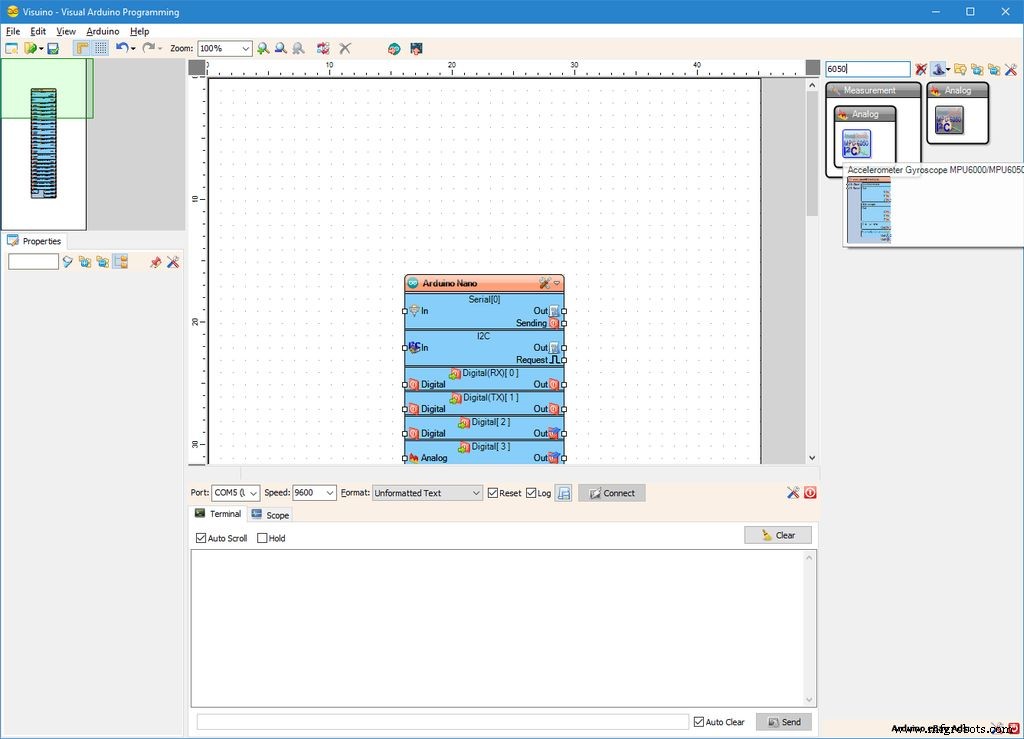
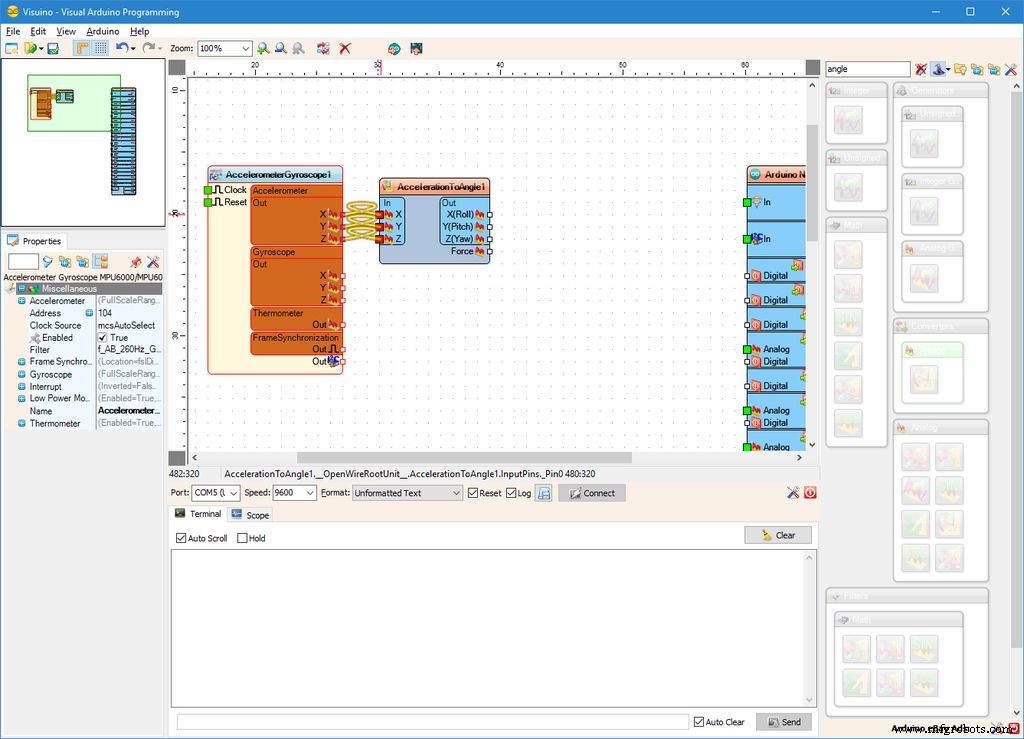
- Geben Sie "6050 . ein " im Filterfeld der Komponenten-Toolbox wählen Sie dann "Beschleunigungsmesser-Gyroskop MPU6000/MPU6050 I2C " Komponente (Bild 1 ) und legen Sie es im Designbereich ab (Bild 2 )
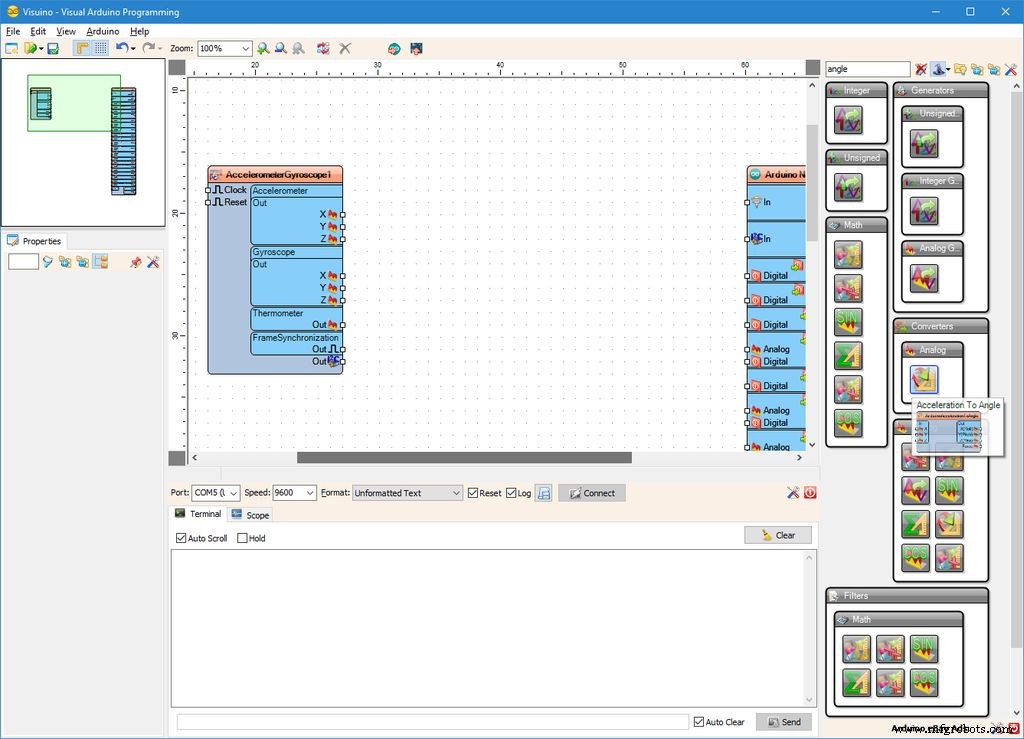
- Geben Sie "Winkel . ein " im Filterfeld der Komponenten-Toolbox und wählen Sie dann "Beschleunigung zum Winkel " Komponente (Bild 2 ) und legen Sie es im Designbereich ab (Bild 3 )
- Klicken Sie in das "Aus " Feld des "Beschleunigungsmessers " Feld mit den X, Y, X Beschleunigungsstiften des AccelerometerGyroscope1 Komponente, um alle Out-Pins auf einmal zu verbinden (Bild 3 )
- Bewegen Sie die Maus über das "X " Eingangspin des "In " Feld des AccelerationToAngle1 Komponente. Der Visuino spreizt die Drähte automatisch, sodass sie korrekt mit den restlichen Pins verbunden sind (Bild 3 )
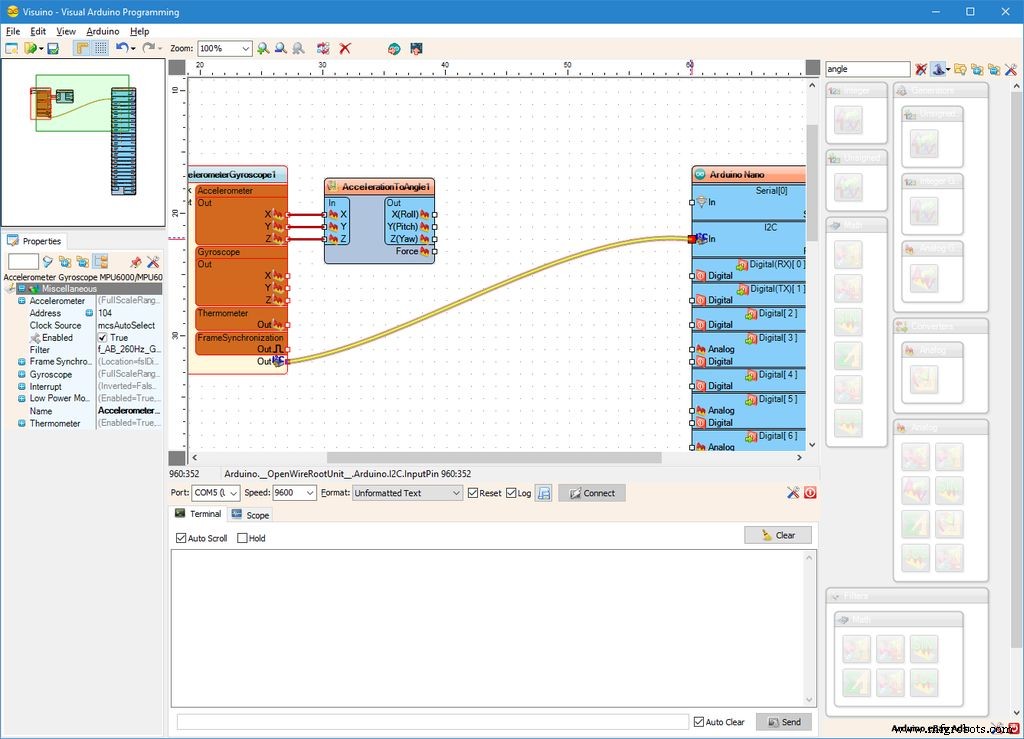
- Verbinden Sie das "Out " Pin des AccelerometerGyroscope1 Komponente zum "In " Pin des I2C Kanal des Arduino Komponente (Bild 4 )
Schritt 5:In Visuino:Paketkomponente und 3 binäre analoge Elemente hinzufügen und verbinden
Um alle Kanaldaten über den seriellen Port von Arduino zu senden, können wir die Packet-Komponente verwenden, um die Kanäle zusammenzupacken und sie im Bereich und in den Messgeräten in Visuino anzuzeigen :
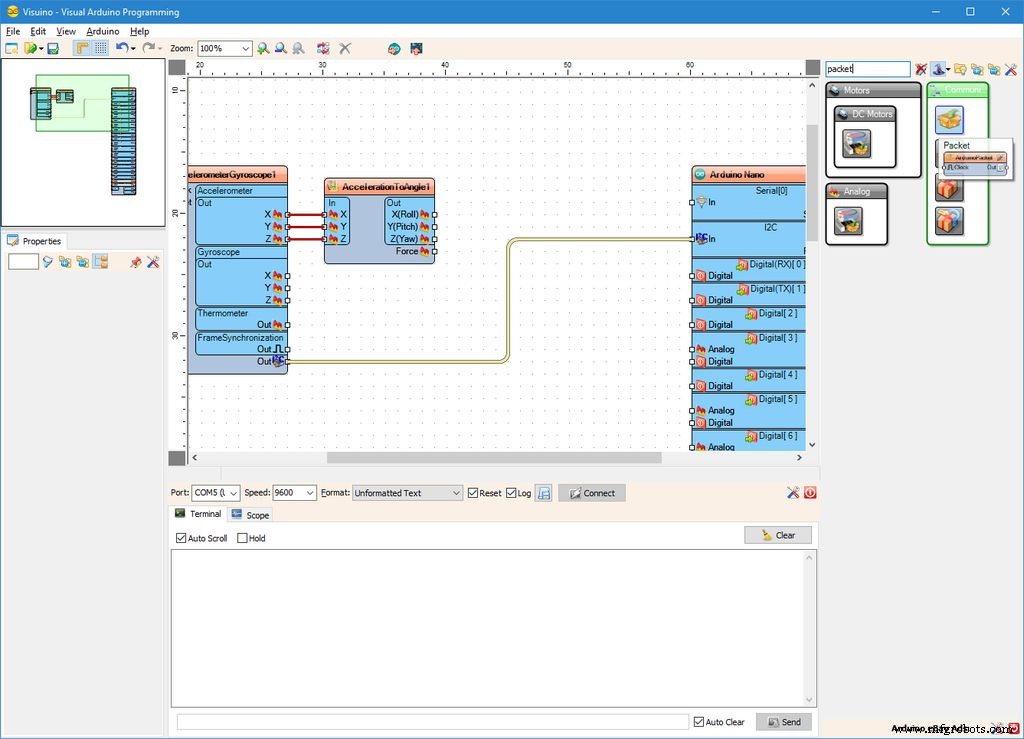
- Geben Sie "Paket . ein " im Feld Filter der Komponenten-Toolbox wählen Sie dann die Komponente "Sinus-Analog-Generator" (Bild 1 ) und legen Sie es im Designbereich ab
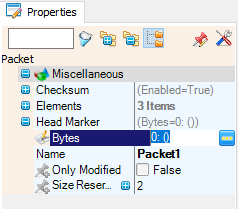
- Erweitern Sie im Objektinspektor die "Kopfmarkierung "Eigenschaft (Bild 2 )
- Klicken Sie im Objektinspektor auf "... "-Schaltfläche (Bild 2 )
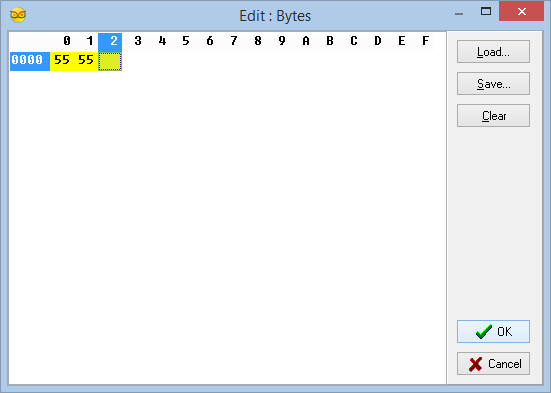
- Geben Sie im Bytes-Editor einige Zahlen ein, zum Beispiel 55 55 (Bild 3 )
- Klicken Sie auf die OK-Schaltfläche um den Editor zu bestätigen und zu schließen
Schritt 6:In Visuino:Fügen Sie 3 binäre analoge Elemente zur Paketkomponente hinzu und verbinden Sie sie
Um alle Kanaldaten über den seriellen Port von Arduino zu senden, können wir die Packet-Komponente verwenden, um die Kanäle zusammenzupacken und sie im Bereich und in den Messgeräten in Visuino anzuzeigen :
- Klicken Sie auf "Tools "-Schaltfläche des Paket1 Komponente (Bild 1 )
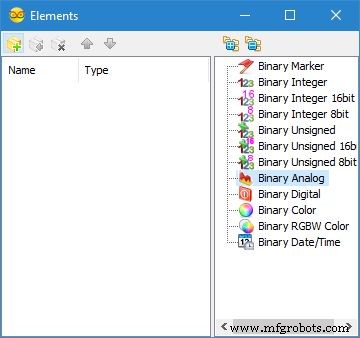
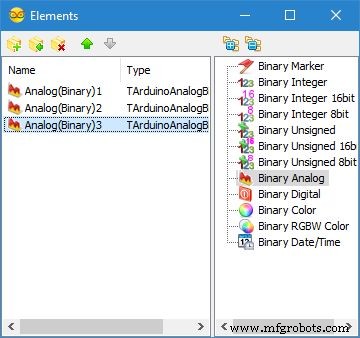
- In den "Elementen "-Editor wählen Sie "Binär-Analog ”-Element und klicken Sie dann 3 Mal auf die Schaltfläche "" (Bild 2 ), um 3 . hinzuzufügen Analoge Elemente (Bild 3 )
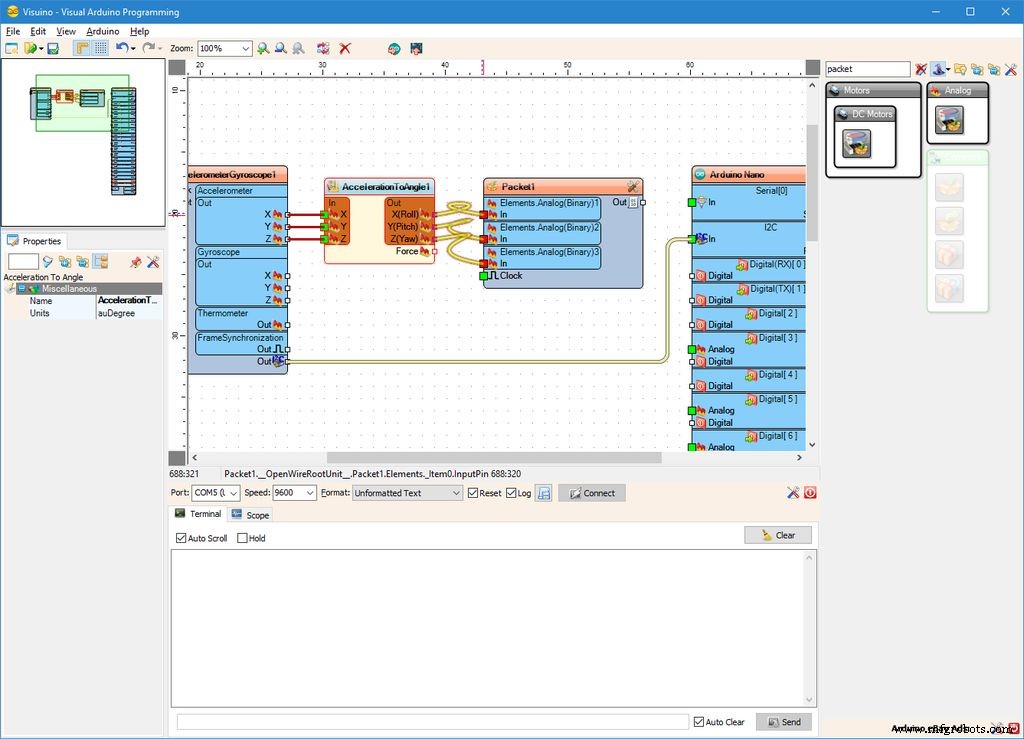
- Klicken Sie in das "Aus " Feld des "Beschleunigungsmessers " Feld mit den Pins des AccelerationToAngle1 Komponente, um alle Out-Pins auf einmal zu verbinden (Bild 4 )
- Bewegen Sie die Maus über das "In " Pin von "Elements.Analog(Binary)1 " Element des Pakets1 Komponente. Der Visuino spreizt die Drähte automatisch, sodass sie korrekt mit den restlichen Pins verbunden sind (Bild 4 )
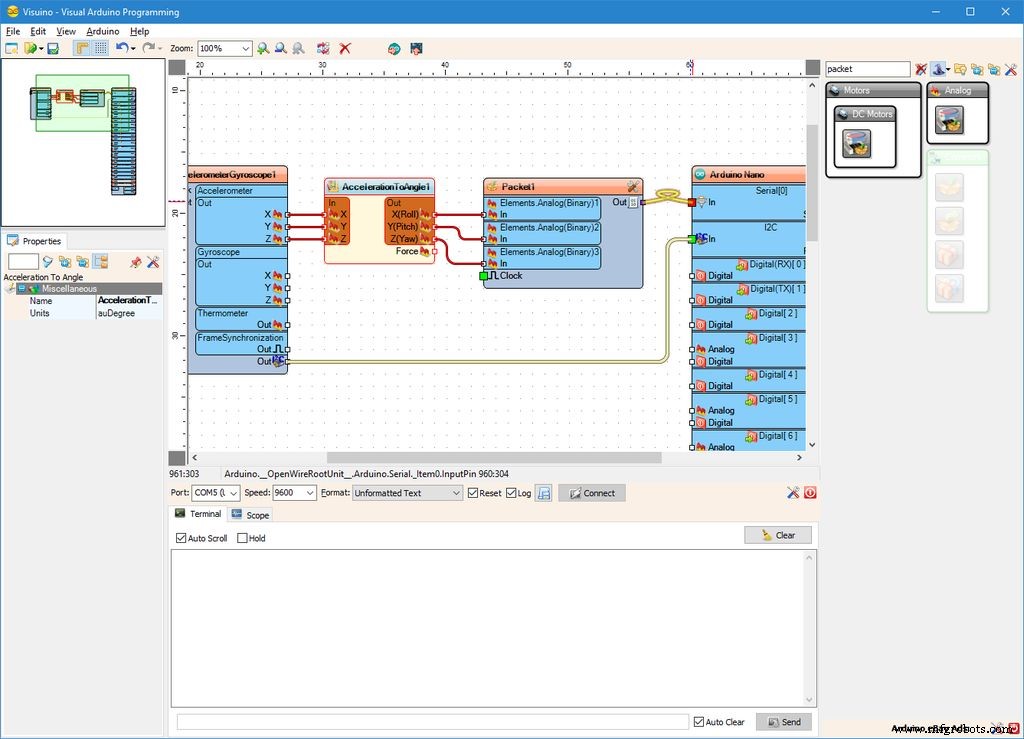
- Verbinden Sie das "Out " Ausgangspin des Packet1 Komponente zum "In " Eingangspin des "Serial[ 0 ] " Kanal des "Arduino "Komponente (Bild 5 )
Schritt 6:Arduino-Code generieren, kompilieren und hochladen


- In Visuino , Drücken Sie F9 oder klicken Sie auf die Schaltfläche in Bild 1 um den Arduino-Code zu generieren und die Arduino-IDE zu öffnen
- In der Arduino-IDE , klicken Sie auf Hochladen Schaltfläche, um den Code zu kompilieren und hochzuladen (Bild 2 )
Schritt 7:Und spielen ...
Sie können den angeschlossenen und laufenden MPU6050-Beschleunigungsmesser und den Gyroskopsensor sehen auf Bild 1 .
- In Visuino Wählen Sie den seriellen Port aus und klicken Sie dann auf "Format: " Dropdown-Feld und wählen Sie Paket1 (Bild 2 )
- Klicken Sie auf "Verbinden "-Schaltfläche (Bild 2 )
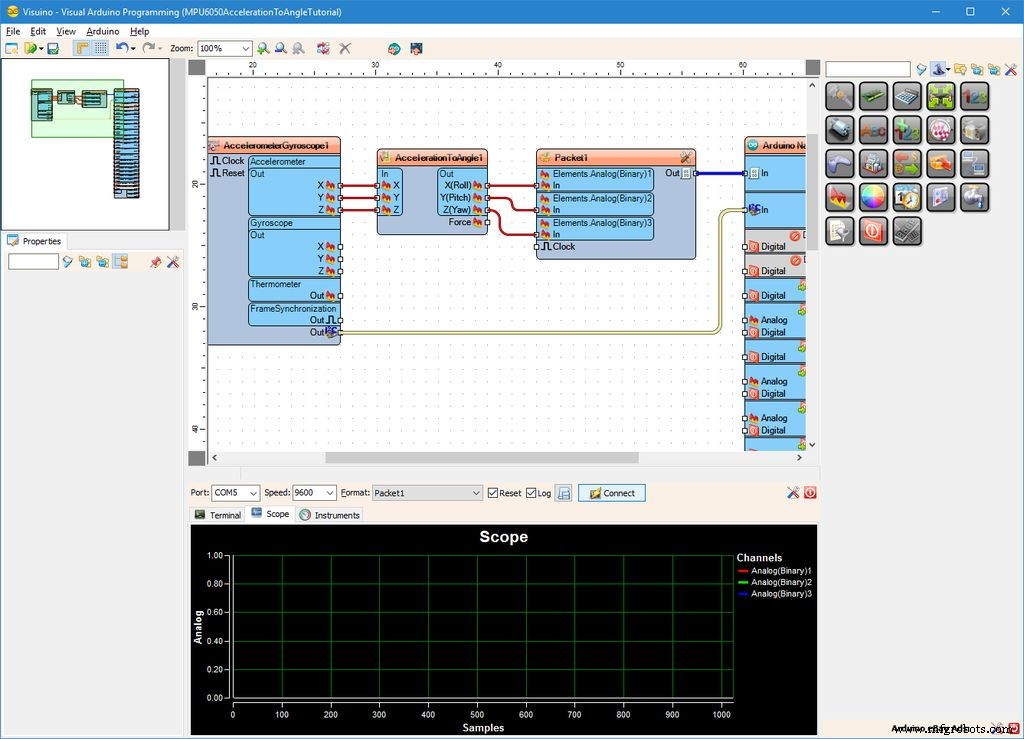
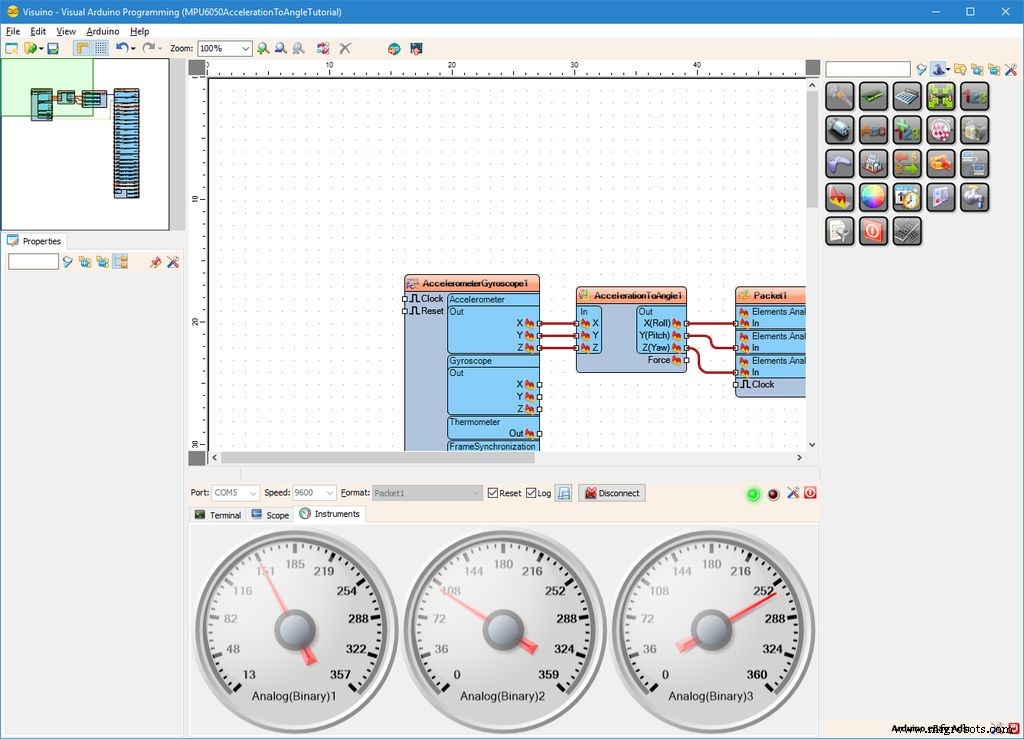
- Wenn Sie den "Bereich . auswählen "-Tab sehen Sie, dass das Oszilloskop die X,Y,Z-Winkel zeichnet im Laufe der Zeit (Bild 3 )
- Wenn Sie "Instrumente . auswählen "-Tab sehen Sie die Messgeräte mit denselben Informationen (Bild 4 )
Sie können den Sensor im Video in Aktion sehen .
Herzlichen Glückwunsch! Sie haben ein Visuino erstellt Projekt, das Beschleunigung in Winkel umwandelt von MPU6050 Beschleunigungsmesser und Gyroskopsensor .
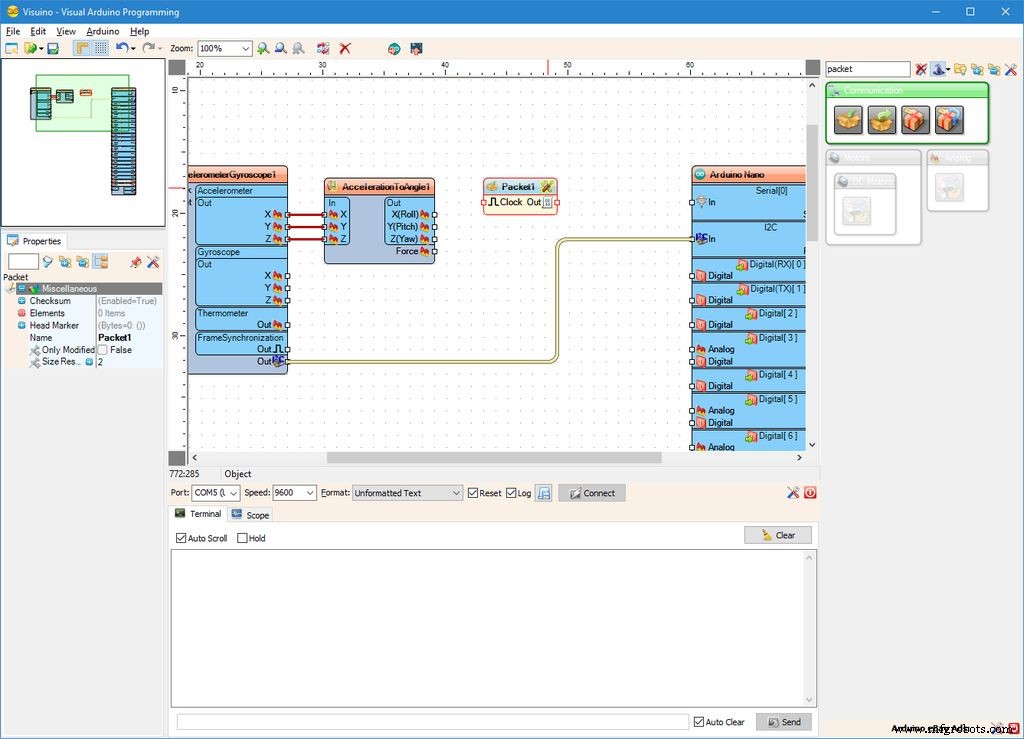
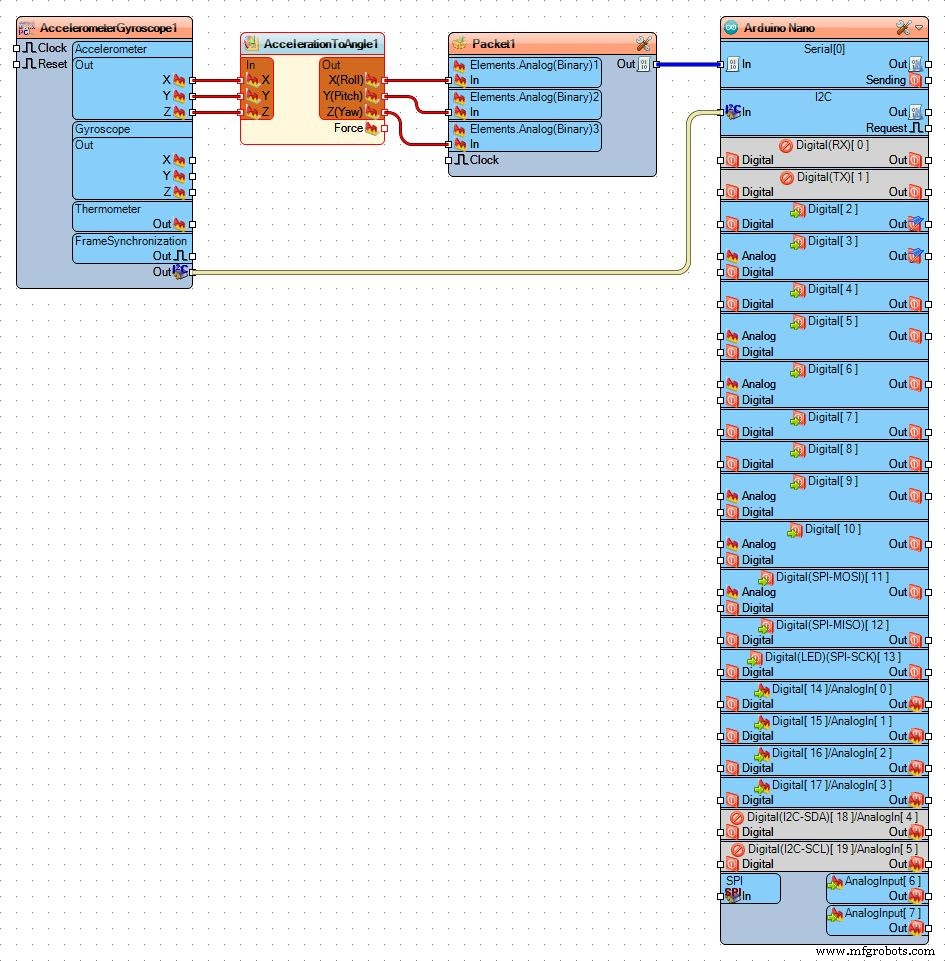
Auf Bild 5 Sie können das komplette Visuino sehen Diagramm.
Ebenfalls beigefügt ist das Visuino Projekt, das ich für dieses Tutorial erstellt habe. Sie können es herunterladen und in Visuino öffnen :https://www.visuino.com
Code
- MPU6050AccelerationToAngleTutorial
MPU6050AccelerationToAngleTutorialArduino
Visuino-Projekt abschließenKeine Vorschau (nur Download).
Herstellungsprozess
- Funktionsweise und Anwendungen von Beschleunigungssensoren
- Optimierung der hochpräzisen Neigungs-/Winkelerfassung:Grundlagen des Beschleunigungssensors
- Himbeer-Pi-Temperaturlogger
- BMP180 I2C Digitaler barometrischer Drucksensor
- Senden Sie Sensordaten von einem Arduino zu einem anderen mit Firebase
- CO2-Überwachung mit K30-Sensor
- Wie groß bist du?
- Kapazitiver Fingerabdrucksensor mit einem Arduino oder ESP8266
- Arduino Cloud Sensor Tower
- Bewegungssensor-Wasserpistole