


Essensroboter mit Arduino Nano herstellen | Goldschraube
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
|
Apps und Onlinedienste
 |
| |||
 |
|
Über dieses Projekt
Die Idee zu diesem Projekt kam von meiner Tochter.
Sie will einen Roboter, und dieser Roboter kann seinen Mund öffnen, damit er Essen in den Mund stecken kann.
Also suchte ich drinnen nach verfügbaren Dingen:Pappe, Arduino Nano, Ultraschallsensor, Servomotor ... um in der Lage zu sein, einen Roboter für Mädchen zum Spielen in der schnellsten Zeit und zu den geringstmöglichen Kosten zu entwickeln.
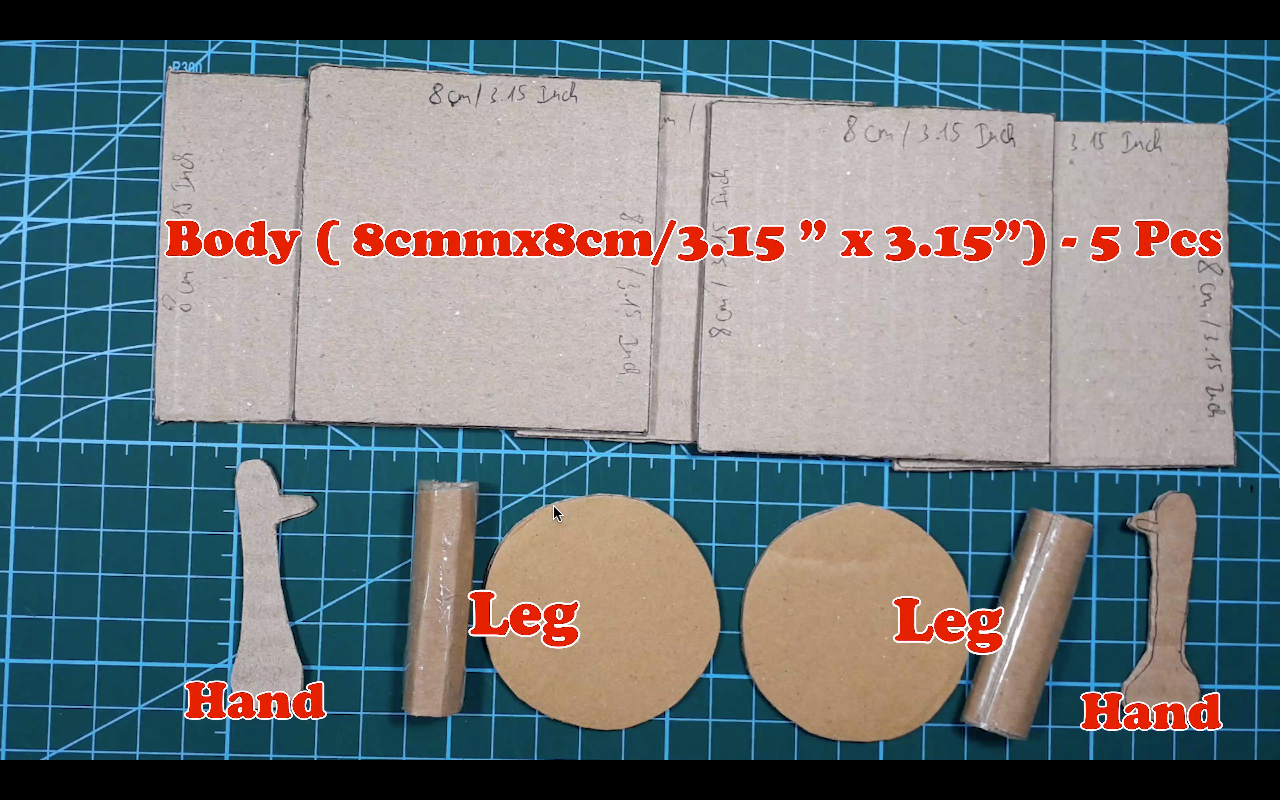
Körper erstellen
Ich verwende Pappe, um einen Roboter zu bauen
Mit Heißkleber alle Teile verbinden
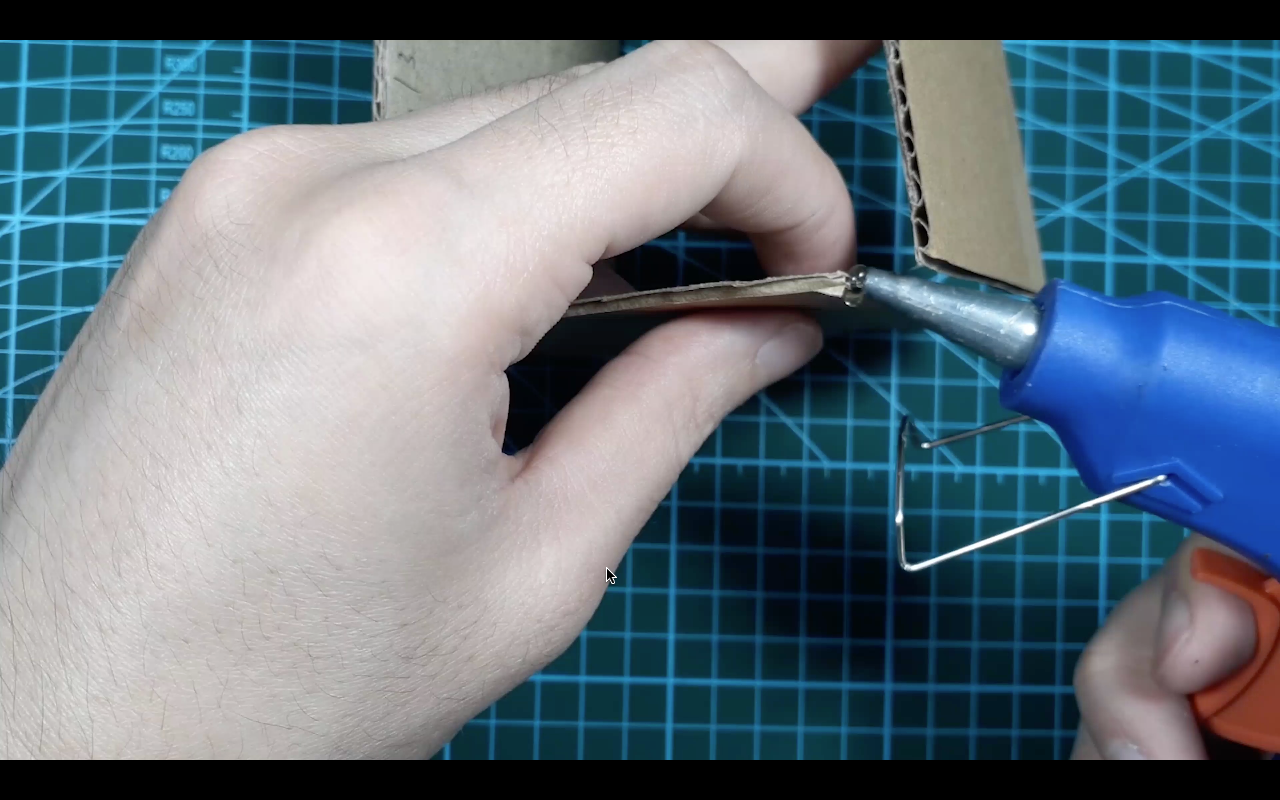
Das meiste vom Körper gemacht

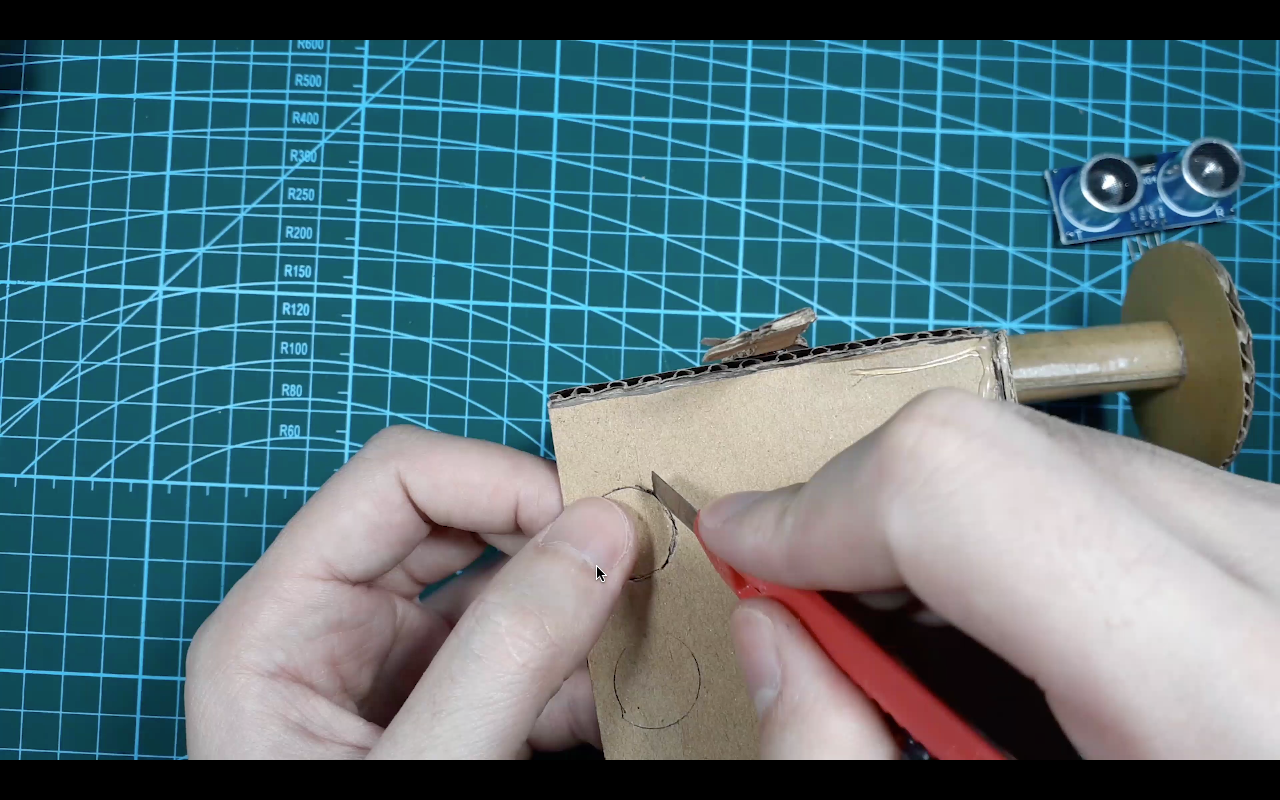
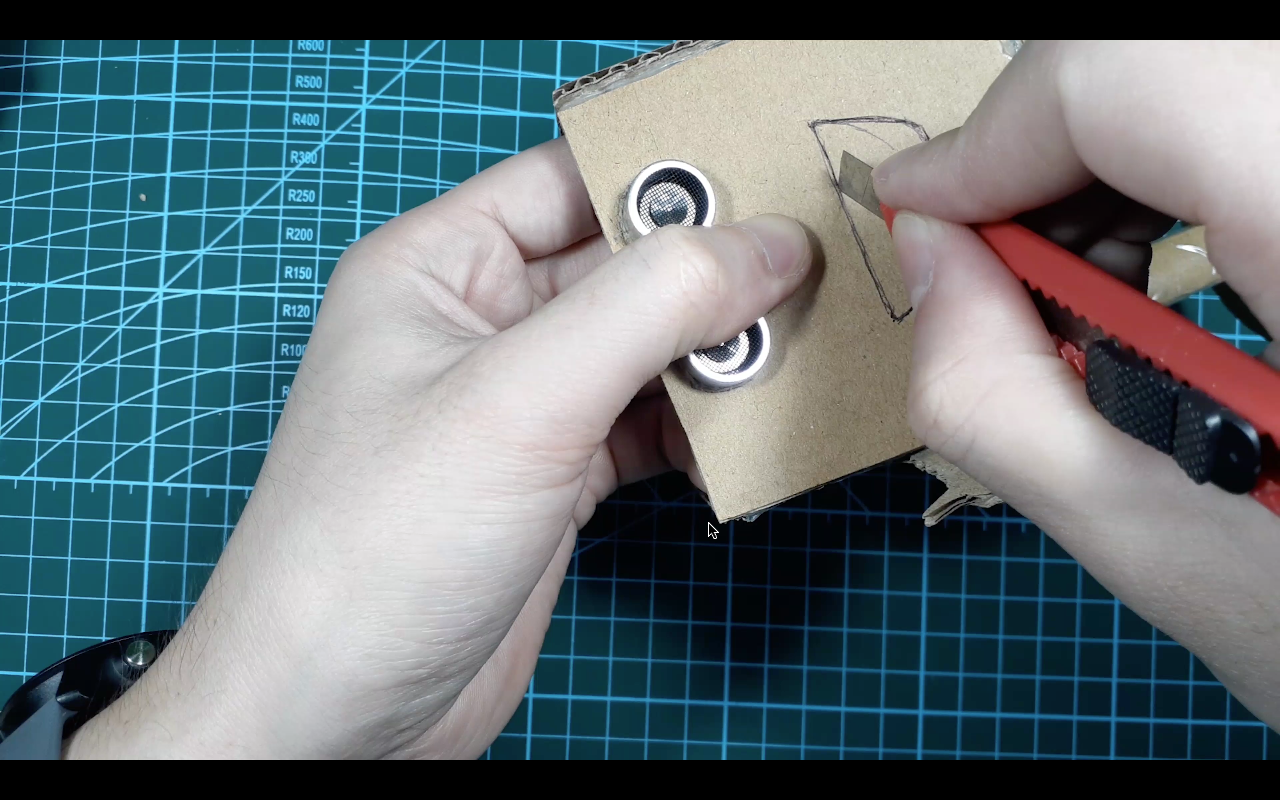
Augenlöcher machen
Mund machen
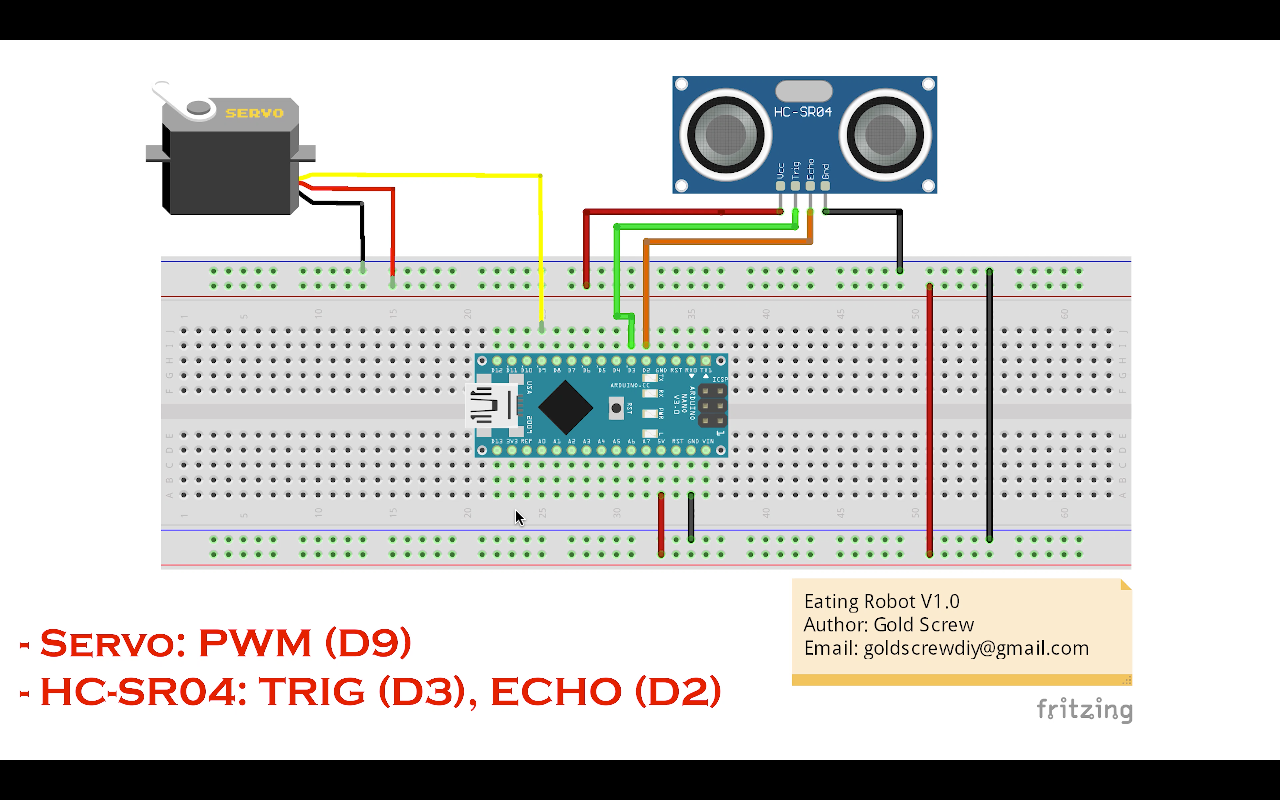
Anschlussplan Komponenten/Teile
Schließen Sie die USB-Stromversorgung an
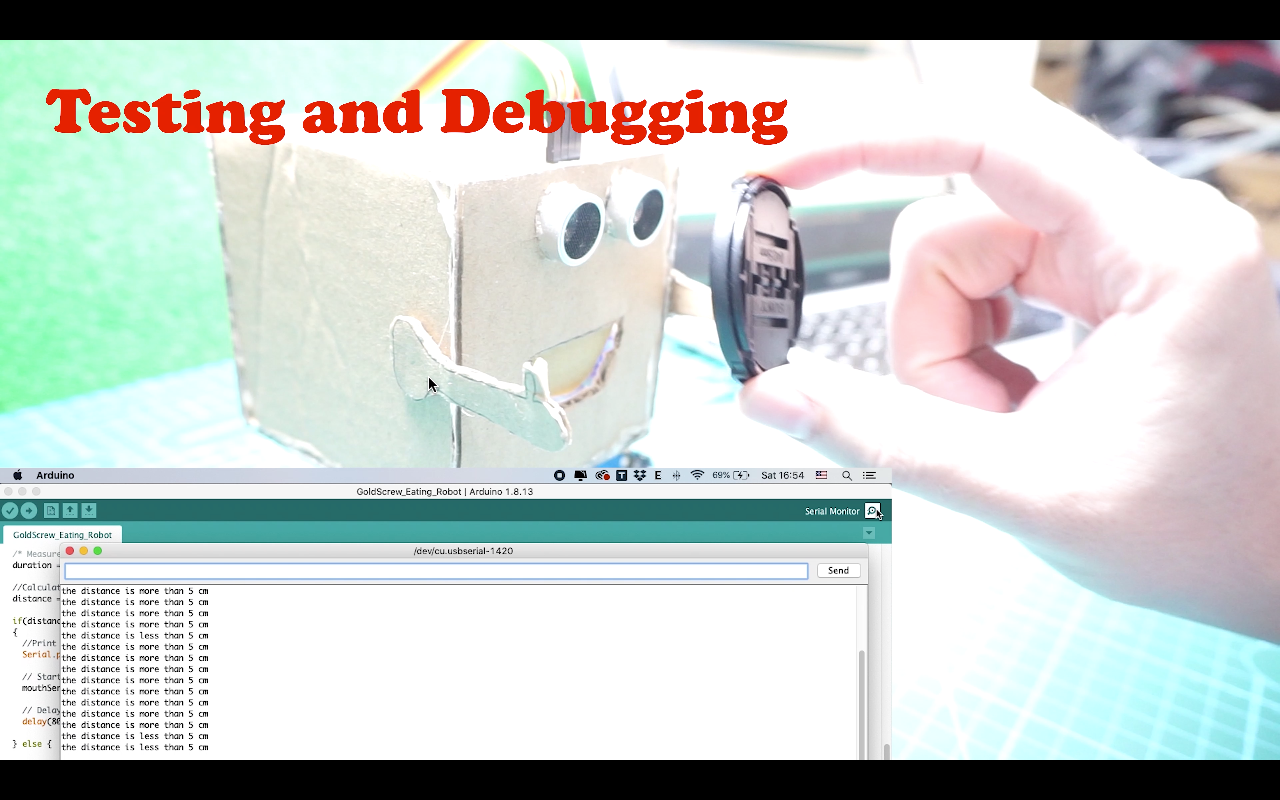
Testen und Debuggen
Es ist vollbracht!

Code
- GoldScrew_EatingRobot.ino
GoldScrew_EatingRobot.inoArduino
/* * Karton fressender Roboter * Autor:GoldScrew * E-Mail:[email protected] * Beschreibung:Es verwendet HC-SR04 (Erkennung von Lebensmitteln mit Abstand <=5 cm) und Server (zum Öffnen und Schließen des Mundes) * / #include#define SERVO_PIN 9 // Setze Pin 9 für Servo // HC-SR04 Ultraschallsensorconst int trig =3; // trig von HC-SR04const int echo =2; // Echo von HC-SR04 // ServoServo MouthServo;void setup () { // Serielle Verbindung mit Baudrate 960 Serial.begin (9600); // Signal mit TRIG senden pinMode (trig, OUTPUT); // Empfangssignal mit ECHO PinMode (Echo, INPUT); // Mundserver MouthServo.attach(SERVO_PIN); MundServo.write(90); }void loop(){ /* Dauer */ unsigned lange Dauer; int-Abstand; // Distanz /* Signal vom TRIG-Pin senden */ digitalWrite (trig, 0); // Trigger-Pin-Verzögerung stoppenMicroseconds (2); // Verzögerung 2 Mikrosekunden digitalWrite (trig, 1); // Signal vom TRIG-Pin senden delayMicroseconds (10); // Verzögerung 10 Mikrosekunden digitalWrite (trig, 0); // Trigger-Pin stoppen /* HIGH-Pulsbreite am ECHO-Pin messen */ Dauer =pulseIn (echo, HIGH); // Distanz berechnen Distanz =int (Dauer/2/29.412); if (Abstand <=5) {//Druckabstand Serial.println ("der Abstand ist weniger als 5 cm"); // Mund öffnen MundServo.write (0); // Verzögerungsverzögerung (1200); } Else {//Druckabstand Serial.println ( "der Abstand beträgt mehr als 5 cm"); // Schließen Sie den Mund MouthServo.write (90); } // Verzögerungsverzögerung (200);}
Schaltpläne
Herstellungsprozess
- Arduino-Gyroskop-Spiel mit MPU-6050
- Unopad - Arduino MIDI-Controller mit Ableton
- Hindernisse vermeiden Roboter mit Servomotor
- Einfacher Hindernissensor mit Arduino
- Arduino Nano:Steuerung von 2 Schrittmotoren mit Joystick
- Arduino-gesteuerter Klavierroboter:PiBot
- Handheld-Geigerzähler mit Arduino Nano
- Wie man mit einem Arduino Musik macht
- Wie erstelle ich eine Arduino-basierte automatische Türöffnung
- Steuern Sie den Arduino-Roboterarm mit der Android-App