


3D-gedruckter Schrittmotor
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 6 | ||||
| × | 8 | ||||
| × | 4 | ||||
| × | 1 |
Über dieses Projekt
https://www.youtube.com/embed/v2FNUNALSTwIch bin kürzlich auf dieses anweisbare eines 3D-gedruckten Gleichstrommotors gestoßen und dachte, ich könnte es einen Schritt . machen weiter; Buchstäblich. Ich habe diesen Schrittmotor mit acht Elektromagneten, sechs Neodym-Magneten, mit einem 3D-gedruckten Rotor- und Statorgehäuse entworfen. Dies ist speziell ein Permanentmagnet-Schrittmotor, der 15-Grad-Vollschritte und 7,5-Grad-Halbschritte ausführen kann. Es gibt viele verschiedene Arten von Schrittmotoren, aber die meisten funktionieren sehr ähnlich wie der, den ich hier entworfen habe. Dies ist eine pädagogische Anzeige, um anderen zu zeigen, wie Schrittmotoren funktionieren. Ich habe dies für den Betrieb mit einem 5-12-VDC-Netzteil entworfen, damit es mit den meisten USB-Netzteilen funktioniert.
Ich mache auch ein Gewinnspiel auf meinem Youtube-Kanal. Ich werde ein Arduino, in diesem Projekt verwendete Transistoren und einige Schalter verschenken. Weitere Details im letzten Schritt.
Schritt 1:Was Sie brauchen
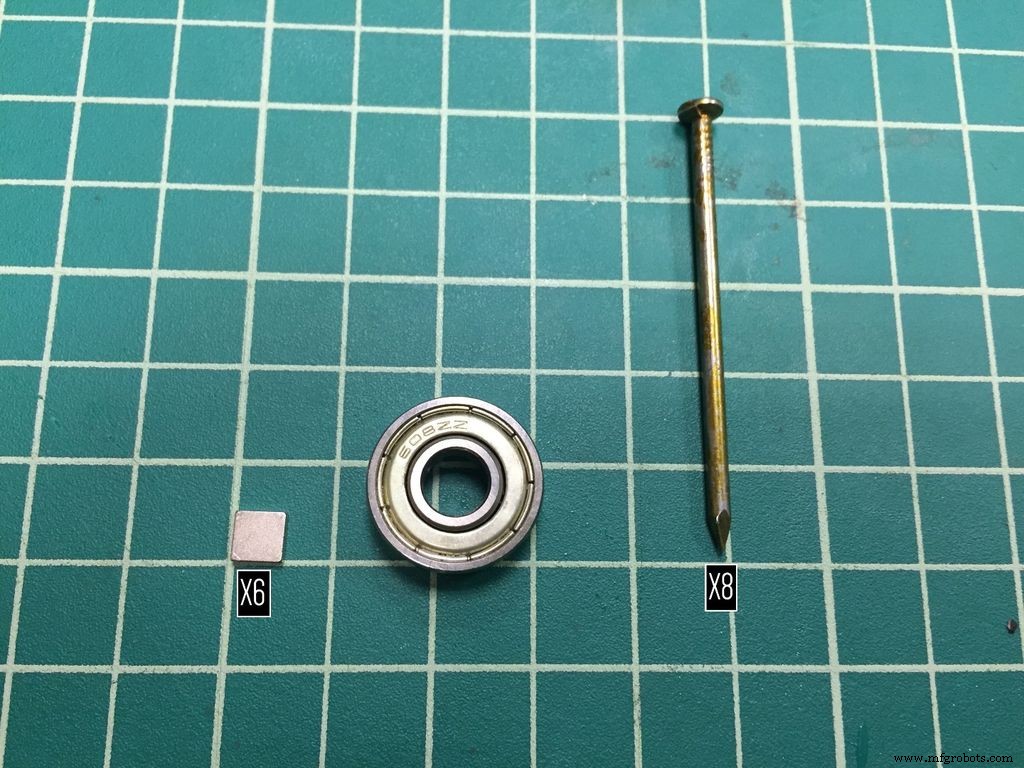


- Sechs 1/4" Neodym-Magnete
- 608ZZ Lager
- Acht 8d 2-3/8"-Nägel - Unkritisch, welche Nägel Sie verwenden, solange sie passen.
- Magnetdraht - Ich habe 0,315mm Magnetdraht verwendet, aber das ist nicht kritisch.
- Arduino Uno
- Vier Transistoren - Ich habe PNP-Transistoren verwendet, die ich herumliegen hatte, aber Sie können beliebige Transistoren oder MOSFETS verwenden, solange Sie sicherstellen, dass sie den Strom verarbeiten können, den Ihr Motor ziehen wird. Lesen Sie das Datenblatt sorgfältig durch, um spezifische Empfehlungen zu erhalten. Bei 5 V zieht der Minenmotor etwa 1 Ampere und bei 12 V benötigt er etwa 3 Ampere.
- 3D-gedruckter Rotor und Stator
- Kleber
- Elektrisches Band
- Ein Kompass
Schritt 2:Drucken Sie den Dodecagon Rotor und Octagon Stator
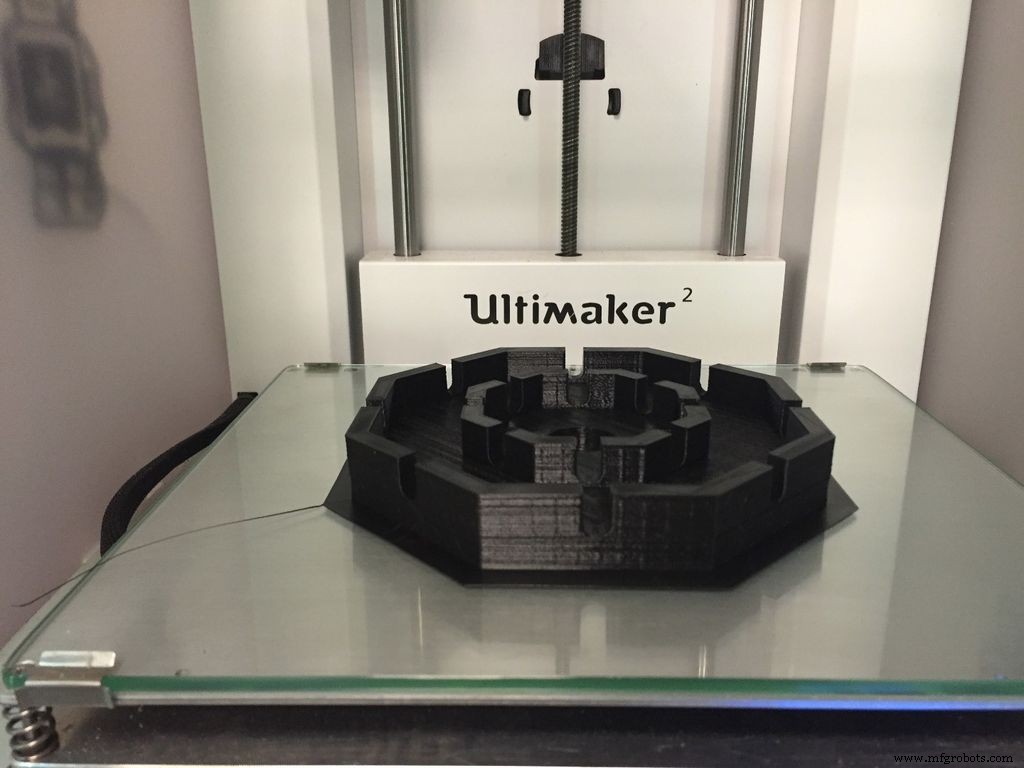
Drucken Sie mit 3D-Hubs!
Schritt 3:



Bestimmen Sie mit einem Kompass die Pole Ihrer Magnete und kleben Sie die Magnete mit den Nordpolen nach außen. Wenn Ihre Magnete stark genug sind, zeigt Ihnen der Kompass bei einigen Smartphones die Polarität der Magnete an.
Schritt 4:
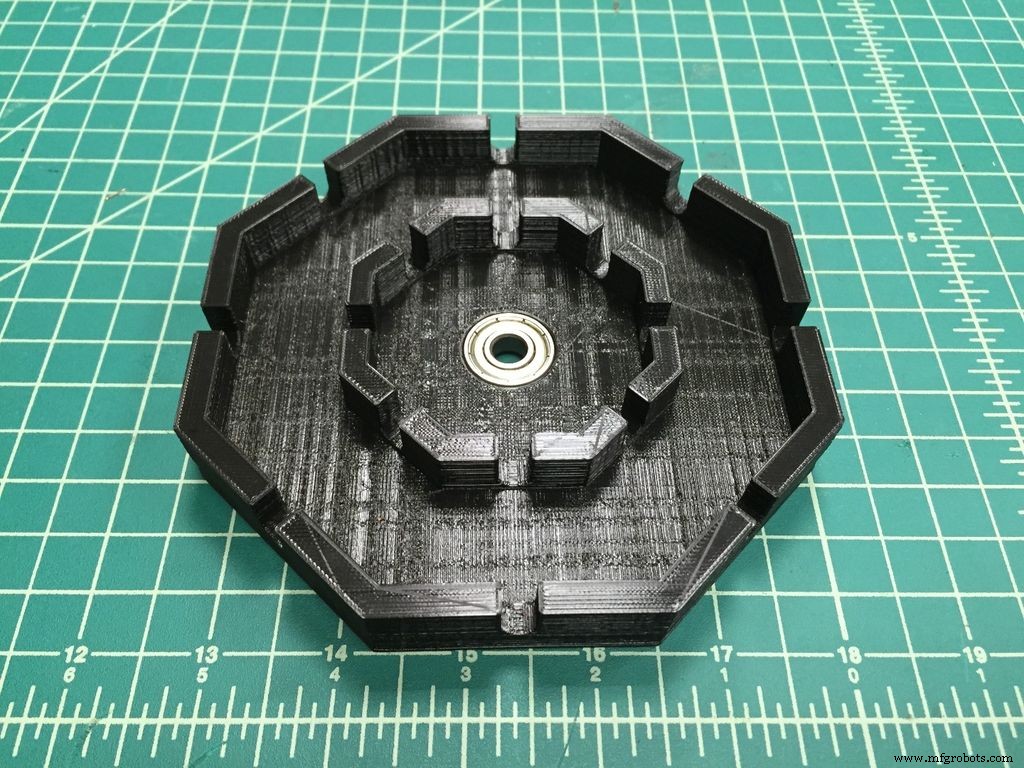

Das Lager in den Stator einpressen und dann den Rotor in das Lager drücken. Ich war angenehm überrascht, wie gut die Lagerpressung in den Stator passt. Beim 3D-Druck neigen Löcher dazu, nach innen zu schrumpfen und kleiner zu werden als erwartet, daher überdimensioniere ich sie normalerweise etwas.
Schritt 5:
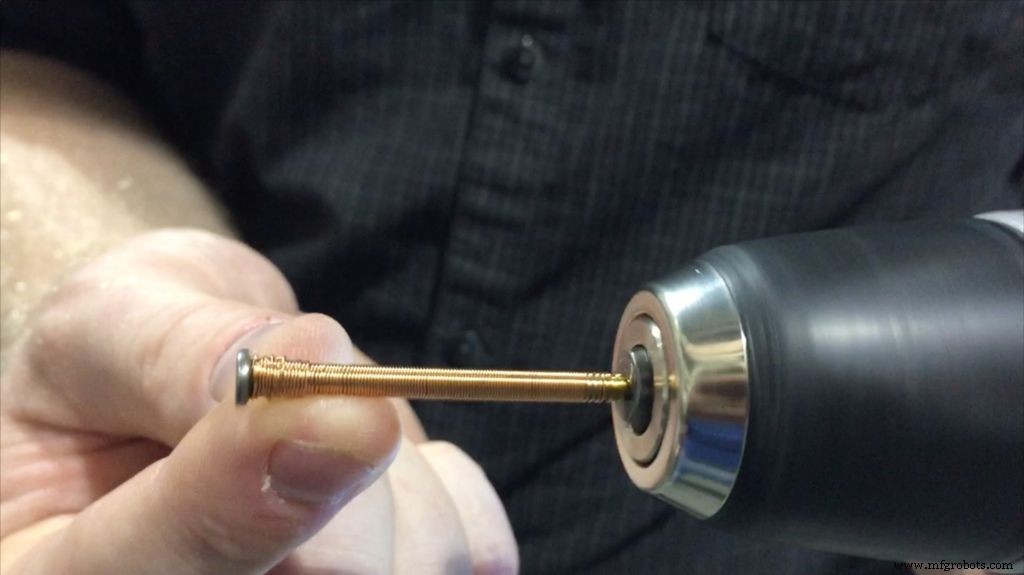

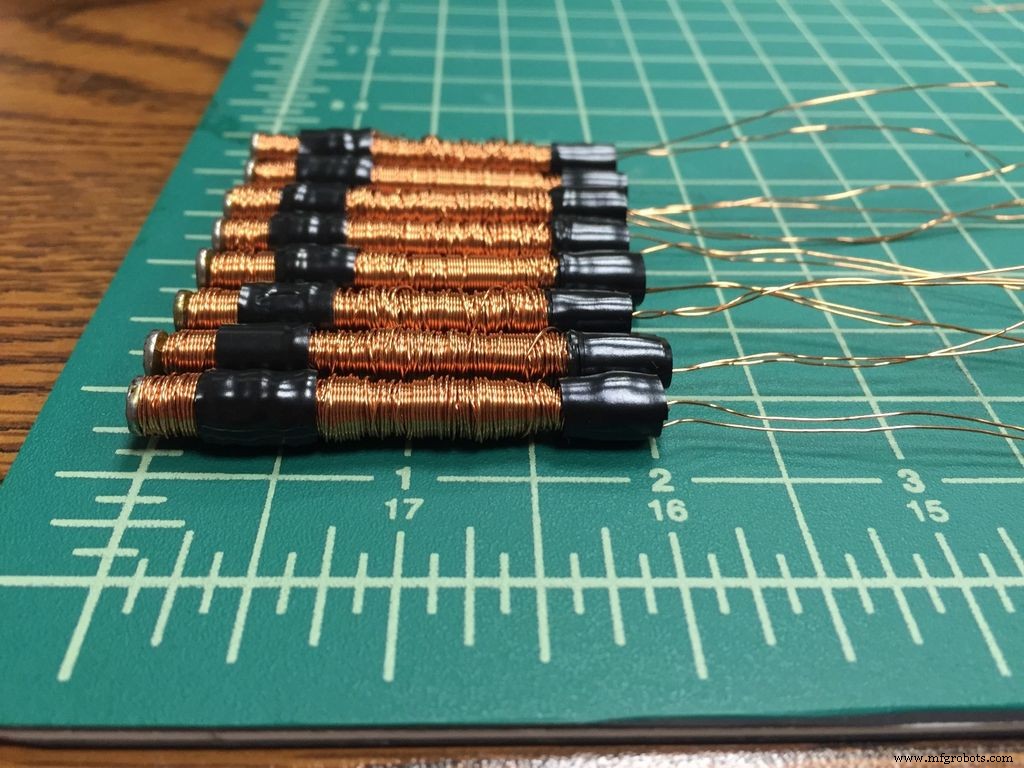
Schneiden Sie 9 Drahtstücke auf 25 Fuß ab und wickeln Sie sie mit einem Bohrer auf. Verwenden Sie einen Kompass und eine Batterie, um die erforderliche Konfiguration zu bestimmen, um den Südpol am Kopf des Nagels zu erhalten. Verwenden Sie einen Marker oder einen Schrumpfschlauch, um den negativen Anschluss Ihrer Elektromagneten zu markieren. Wickeln Sie die Abschnitte der Elektromagneten mit Isolierband um, wo sie mit dem Statorgehäuse in Kontakt kommen. Dies dient zwei Zwecken. Es hält die Elektromagnete fest an Ort und Stelle und isoliert auch das Gehäuse vor jeglicher Hitze, die die Spule erzeugen kann. Die Spulenpaare ziehen mit dem von mir verwendeten 5V-Netzteil etwa 1 Ampere. Die von mir gewählten Transistoren können mit einer 12-V-Stromversorgung umgehen, aus der die Spulen etwa 3 Ampere ziehen. Das Problem mit der höheren Spannungsversorgung ist, dass die Spulen warm werden, wenn ich sie etwas laufen lasse.
Warnung:
Ich habe dies so konzipiert, dass es mit einem 5-12 VDC Netzteil betrieben wird. Wenn Sie sich entscheiden, den ausgetretenen Pfad zu verlassen, verwenden Sie das Ohmsche Gesetz, um die gewünschte Spulengröße zu bestimmen. V =I*R
Denken Sie daran, je weniger Windungen auf Ihrer Spule sind, desto geringer ist der Widerstand. Wenn Sie nicht aufpassen, ziehen Ihre Spulen mehr Strom, als Ihr Netzteil oder Ihre Transistoren verarbeiten können, und es passieren schlimme Dinge.
Schritt 6:
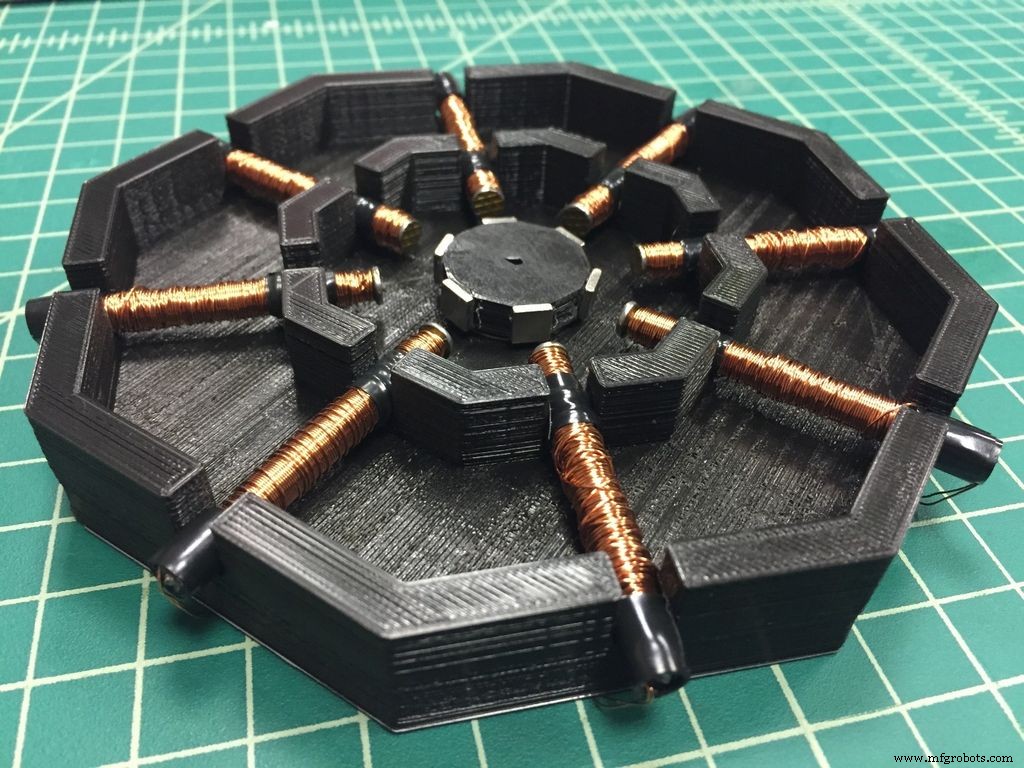
Schieben Sie die Elektromagnete in den Stator, bis sie etwa 1/4 "von den Neodym-Magneten entfernt sind. Sie können die Elektromagneten nach Belieben hinein- und herausschieben, aber ich wollte sie nicht zu nah, da die Nägel viel schneller magnetisiert werden. Das ist der Nachteil der Nägel. Der Motor funktioniert noch, wenn sie magnetisiert sind, aber er ist weniger effizient. Schweißstäbe sind eine gute Alternative zu den Nägeln, wenn Sie etwas herumliegen haben.
Schritt 7:Alles zusammenlöten
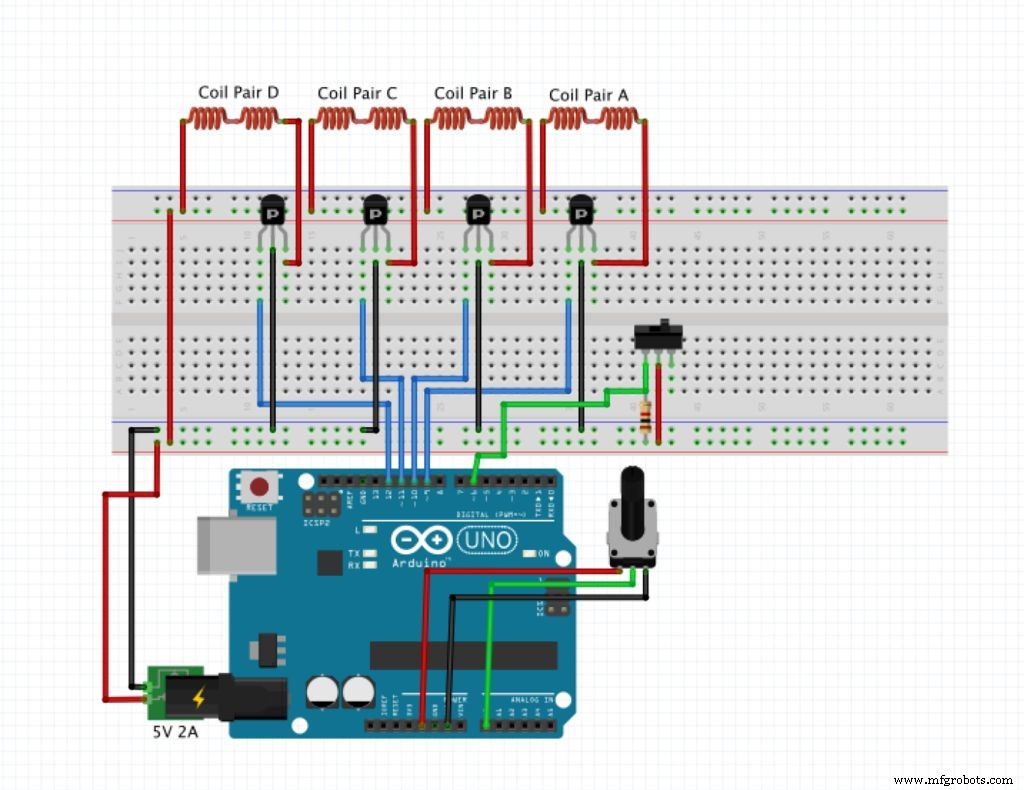
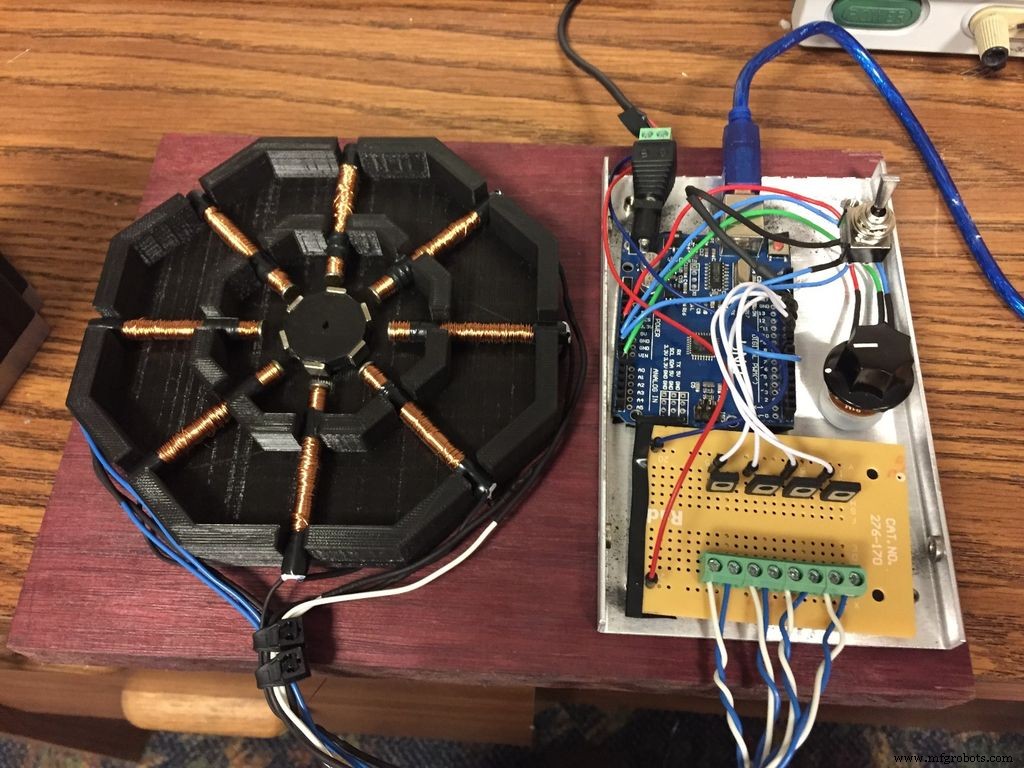
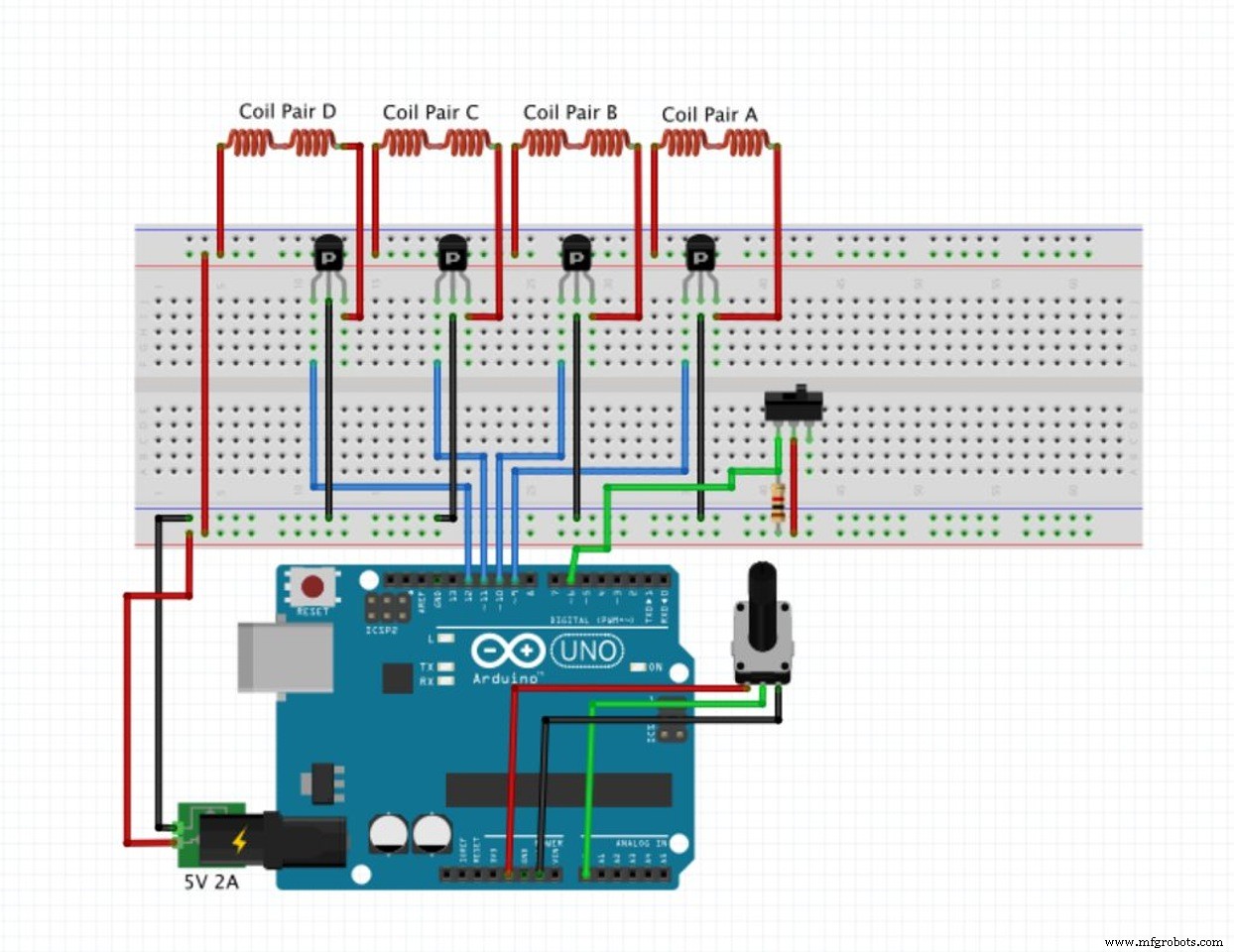
Verdrahten Sie Ihre Spulenpaare in Reihe und verbinden Sie sie so, dass alle Südpole der Elektromagneten nach innen zeigen. Der Widerstand, den ich im Schaltplan verwendet habe, ist ein 1k-Widerstand. Der Zweck hiervon besteht darin, zu verhindern, dass der digitale Pin in der Aus-Position hoch "schwebt". Stellen Sie auch hier sicher, dass Sie einen Transistor verwenden, der den Strom halten kann, den Ihre Spulen fordern.
Laden Sie den Quellcode in Ihr Arduino und Sie können loslegen!
Schritt 8:Zahle es weiter!

Ich werde ein Arduino verschenken, die in diesem Projekt verwendeten Transistoren, zusammen mit einigen Schaltern und Überbrückungsdrähten.
Regeln für das Gewinnspiel:
Abonnieren Sie meine YouTube-Kanal, z. B. dieses Video und hinterlasse einen Kommentar zum Video, in dem du sagst, was ich als nächstes bauen soll. Am 1. September wähle ich zufällig den Kommentar eines Abonnenten aus und versende ihn kostenlos! Danke Jungs, dass ihr so eine einladende Community seid!
Code
- Printed_Stepper_Motor.ino
Printed_Stepper_Motor.inoKlartext
/*010100000111001001101111011101000110111100100000010001113D gedruckter SchrittmotorErstellt 15. August 2015 Geändert 15. August 2015von Anthony Garofalo (Proto G) Besuchen Sie meinen YouTube-Kanal hier:https://www.youtube.com/channel/UCpTuKJrXFwybnpOG7HpTpZwHier meine Instructables Seite besuchen:/www.instructables.com/member/Proto+G/ _____ ______ _____ _______ _____ ______ |_____] |_____/ | | | | | | ____ | | \_ |_____| | |_____| |_____| 01010000011100100110111101110100011011110010000001000111*/int Delay;int reverseSwitch;void setup () {// Initialisiere den digitalen Pin 13 als Ausgang. pinMode(9, AUSGANG); pinMode (10, AUSGANG); pinMode(11, AUSGANG); pinMode(12, AUSGANG); pinMode(13, AUSGANG); // LED-Pin für visuellen PinMode (6, INPUT); // Kippschalter ist mit dem digitalen Pin 6 verbunden, um die Richtung umzukehren}void loop () { reverseSwitch =digitalRead (6); If (reverseSwitch ==HIGH) {//Wenn der Reverse-Schalter hoch ist, drehen Sie den Rotor gegen den Uhrzeigersinn Verzögerung =analogRead (0); Verzögerung =Karte (Verzögerung, 0, 1023, 60, 2000); digitalWrite(12, HOCH); digitalWrite(13, HOCH); Verzögerung (Verzögerung); digitalWrite(12, LOW); digitalWrite(13, LOW); Verzögerung(5); Verzögerung =analogRead(0); Verzögerung =Karte (Verzögerung, 0, 1023, 60, 2000); digitalWrite(11, HIGH); Verzögerung (Verzögerung); digitalWrite(11, LOW); Verzögerung(5); Verzögerung =analogRead(0); Verzögerung =Karte (Verzögerung, 0, 1023, 60, 2000); digitalWrite (10, HOCH); digitalWrite(13, HOCH); Verzögerung (Verzögerung); digitalWrite (10, NIEDRIG); digitalWrite(13, LOW); Verzögerung(5); Verzögerung =analogRead(0); Verzögerung =Karte (Verzögerung, 0, 1023, 60, 2000); digitalWrite(9, HIGH); Verzögerung (Verzögerung); digitalWrite(9, LOW); Verzögerung(5); aufrechtzuerhalten. Sonst {//Wenn der Rückwärtsschalter nicht hoch ist, drehen Sie den Rotor im Uhrzeigersinn Delay =analogRead (0); Verzögerung =Karte (Verzögerung, 0, 1023, 60, 2000); digitalWrite(9, HIGH); digitalWrite(13, HOCH); Verzögerung (Verzögerung); digitalWrite(9, LOW); digitalWrite(13, LOW); Verzögerung(5); Verzögerung =analogRead(0); Verzögerung =Karte (Verzögerung, 0, 1023, 60, 2000); digitalWrite (10, HOCH); Verzögerung (Verzögerung); digitalWrite (10, NIEDRIG); Verzögerung(5); Verzögerung =analogRead(0); Verzögerung =Karte (Verzögerung, 0, 1023, 60, 2000); digitalWrite(11, HIGH); digitalWrite(13, HOCH); Verzögerung (Verzögerung); digitalWrite(11, LOW); digitalWrite(13, LOW); Verzögerung(5); Verzögerung =analogRead(0); Verzögerung =Karte (Verzögerung, 0, 1023, 60, 2000); digitalWrite(12, HOCH); Verzögerung (Verzögerung); digitalWrite(12, LOW); Verzögerung(5); } } Kundenspezifische Teile und Gehäuse
Schaltpläne
Herstellungsprozess