


Roboterarm mit Controller
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
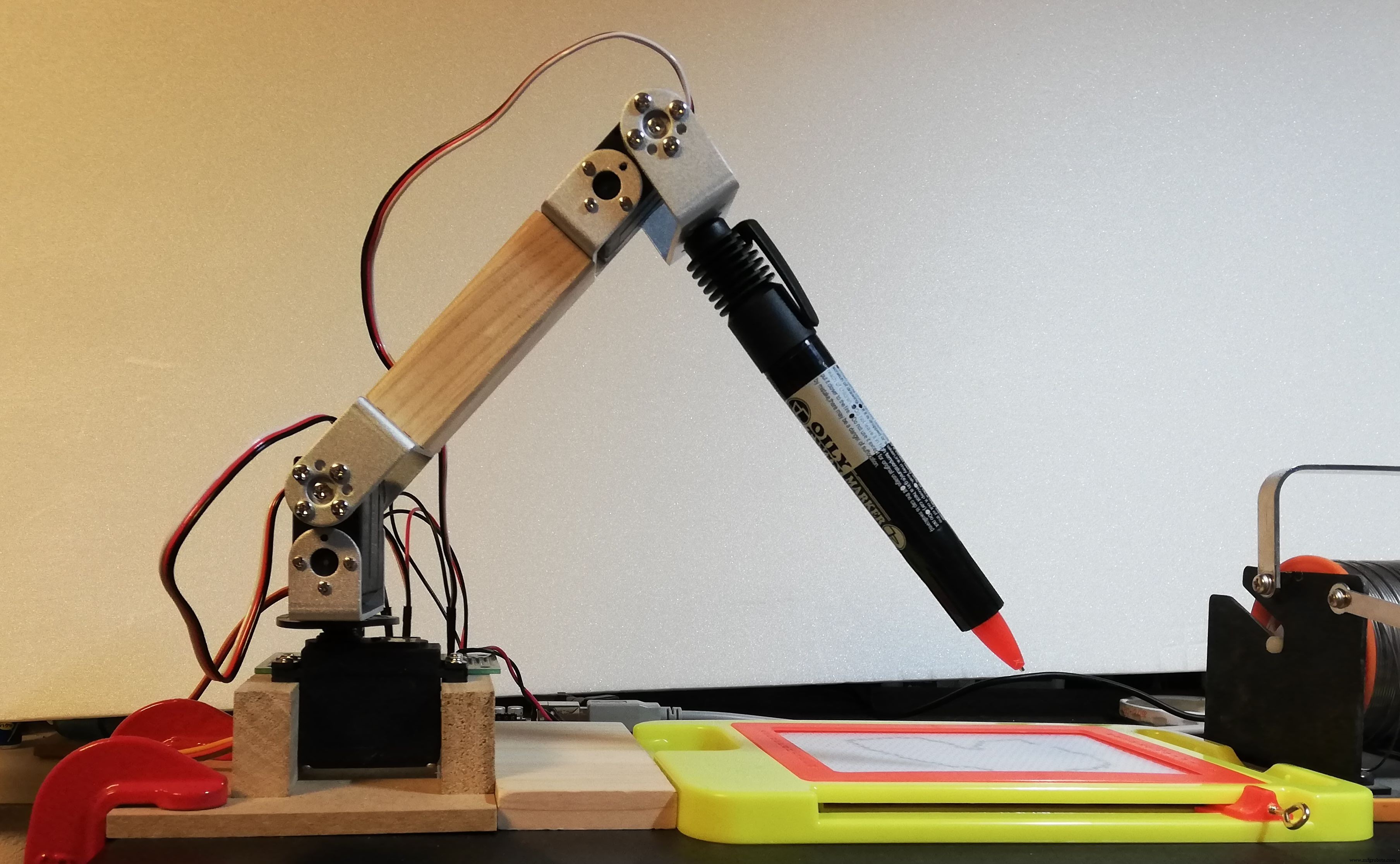
Ich habe einen Obot-Arm und seinen Controller hergestellt.
Verfassung
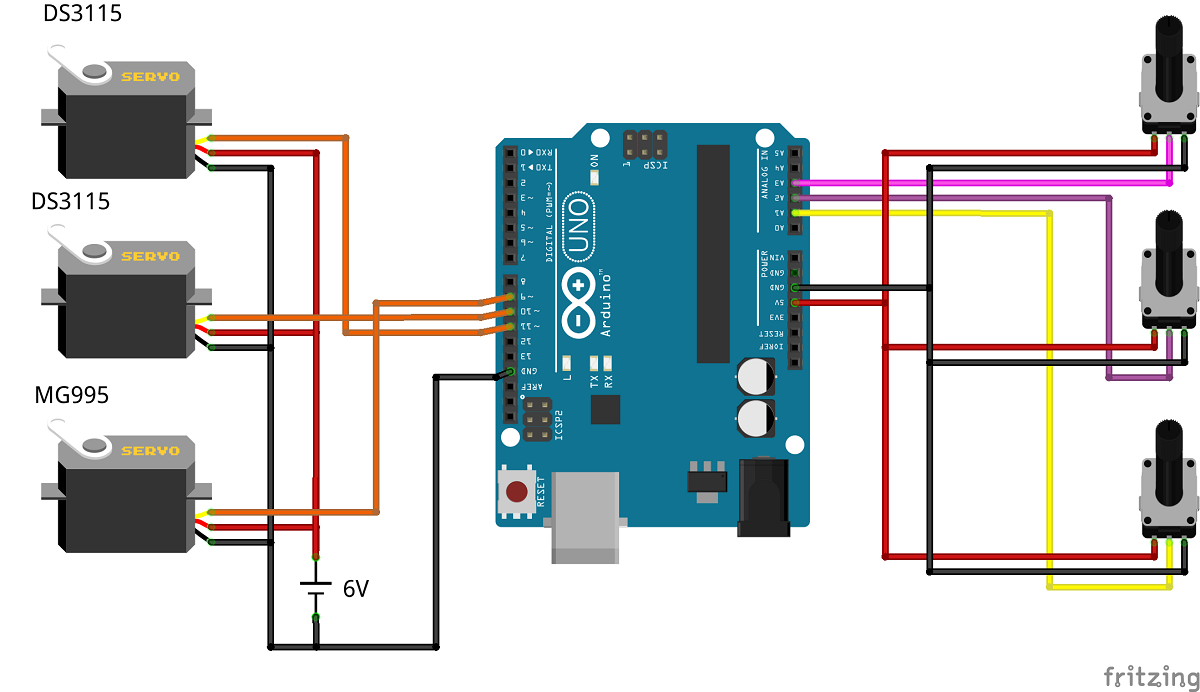
Der Roboterarm verwendet drei konventionelle PWM-Servos, und jeder Winkel wird durch einen variablen Widerstand gesteuert. Das Drehpotentiometer verwendet B-Kurve 10k Ohm.
Produktion von Roboterarmen
In vertikaler Richtung wurden zwei DS3115-Servomotoren und in Schwenkrichtung der MG995-Servomotor verwendet.
Controller-Produktion
Ich habe ein Controller-Gehäuse mit einem 3D-Drucker hergestellt.
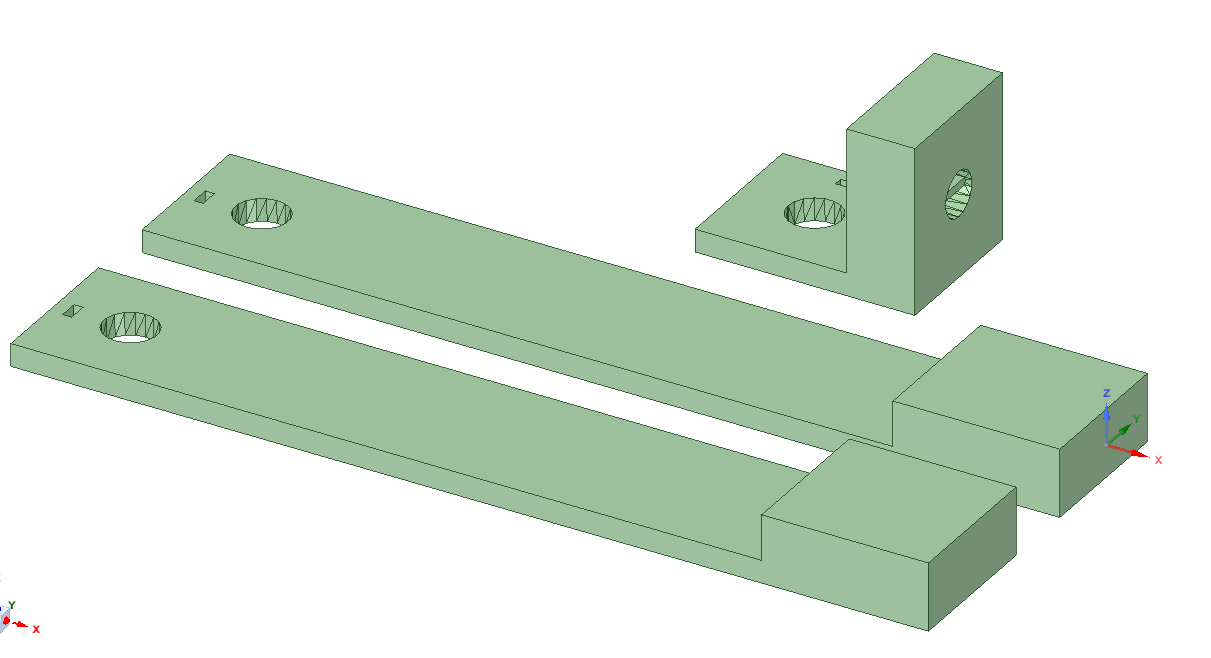
Ein Loch und ein Positionierungsloch zum Durchschrauben des Knopfes des Drehpotentiometers und eine Vertiefung zum Einsetzen des Knopfes sind vorhanden.

Montieren Sie die gefertigten Teile und drei Drehpotentiometer, um den Vorgang abzuschließen!
Das Drehpotentiometer ist jetzt in die gleiche Richtung wie die Drehachse des Servomotors des Roboterarms platziert!
Arduino-Code
Dieser einfache Code liest einfach den Wert des Drehpotentiometers mit einem analogen Pin, wandelt ihn in einen Winkel um und gibt ihn in das entsprechende Servo ein.
#include
Servo myservo1, myservo2, myservo3;
float th1=90.0,th2=90.0,th3=90.0;
float val1, val2, val3;
void setup() {
Serial.begin(9600);
myservo1.attach(9, 500, 2420); //MG995
myservo2.attach(10, 820, 2140); //DS3115
myservo3.attach(11, 820, 2140); //DS3115
set_servo();
}
void loop() {
val1 =analogRead(A1);
val2 =analogRead(A2);
val3 =analogRead(A3);
th1 =map(val1, 170.0, 880.0, 0.0, 180.0);
if(th1>=180.0){
th1 =180.0;
}else if(th1 <=0.0){
th1 =0.0;
}
th2 =map(val2, 150.0, 860.0, 0.0, 180.0);
if(th2>=180.0){
th2 =180.0;
}else if(th2 <=0.0){
th2 =0.0;
}
th3 =map(val3, 860.0, 160.0, 0.0, 180.0);
if(th3>=180.0){
th3 =180.0;
} else if(th3 <=45,0){
th3 =45,0;
}
set_servo();
}
void set_servo( ){
myservo1.write(th1);
myservo2.write(th2);
myservo3.write(th3);
}
Betrieb
Schließen Sie das Drehpotentiometer ab und verbinden Sie es mit Arduino!
Kundenspezifische Teile und Gehäuse
Herstellungsprozess
- Ein mobiler Roboter mit visueller Hindernisvermeidung
- Webgesteuerter Raspberry Pi-Roboter mit Video
- Einfacher Pi-Roboter
- Zweiarmiger SCARA-Roboter
- Desinfektionsroboter mit UV-Licht
- Unopad - Arduino MIDI-Controller mit Ableton
- MeArm-Roboterarm – Ihr Roboter – V1.0
- Drehzentrum mit Roboterarm ausgestattet
- Robot kombiniert einen kollaborativen Roboterarm mit einer mobilen Plattform
- Servobewegung verbessert den Roboterbetrieb