


Typen von Industrierobotern und ihre unterschiedlichen Anwendungen
Entdecken Sie die vielen Arten von Industrierobotern und ihre einzigartigen Fähigkeiten. Machen Sie sich heute ein klares Bild von den Anwendungen und Anwendungen jedes Robotertyps:Roboterarme, mobile Roboter, Luftdrohnen, Unterwasserroboter und Cobots.
Wie entscheiden Sie, welcher Industrierobotertyp der richtige ist?
Es gibt so viele verschiedene Robotertypen auf dem Markt – woher wissen Sie, welchen Typ Sie verwenden sollen? Wie bei vielen Design- und Engineering-Themen gilt auch hier „Form follows Function“. Das heißt, welcher Robotertyp benötigt wird, hängt von seiner beabsichtigten Funktion ab. Wird der Roboter am Boden oder einer anderen Oberfläche befestigt oder muss er mobil sein? Wie viele Einheiten muss der Roboter pro Stunde verarbeiten können? Welches maximale Gewicht darf der Roboter heben? Wie groß ist der Arbeitsbereich, wenn der Roboter an einer Stelle befestigt ist? Ist der Arbeitsraum rechteckig oder kreisförmig? Die Beantwortung dieser Fragen wird Ihre Auswahl schnell eingrenzen und Ihnen die Auswahl des idealen Industrierobotertyps für Ihre Zwecke ermöglichen.
In diesem Artikel untersuchen wir verschiedene Arten von Robotern, ihre Stärken und Schwächen und wie man ihren Einsatzzweck bestimmt.
Inhalt dieses Artikels
- Stationäre Roboter (Roboterarme)
- Autonome mobile Roboter
- Flugroboter (Luftdrohnen)
- Unterwasserroboter
- So finden Sie den idealen Robotertyp für Ihr Unternehmen
Stationäre Roboter (Roboterarme)
Es gibt sieben Haupttypen von stationären Robotern auf dem Markt. Unter stationär verstehen wir Roboter, die am Boden, an der Decke oder an einer anderen Oberfläche verschraubt sind – sie sind nicht mobil. Im Allgemeinen sind stationäre Roboter Roboterarme, die für Aufgaben wie Kommissionieren und Platzieren, Sortieren, Montieren, Schweißen und Fertigstellen ausgelegt sind.
Hier betrachten wir die verschiedenen Arten von Roboterarmen und ihre Eigenschaften und Verwendungen.
- Gelenkte Roboterarme
- Kartesische oder rechteckige Roboter
- SCARA-Roboter
- Polar- oder Kugelroboter
- Delta- oder Parallelroboter
- Portalroboter
- Zylinder
- Kollaborative Roboter/Cobots
Gelenkte Roboterarme
Vorteile: Flexibelste Bewegung aller Roboterarmtypen. Kann sehr stark sein und schwere Gegenstände heben.
Nachteile: Muss wohl abgezäunt werden. Langsamer als einige der anderen Roboterarme. Teurer als andere Roboterarme. Benötigt ausgefeiltere Kontrollsysteme.
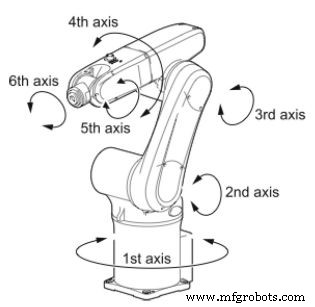
Im Vergleich zu anderen Arten von Roboterarmen ähnelt die Bewegung eines Roboterarms am ehesten einem menschlichen Arm. Ein typischer Gelenkarm hat sechs Achsen oder Gelenke. Je nach Anwendung und Hersteller können es weniger oder mehr sein. Je mehr Gelenke ein Roboter hat, desto sanfter und weniger „roboterähnlich“ wird seine Bewegung. Diese Bewegungsflexibilität wird durch Freiheitsgrade beschrieben
Interessante Tatsache: Konstrukteure von künstlichen Händen halten die menschliche Hand für 27 Freiheitsgrade. Ein menschlicher Arm hat 7 Freiheitsgrade, also insgesamt 34 Freiheitsgrade zwischen dem menschlichen Arm und der Hand.
Für einen Industrieroboter wäre es zu teuer und zu komplex, all die subtilen Bewegungsarten des menschlichen Arms und der Hand nachzubilden. Es besteht allgemein Einigkeit darüber, dass 6 Freiheitsgrade in einem Industrieroboterarm ausreichen, um nahezu jede benötigte Aufgabe zu erfüllen.
Der Roboter kann nicht Klavier spielen, muss es aber auch nicht!
Je nach Anwendung kann ein Roboterarm mit einem Greifer ausgestattet sein, dem robotischen Äquivalent einer Hand. Normalerweise sind Robotergreifer viel einfacher als die menschliche Hand. Manchmal können sie so einfach wie ein Saugnapf oder ein Elektromagnet sein. Oder vielleicht kann ein weicher Dreifingergreifer verwendet werden, um empfindliche Gegenstände wie frische Produkte oder ein Ei aufzunehmen. Es gibt viele verschiedene Arten von Greifern, und es wurde noch kein einziger Robotergreifer gefunden, der alle Anwendungen bewältigen kann.
Alternativ kann das sogenannte End of Arm Tooling (EoAT) eine Art Werkzeug sein, vielleicht ein rotierendes Werkzeug, das einen Bohrer oder eine andere Art von Bit zum Entgraten, Schleifen oder Fräsen hält. Es gibt viele Möglichkeiten, einschließlich spezialisierter EoAT zum Schweißen, Lackieren, Schleifen, Laserschneiden und vielem mehr.
Knickgelenkte Roboter sind hochflexibel, da sich alle ihre Gelenke drehen können, im Gegensatz zu Linear- oder Translationsgelenken, die sich nur geradlinig bewegen können.
Knickgelenkte Roboter werden in Anwendungen wie Pick-and-Place, Lichtbogenschweißen, Punktschweißen, Verpackung, Maschinenbedienung und Materialhandhabung eingesetzt. Die Fähigkeit, Bögen (oder ähnliche Muster) an schwer zugänglichen Stellen zu erzeugen, macht Knickarmroboter zu einem guten Kandidaten für die Automobilindustrie und andere Fertigungsbereiche, die diese Fähigkeit erfordern.
In der Vergangenheit waren große und leistungsstarke Knickarmroboter, die tonnenschwere oder mehr schwere Gegenstände aufnehmen konnten, nicht mit Sensoren ausgestattet, die es ihnen ermöglichten, ihre Umgebung wahrzunehmen. Wenn eine Person einem solchen Roboter im Weg steht, kann sie schwer verletzt oder sogar getötet werden.
Daher müssen solche Roboterarme in einen eigenen Raum aufgeteilt werden. Nur qualifiziertes Personal, das die Funktionsweise des Roboters vollständig versteht, darf den ummauerten oder umzäunten Raum betreten, in dem diese Roboter arbeiten.
Wenn ein Knickarmroboter jedoch mit entsprechenden Sensoren und Steuerungssoftware ausgestattet ist, kann er sicher um Menschen herum operieren. Zum Beispiel mithilfe von Computer Vision mit einer Kamera oder vielleicht einem LiDAR-Sensor, wenn ein solcher Roboter erkennt, dass etwas seiner Bewegungsbahn im Weg steht, oder sogar, dass sich eine Person oder ein Objekt nähert und noch nicht im Weg ist, der Roboter verlangsamen oder stoppen können. Andere Sensoren können eine Kollision erkennen – wenn der Arm gegen etwas stößt, stoppt er und/oder kehrt den Kurs um. Normalerweise sind Gelenkarme, die sicher an der Seite von Personen betrieben werden können, in ihrer Geschwindigkeit und Kraft begrenzt.
Kartesische oder rechteckige Roboter
Vorteile: Einfaches Kontrollsystem. Kann je nach Modell sehr schwere Gegenstände heben. Genau. Starr in allen drei Achsen. Günstiger als Gelenkarme.
Nachteile: Kann keine Drehbewegungen ausführen.
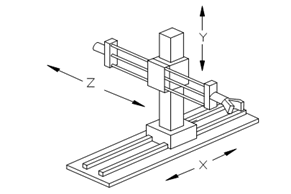
Diese Roboter verwenden das kartesische Koordinatensystem (X, Y und Z) für lineare Bewegungen entlang der drei Achsen (vorwärts und rückwärts, auf und ab und seitlich). Alle drei Gelenke sind translatorisch, was bedeutet, dass die Bewegung des Gelenks auf eine gerade Linie beschränkt ist. Aus diesem Grund werden solche Roboter auch als „lineare“ Roboter bezeichnet.
Kartesische Roboter können für Pick-and-Place, Materialhandling, Verpackungsautomatisierung, Ein- und Auslagerung, Schneiden und Bohren und viele weitere Anwendungen eingesetzt werden.
Sie sind in allen drei Dimensionen starr, was sie sehr genau und wiederholbar macht. Sie sind einfacher als gelenkige Roboterarme, mit einfacherer Softwaresteuerung und können je nach Anwendung kostengünstiger sein.
Gantry-Roboter - Eine Art kartesischer Roboter
Vorteile: Kann je nach Modell sehr schwere Gegenstände heben. Kann sehr groß ausgeführt werden, auf Wunsch über die gesamte Länge der Anlage. Kann für die richtigen Anwendungen sehr kostengünstig sein.
Nachteile: Kann keine Drehbewegung ausführen.

Als Portalroboter können kartesische oder lineare Roboter konfiguriert werden. Portalroboter bewegen sich entlang einer Hängebahn. Portalroboter können je nach Ausführung sehr schwere Lasten handhaben und diese schnell und präzise bewegen. Sie können bei Bedarf auch sehr groß ausgeführt werden und die gesamte Grundfläche einer Anlage abdecken. Kleinere Portalroboter können für Pick-and-Place- und andere Operationen mit hoher Genauigkeit und guter Steifigkeit nützlich sein.
Da der Bewegungssteuerungsaspekt des Linearroboters relativ einfach ist, ist er oft kostengünstiger als andere Robotertypen und kann eine sehr kostengünstige Lösung für viele Automatisierungsaufgaben sein.
Der Arbeitsraum eines kartesischen Roboters ist rechteckig. Das Hinzufügen der vertikalen Bewegung bedeutet, dass der Arbeitsraum die Form einer Box hat.
SCARA-Roboter
Vorteile: Hervorragend geeignet für viele Montageanwendungen. Schnell und genau. Kostengünstig für Montagearbeiten.
Nachteile: Nicht so flexibel wie Gelenkarme. Nicht so genau wie kartesische Waffen. Nicht so schnell wie Delta-Roboterarme.
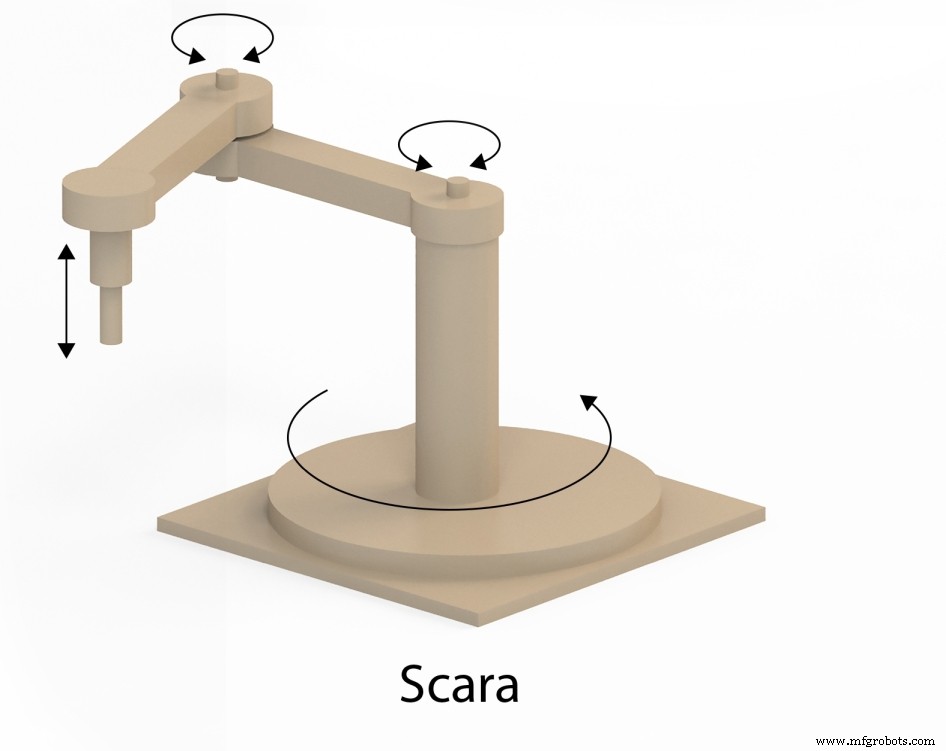
SCARA-Roboter (Selective Compliance Assembly Robot Arm) ähneln kartesischen Robotern darin, dass sie sich in 3 Gelenken oder Achsen bewegen. Im Gegensatz zu kartesischen Robotern sind jedoch zwei der Gelenke von SCARA-Robotern rotatorisch. Sie sind daher zu komplexeren Bewegungen fähig als die kartesischen Roboter. Sie sind im Allgemeinen schneller und haben mehr Bewegungsflexibilität, sind aber weniger präzise als kartesische Roboter.
Interessante Tatsache: Der weit verbreitete Einsatz von SCARA-Robotern hat die kleine Elektronikindustrie revolutioniert. Aufgrund ihres geringen Platzbedarfs, ihrer Einfachheit und ihrer Konstruktionsmerkmale sind sie für diesen Anwendungsbereich einzigartig gut geeignet und haben sich als äußerst kostengünstig erwiesen.
Wie die „Montage“ im Namen schon sagt, wurde der SCARA-Roboterarm für Montageanwendungen erfunden. Der SCARA-Roboter wurde 1981 von Hiroshi Makino an der Yamanashi University in Japan entwickelt. Das „Compliance“ im Namen bezieht sich auf ein gewisses Maß an „Geben“. Das heißt, wenn Sie einen SCARA-Roboter in der horizontalen Ebene schieben, gibt er ein wenig nach - er bewegt sich, er ist nicht völlig starr. In der vertikalen Ebene ist ein SCARA-Roboter jedoch ziemlich steif, und er wird nicht „nachgeben“, wenn Sie ihn in diese Richtung schieben. Daher hat es eine „selektive“ Compliance. Es ist in der horizontalen Ebene nachgiebig und nicht in der vertikalen Ebene.
Die selektive Nachgiebigkeit ist sehr nützlich bei Montagevorgängen, bei denen ein Teil beispielsweise in eine Leiterplatte eingefügt werden muss. Diese Art der Montage erfordert oft, dass ein Teil in ein Loch eingepasst wird. Das Zentrieren des Teils in das Loch erfordert oft ein wenig "Nachgiebigkeit", um den Mittelpunkt zu finden - ein bisschen herumwackeln oder ein bisschen "nachgeben". Dann muss die Einführkraft, die sich nach unten bewegt, fest und starr sein.
SCARA-Roboter sind weniger steif als kartesische Roboter und auch auf das Gewicht beschränkt, das sie heben können, im Vergleich zum kartesischen Roboter, der ziemlich schwere Gegenstände heben kann. SCARA-Roboter haben einen geringen Platzbedarf und werden in der Regel für Anwendungen eingesetzt, bei denen die zu bewegenden Distanzen relativ gering sind. Sie haben weniger Freiheitsgrade als die Gelenkarme. Andererseits haben sie ein hohes Maß an Genauigkeit und sind recht wiederholbar. Und sie sind weniger teuer als ein Gelenkarm.
Der Arbeitsraum eines SCARA-Roboters ist zylindrisch, was auch bei der Anwendung berücksichtigt wird. SCARA-Roboter sind im Allgemeinen schneller als Knickarme, wenn auch nicht so schnell wie Delta-Roboter.
Polar- oder Kugelroboter
Vorteile: Einfacheres Steuerungssystem als Gelenkarm. Kann eine lange Reichweite haben. Sehr gut für viele Schweißanwendungen. Kann schneller sein als der Gelenkarm.
Nachteile: Nicht so flexibel wie Roboterarme. Ältere Technik. Benötigt oft einen ziemlich großen Platzbedarf. Nicht so schnell wie Deltaarme.
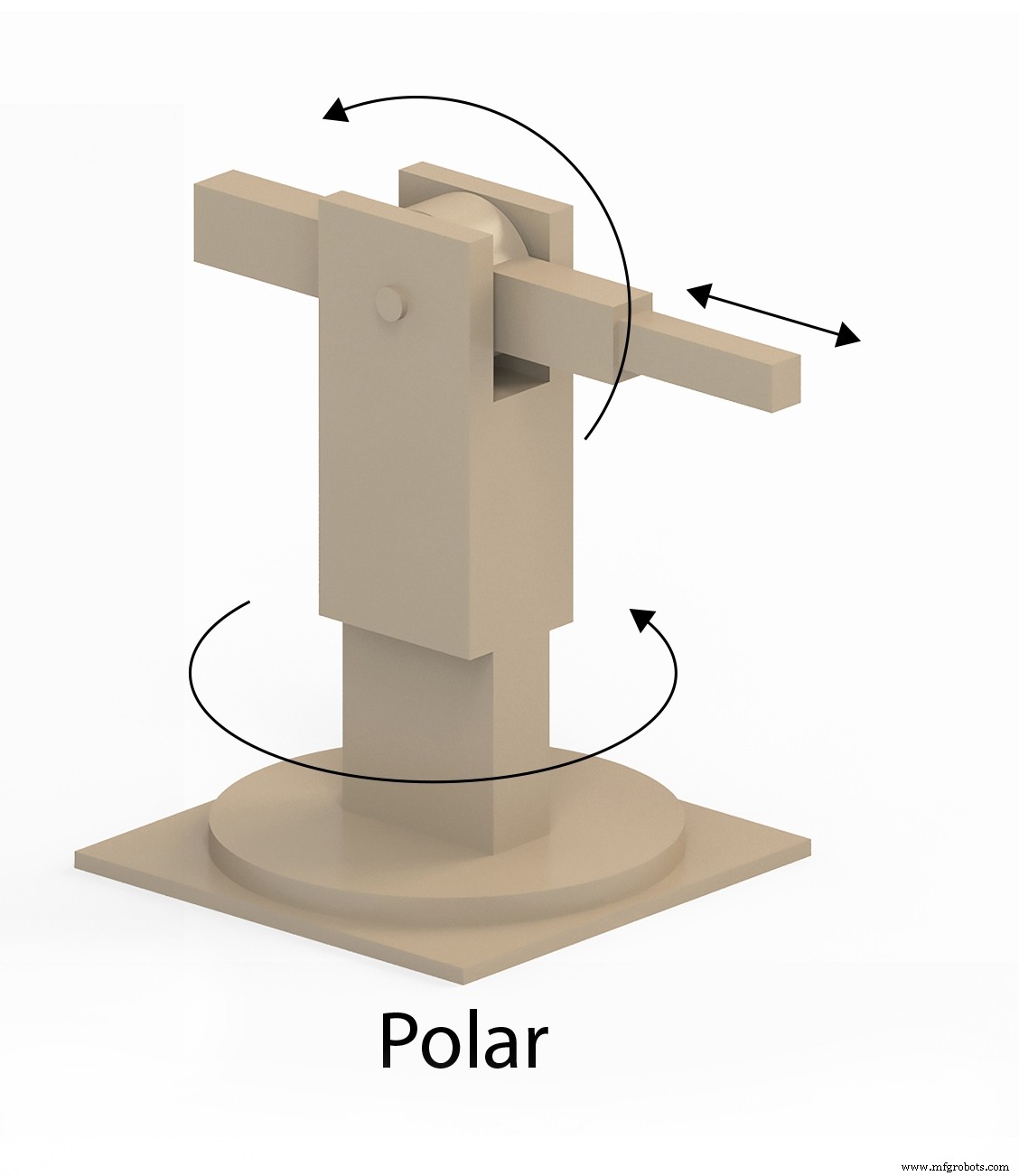
Polarroboter (manchmal auch als sphärische Roboter bezeichnet) verfügen über eine Kombination aus zwei Drehgelenken und einem Lineargelenk. Ihr Design schafft einen kugelförmigen Arbeitsraum.
Interessante Tatsache: Der erste Industrieroboter (erstellt in den 1950er Jahren), genannt „Unimate“, war ein kugelförmiger Roboter.
Polar-Roboter können zum Spritzgießen, Lackieren, Lichtbogenschweißen und Punktschweißen verwendet werden. Sie können eine große Reichweite haben, wenn sie mit einem entsprechend großen Lineararm ausgestattet sind.
Polar-Roboter sind eine ältere Technologie und können durch Knickarmroboter (die ebenfalls einen kugelförmigen Arbeitsbereich haben) ersetzt werden, obwohl der Polar-Roboter in einigen Anwendungen immer noch kostengünstiger sein kann als seine Alternativen.
Delta-Roboter
Vorteile: Schnellstes Design von Roboterarmen für Pick-and-Place-Operationen. Leicht. Genau.
Nachteile: Beschränkt auf relativ kleine und leichte Objekte. Nicht geeignet für Arbeiten an Objekten in einer vertikalen Ebene. Begrenzte Reichweite.
Delta-Roboter (auch Parallelroboter genannt) haben drei Roboterarme in Form von Parallelogrammen. Üblicherweise befindet sich der Delta-Roboter über den Werkstücken, befestigt an einem Überkopfbock. Da sich alle Motoren auf der Basis befinden, sind die Gelenke und Arme des Roboters im Vergleich zu anderen Robotern sehr leicht. Der Delta-Roboter hat einen umgedrehten kuppelförmigen Arbeitsraum.
Interessante Tatsache: Der Delta-Roboter wurde ursprünglich entwickelt, um es einem Schokoladenhersteller zu ermöglichen, Schokoladenstücke aufzunehmen und in eine Schachtel zu legen.

Das Design des Delta-Roboters führt zu einem schnellen und präzisen Betrieb. Delta-Roboter werden hauptsächlich in Pick-and-Place-Anwendungen eingesetzt. Weitere Anwendungen sind Klebstoffauftrag, Löten und Montage. Delta-Roboter können keine schweren Nutzlasten tragen, was die Arten von End-of-Arm-Tooling (EoAT) und die Aufgaben, die sie bewältigen können, einschränkt.
Hybridkonstruktionen von Delta-Robotern platzieren manchmal Drehgelenke am Ende der Arme, um die Bewegungsflexibilität zu erhöhen.
Zylinderroboter
Vorteile: Starr. Genau. Perfekt für Anwendungen, die eine kreisförmige Geometrie erfordern.
Nachteile: Ältere Technik. Eingeschränkte Bewegungsfreiheit.
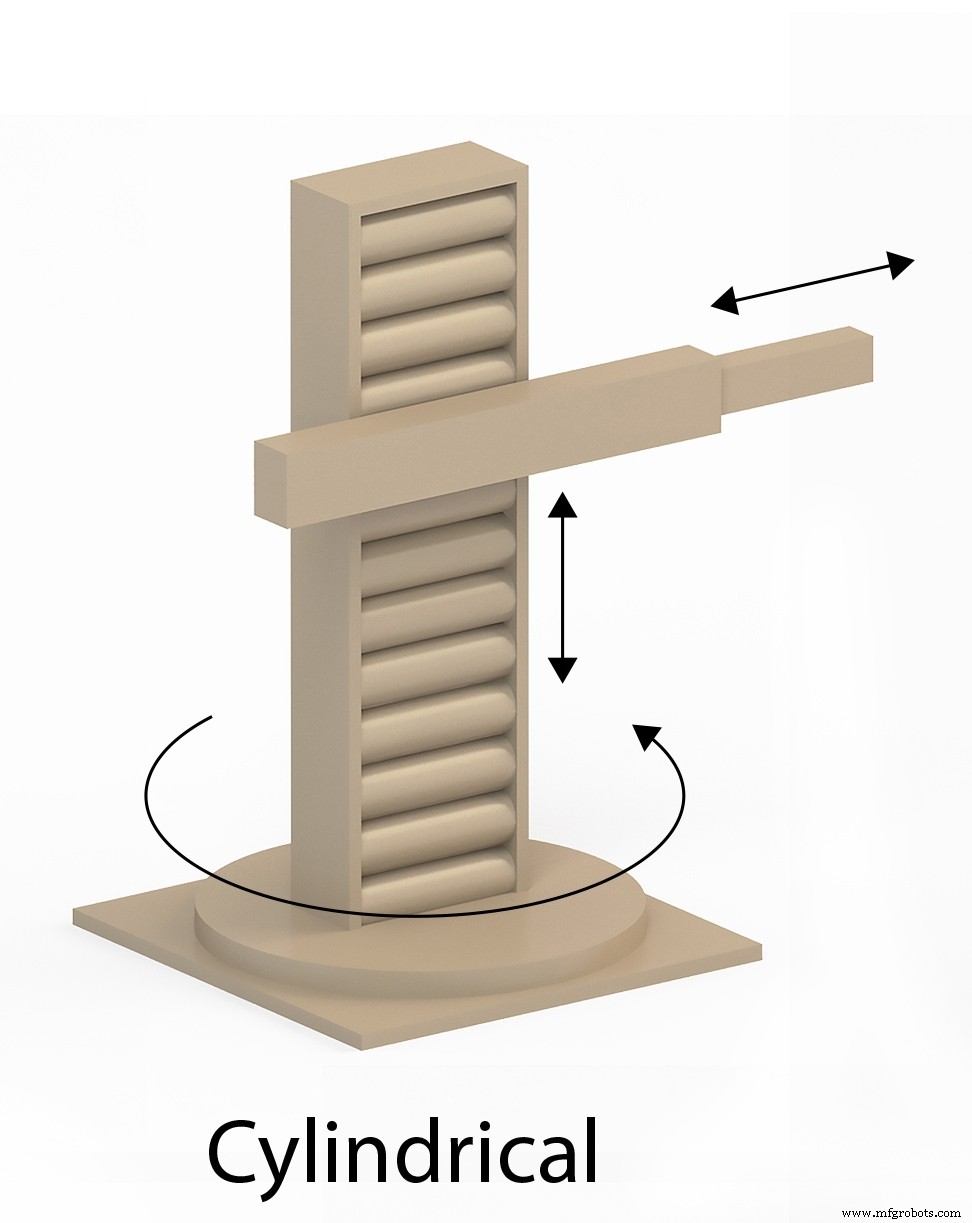
Zylindrische Roboter haben mindestens ein Drehgelenk an der Basis und zwei Lineargelenke. Dieses Design führt zu einem zylindrisch geformten Arbeitsraum.
Zylindrische Roboter werden normalerweise in engen Arbeitsbereichen verwendet und eignen sich perfekt für Objekte, die eine Kreissymmetrie aufweisen müssen (z. B. Drähte, Rohre). Schleif-, Montage- und Punktschweißanwendungen verwenden zylindrische Roboter.
Kollaborative Roboter (Cobots)
Vorteile: Sicheres Arbeiten mit Menschen. Moderne Schnittstellen ermöglichen es, dem Roboterarm beizubringen, was er tun soll, ohne Code schreiben zu müssen.
Nachteile: Nicht immer der schnellste Roboterarm. Begrenzt in Kraft und Geschwindigkeit.
Kollaborative Roboter (Cobots) ermöglichen die Mensch-Roboter-Interaktion in einer sicheren Arbeitsumgebung, ohne dass Zäune oder andere Sicherheitsmaßnahmen bei herkömmlichen Industrieroboteranwendungen erforderlich sind. Sicherheitsmaßnahmen führen jedoch zu einer Verringerung der Betriebsgeschwindigkeit.

Abgesehen davon, dass sie sicher neben Menschen arbeiten können, ist eine der Eigenschaften, die Cobots kollaborativer machen, die Fähigkeit eines Bedieners, dem Roboterarm die Bewegungen beizubringen, die er ausführen muss, ohne Programmiercode schreiben zu müssen. Der Bediener greift den Roboterarm und bewegt ihn physisch in die Richtung, in die der Roboter gehen muss. Der Roboterarm kann dann die demonstrierte Bewegung replizieren.
Ein Standard-Cobot ist normalerweise nicht dafür ausgelegt, sehr schwere Gegenstände zu handhaben. Dies führt zu einer Einschränkung der Produktpalette, die es verwalten kann.
Kollaborative Roboter haben ein breites Anwendungsspektrum wie Maschinenbedienung, Pick-and-Place, Montage, Lichtbogenschweißen, sind jedoch im Allgemeinen nicht für Hochleistungsanwendungen oder sehr schnelle Aufgaben geeignet.
Autonome mobile Roboter

AMRs oder Autonomous Mobile Robots repräsentieren ein schnell wachsendes Segment des Industrierobotermarktes. Sie sind in vielen Formen und Größen erhältlich, optimiert für die Aufgaben, für die sie entwickelt wurden.
Wagen mit Rädern
AMRs in Form von Karren oder Fahrzeugen mit Rädern werden typischerweise zum Transportieren von Waren innerhalb einer Fabrik oder Lagereinrichtung verwendet. Sie sind mit Sensoren, Onboard-Rechenleistung und Elektromotoren ausgestattet, die es ihnen ermöglichen, sich in einer Anlage zu bewegen und eine interne Karte davon zu erstellen. Dies geschieht oft mit einer Person, die dem AMR folgt und es per Fernbedienung führt.
Nachdem eine interne Karte erstellt wurde, kann der AMR dann angewiesen werden, zu welchen Zielen er reisen muss. Ein wesentliches Merkmal von AMRs ist, dass sie sich selbstständig („autonom“) von einem Ort zum anderen bewegen können und dabei Hindernissen auf dem Weg ausweichen. Wenn eine Person, ein Gabelstapler oder ein anderer Gegenstand ihnen den Weg versperrt, können sie ausweichen, um das Hindernis zu umgehen oder sogar eine völlig neue Route zu ihrem Ziel planen.
Die autonomen Fähigkeiten von AMRs machen sie im Vergleich zu einem Fördersystem sehr flexibel.
AMRs in Form von Rollwagen können einzeln zum Transport von Gütern verwendet werden, aber auch als Teil eines Schwarms oder einer Roboterflotte. Flotten von AMRs werden beispielsweise von Amazon verwendet. Amazon verwendet eine sogenannte „Ware zur Person“-Konfiguration, bei der jeder Roboter ein ganzes Regal mit Produkten aufnimmt und zu einer Person an einem Kommissionierplatz bringt. Die Person entnimmt dann das/die Produkt(e) aus dem Regal und legt es in einen Behälter für die E-Commerce-Bestellabwicklung.
Fortschritte in Computer Vision, künstlicher Intelligenz und Greifertechnologie haben es in letzter Zeit ermöglicht, die Person an der Kommissionierstation durch einen gelenkigen Roboterarm zu ersetzen. In diesem Fall bringt der Rollwagen AMR die Waren zum Roboterarm für eine Roboter-zu-Roboter-Kollaboration.
Autonomous Guided Vehicles (AGV)
AGVs haben normalerweise die Form eines Fahrzeugs mit Rädern und sind eine ältere Technologie als AMRs. Sie verfügen über weniger Onboard-Intelligenz und sind daher nicht so autonom wie AMRs. AGVs sind nicht in der Lage, eine Karte einer Anlage zu erstellen. Stattdessen verlassen sie sich auf Wege, die ihnen vorgegeben wurden. Die Pfade werden durch in den Boden gelegte Drähte, spezielles Klebeband oder andere Arten von Führungen definiert. Stößt ein AGV auf Hindernisse auf seinem Weg, kann es nur anhalten und um Hilfe rufen.
Allerdings verschwimmen die Unterschiede zwischen AGVs und AMRs zunehmend. AGVs erhalten mehr Rechenleistung an Bord, und einige haben jetzt die Möglichkeit, Hindernisse auf ihrem Weg zu umgehen.
AMRs mit Roboterarmen
Ein Roboterarm kann auf einem AMR mit Rädern montiert werden. Dies erhöht die Flexibilität des Roboters und die Vielfalt seiner Aufgaben. Eine Anwendung besteht darin, einen solchen Roboter zum Bedienen einer ganzen Reihe von Werkzeugmaschinen einzusetzen. Der Roboter kann ein fertiges Teil entladen und ein neues Rohteil in eine Maschine laden und dann die Reihe nach unten bewegen und die Vorgänge für eine Reihe von Maschinen wiederholen.
Roboter mit Beinen
Millionen von Menschen haben das YouTube-Video tanzender Roboter von Boston Dynamics gesehen und haben daher zwei- und vierbeinige Roboter gesehen. Eine industrielle Anwendung für Roboter mit Beinen sieht vor, sie für die Paketzustellung einzusetzen. Ein weiterer Anwendungsfall sind Such- und Rettungseinsätze.
Die Verwendung von Beinen anstelle von Rädern hat bestimmte Vorteile. Die Beine ermöglichen es dem Roboter, über Gelände zu fahren, das für Karren mit Rädern schwierig oder unmöglich wäre. Beine ermöglichen das Treppensteigen und das Ein- und Aussteigen in ein Fahrzeug einfacher als ein Wagen mit Rädern.
Kugelförmige AMRs
Autonome mobile Roboter in Form einer Kugel sind im Handel erhältlich und haben besondere Vorteile gegenüber anderen Formfaktoren. Die Systemkomponenten des kugelförmigen AMR sind in einer haltbaren Hülle versiegelt. Dadurch sind sie in der Lage, in rauen Umgebungen zu arbeiten. Sie können auch schwimmen und über Wasser reisen. Sphärische AMRs können amphibisch sein und sowohl auf dem Wasser als auch an Land reisen.
Das Antriebssystem eines kugelförmigen AMR basiert meistens auf einer Verlagerung des Schwerpunkts.
Die industriellen Anwendungen für kugelförmige AMRs liegen hauptsächlich in der Überwachung und Ferninspektion. Ausgestattet mit Kameras und Kommunikation können sie Videos an die Fernbediener zurücksenden. Für feindliche Umgebungen, in denen giftige Gase oder andere gefährliche Bedingungen auftreten können, kann ein kugelförmiger AMR ideal sein.
Flugroboter (Luftdrohnen)
Unbemannte Luftfahrzeuge (UAVs) oder Drohnen werden zunehmend für verschiedene industrielle Zwecke eingesetzt. Eine Anwendung ist der Einsatz von Drohnen in Lagerhallen zur Bestandsaufnahme. Die Drohne kann durch die Gänge des Lagers fliegen und per Computer Vision die Anzahl der Artikel in Kisten in den Regalen zählen.

Je nach Bauart kann eine Industriedrohne eine Art Autonomous Mobile Robot (AMR) sein, da einige Modelle Hindernisse automatisch erkennen, ihnen ausweichen und selbstständig ihren Weg zu ihrem Ziel navigieren können. Einige Industriedrohnen können eine „Mission“ erhalten, die darin bestehen kann, einen Tagebaubetrieb oder ein Infrastrukturprojekt zu überfliegen. Die Drohne fliegt ihre Mission autonom und kann Videos des Projekts aufnehmen oder bestimmte Messungen vornehmen und aufzeichnen. Solche Drohnen können verwendet werden, um den Fortschritt von Bauprojekten zu überwachen.
Amazon und andere Unternehmen setzen Drohnen bereits eingeschränkt für die Lieferung von langlebigen Gütern und Lebensmitteln ein.
Unterwasserroboter

Es gibt eine Vielzahl von Robotern, die für den Einsatz unter Wasser entwickelt wurden. Einige Unterwasserroboter sind so konzipiert, dass sie autonom sind (Autonomous Underwater Vehicles - UAVs), und andere werden entweder drahtlos oder mit einem kabelgebundenen Seil ferngesteuert. Einige Unterwasserroboter verwenden Propeller als Antriebssystem, ähnlich wie bei U-Booten. Andererseits imitieren viele dieser Roboter die Aktion von Lebewesen für ihren Antrieb. Einige ahmen die Aktion von Delfinen nach, andere imitieren Schlangen und wieder andere bewegen sich wie Fische. Die Nachahmung der Natur auf diese Weise wird „Biomimikry“ genannt, weil die Aktion des Roboters biologische Lebewesen nachahmt.
Unterwasserroboter können zur Inspektion von Offshore-Ölplattformen, Pipelines und für die wissenschaftliche Forschung eingesetzt werden. Andere Anwendungen umfassen den Einsatz von Unterwasserrobotern, um den Boden von Brücken zu inspizieren, die Einlässe von Wasserkraftwerken zu inspizieren und Korallenriffe zu inspizieren.
Unterwasserroboter werden von Polizeibehörden eingesetzt, um auf der Suche nach Beweisen Videoaufnahmen vom Grund von Gewässern zu machen. Auch das Militär interessiert sich für Unterwasserroboter. Könnte ein Sonarsystem den Unterschied zwischen einem Roboter-"Delphin" und einem echten erkennen?
Die Vorteile von Unterwasserrobotern sind vielfältig. Mit solchen Robotern ist es nicht notwendig, das Risiko und die Kosten menschlicher Taucher auf sich zu nehmen. Roboter können länger unter Wasser bleiben als Menschen. Equipping underwater robots with sensors enables them to measure and record an almost infinite number and types of properties
How to source the ideal robot type for your organization
HowToRobot is a global platform helping companies to succeed with automation. By using the HowToRobot worldwide directory of over 15,000 robotics companies, you can find the type of robot you need, ideally suited for your application.
If you already know what type of robot you need, and want to get more information from robotics vendors, you can get quotes and receive product information and pricing from multiple vendors through HowToRobot.
If you are not sure what kind of robotic component or part you need and would like to simply describe your application and some of your Key Performance Indicators (KPIs) and goals you’d like to achieve through automation, you can submit a Request for Information and receive responses from vendors who can supply you information about their solutions.
Bitte beachten Sie, dass es unparteiische HowToRobot-Experten gibt, die Ihnen bei der Navigation durch den Prozess helfen können. Klicken Sie hier, um ein Beratungsgespräch mit einem Fachberater zu vereinbaren.
Industrieroboter
- Verschiedene Arten von Industrieleitern und ihre Anwendungen
- Arten von Laufkranen und ihre Verwendung
- Verschiedene Aluminiumbronze-Sorten und ihre Verwendung
- 5 wichtige industrielle Metalllegierungen und ihre Verwendung
- Verschiedene Arten von Schlägen und ihre Verwendung
- Was sind die verschiedenen Arten von Schlägen und ihre Verwendung
- Verstehen verschiedener Arten von Stanzwerkzeugen und ihrer primären Verwendung
- Verschiedene Arten von Nichteisenmetallen und ihre Verwendung
- Verschiedene Arten von Druckguss und ihre Anwendungen
- Verschiedene Arten von Drehmaschinen und ihre Klassifizierung