


Robotik-Singularität:Was sie in Roboterarmen steckt
Quelle:www. idtechex.com
Der Einsatz von Roboterarmen in der Fertigungsindustrie nimmt zu, da immer mehr Unternehmen die Vorteile des Einsatzes von Roboterarmen nutzen. Wenn Sie Roboterarme in Ihre Geschäftsprozesse integrieren möchten, müssen Sie gut informiert sein. Suchen Sie nach einem hochwertigen Roboterarmhersteller, mit dem Sie qualitativ hochwertige Ergebnisse erzielen können.
Der Roboterarm umfasst den Körper, das Handgelenk und auch den Endeffektor. Der Endeffektor dient dazu, verschiedene Produkte festzuhalten oder verschiedene Aufgaben zu übernehmen. In den meisten Fällen benötigen Sie den Endeffektor, um sich präzise in verschiedene Richtungen zu bewegen. An dieser Stelle müssen Sie sicherstellen, dass Sie sich der Singularität des Roboters und deren Auswirkungen auf die Leistung Ihres Roboterarms bewusst sind. In diesem Artikel gehen wir eingehend auf die Singularität des Roboters ein und warum es wichtig ist, sie im Auge zu behalten. Quelle:www. technologyreview.com
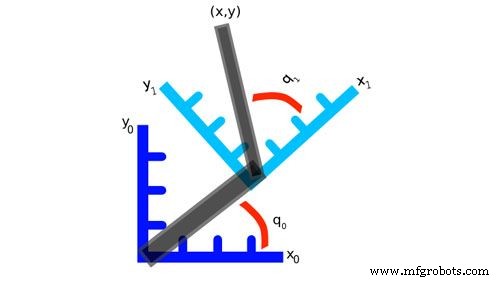
Robotersingularität bezieht sich auf eine Konfiguration, bei der die Bewegung des Roboterendeffektors in bestimmte Richtungen blockiert wird. Diese Konfiguration führt zu einer Einschränkung der Effizienz und Präzision des Roboterarms, mit dem Sie arbeiten. Im Allgemeinen arbeiten 6-Achsen-Roboterarme, indem sie sich in Bewegungen relativ zu den X-, Y- und Z-Achsen in einer 3D- oder kartesischen Ebene bewegen. Es besteht aus 6 Gelenken, die zu den 6 Freiheitsgraden beitragen, die der Roboterarm während der Aktion erfährt.
Dieser Freiheitsgrad ermöglicht es dem Roboterarm, sich in verschiedene Richtungen zu bewegen und die Aufgaben, für die er entwickelt wurde, leicht zu erfüllen. Wenn der Roboter-Endeffektor zufällig nicht in der Lage ist, zu den Produkten zu gelangen oder sich in die falsche Richtung bewegt, kommt hier das Problem der Singularität ins Spiel. Einige Singularitäten sind recht einfach zu identifizieren und zu lösen, sodass Sie zu Ihrem zurückkehren können Aufgaben. Auf der anderen Seite werden einige Roboter jedoch Schwierigkeiten haben, Singularitäten zu identifizieren, es sei denn mit Hilfe komplexer und langwieriger Formeln. Quelle:www. mecademic.com
Die Singularität von Robotern wird unterschiedliche Auswirkungen und auch Herausforderungen aufweisen, insbesondere bei der Identifizierung der spezifischen Probleme. Diese Herausforderungen variieren je nach einigen Faktoren des Roboterarms, mit dem Sie arbeiten werden. Die Komplexität und Schwere der Singularität Ihres Roboters hängt von der Anzahl der Gelenke, dem Robotertyp (linear oder rotatorisch) und der geometrischen Anordnung ab.
Ein Industrieroboterarm verfügt über zwei Bereiche, in denen er leicht gesteuert werden kann. Dies ist in der Regel der Gelenkraum und der kartesische Raum. Aufgrund der unterschiedlichen Bereiche, in denen der Roboterarm arbeitet, werden Sie feststellen, dass er zwei Sätze von Bewegungsbefehlen im Positionsmodus bietet.
Bei den Gelenkspaltbefehlen erhält der Roboter spezifische Anweisungen mit den gewünschten Gelenkspalten. Es bewegt sich dann, um jedes Gelenk in einer linearen und simultanen Translation in die vorgeschlagene Gelenkposition zu bringen. Mit den kartesischen Raumbefehlen wird dem Roboter die gewünschte Pose für den Endeffektor mit einer bestimmten kartesischen Bahn vorgeschlagen. Der kartesische Pfad ist entweder linear oder kreisförmig ausgelegt.
Damit sich der Roboter genau auf das kartesische Gelenk und die Befehle ausrichten kann, berechnet die Robotersteuerung die inverse Positions- und Geschwindigkeitskinematik des Roboters. Dies führt zu der richtigen Positionierung des Endeffektors, um die entworfene Aufgabe zu erfüllen. Wenn die Berechnungen jedoch falsch sind, treten die Singularitäten dort auf, wo Sie feststellen, dass der Endeffektor nicht genau positioniert ist. Dies zeigt Ihnen die Konfigurationen, die Sie vermeiden möchten, um zu verhindern, dass die Singularitätsprobleme Ihre Automatisierungsprozesse behindern. Quelle:www. würdevoll.com
Zugegebene Robotersingularitäten sollten unbedingt vermieden werden, damit Ihr Industrieroboterarm die gewünschten Aufgaben optimal erfüllen kann. Wenn Sie mehr über die Funktion der Robotersingularität erfahren, werden Sie besser verstehen, warum Sie versuchen sollten, sie zu vermeiden. Die Singularität von Robotern wird hauptsächlich mit zwei unterschiedlichen Funktionen in Verbindung gebracht. Quelle:studywolf. wordpress.com
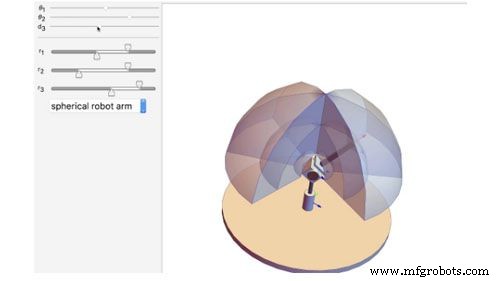
Betrachten Sie zwei kartesische Roboter, die verwendet werden, um ihre Endeffektoren in verschiedene Richtungen auszurichten. Die beiden Roboter verfügen über die sechsachsige Positionierung mit Stapeln von drei orthogonalen Linearführungen und drei Drehtischen. Wenn der eingesetzte Roboter die Achsen und Gelenke dort halten kann, wo sie sein sollen, ist die Ausrichtung des Endeffektors einfach.
Es kann den Endeffektor kontinuierlich entlang des 6D-Pfades innerhalb seines Arbeitsbereichs verwenden, während Präzision und Genauigkeit beibehalten werden. Wenn die Achsen und die Gelenke jedoch zusammenfallen, tritt eine Singularität auf und der Roboter kann sich nicht mehr mit den ihm zur Verfügung stehenden 6 Freiheitsgraden bewegen.
Bei diesem Roboter stellen Sie fest, dass er seinen Endeffektor nicht um die Achsen drehen kann, die mit den Drehgelenken zusammenfallen. Diese Art von Singularität wird oft als Gimbal-Lock bezeichnet. Da die meisten Singularitäten mit Hilfe von Gleichungen gelöst werden, wird es schwieriger, die Geschwindigkeit bestimmter kartesischer Vektoren zu bestimmen. Wenn die Singularität auftritt, behindert dies die Fähigkeit für Sie, die Intensität in Zahlen zu ermitteln, die mit den angezeigten Geschwindigkeiten verbunden sind.
Die Fähigkeit, die Geschwindigkeiten eines Roboterarms messen zu können, ist für die Einhaltung der Sicherheit unerlässlich. Wenn Sie mit einem Singularitätsproblem konfrontiert sind, stellen Sie fest, dass dies ein großes Risiko für die Robotik darstellt, obwohl sie noch nicht an diesem Punkt ist. Dies führt zu hohen Gelenkgeschwindigkeiten, die insbesondere dann gefährlich sein können, wenn Sie mit großen und schnellen Industrierobotern arbeiten. Aus diesem Grund ist es so wichtig, die Geschwindigkeiten, mit denen Sie arbeiten, abzubilden. Quelle:Youtube
Wenn es um Robotersingularität geht, beeinflusst sie nicht nur die inverse Geschwindigkeitskinematik, sondern rieselt auch auf die inversen Positionskinematikgleichungen herunter. Wenn Sie mit Industrierobotern arbeiten, werden Sie feststellen, dass sie Gleichungen und Lösungen für verschiedene Gelenkpositionen aufweisen. Die verschiedenen vorgestellten Lösungen sind eng mit den unterschiedlichen Konfigurationsarten verknüpft.
Wenn Ihr Roboter beispielsweise 8 einzigartige Lösungen für die Gelenkpositionen bis zur Endeffektorposition bietet, bietet er auch 8 verschiedene Konfigurationstypen. Um einen Konfigurationstyp zu ändern, müssten Sie eine Singularität durchlaufen. Singularitäten sind die Grenzen zwischen den 6D-Entitäten, die im kartesischen Arbeitsbereich eines typischen 6-Achsen-Roboters zu finden sind. Dies begrenzt die verschiedenen Konfigurationen, die Sie erreichen können, und die Arbeitsbereichsgrenzen, die Ihrem Industrieroboter zur Verfügung stehen. Quelle:Blog. grabcad.com
Angesichts der Tatsache, dass in jedem Industrieroboterarm, mit dem Sie arbeiten, Robotersingularitäten auftreten können, ist es wichtig zu wissen, dass es verschiedene Typen gibt. So wie der Roboterarm aus verschiedenen Teilen besteht, wirken sich die Singularitäten auch auf diese verschiedenen Teile aus, was zu einer Vielzahl von Problemen führt.
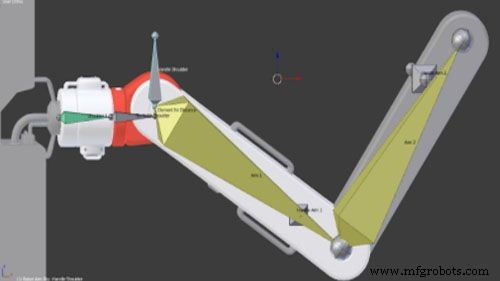
Dabei ist es wichtig, die unterschiedlichen Gelenkachsen von Industrieroboterarmen zu berücksichtigen. Sie werden mit 2 und 3 arbeiten, die parallel zu 2 und 3 sind, 1 und 4, die normal zu 2 und 3 sind, der Achse von Gelenk 5, die normal zu den Achsengelenken von 4 und 6 ist. Jetzt haben Sie ein besseres Verständnis der verschiedenen Achsen und Gelenken sind Sie an einem besseren Ort, um die Singularitätstypen zu erkunden. Zu den offensichtlichsten Arten von Singularitäten in einem vertikal gelenkigen Roboterarm gehören: Quelle:Sites. google.com
Wenn es um vertikal gelenkige Roboterarme mit Inline-Handgelenken geht, ist die Singularität der Handgelenke das häufigste Problem. Diese Art von Singularität tritt auf, wenn die Achsen der Gelenke 4 und 6 zusammenfallen. In diesem Fall kann das Handgelenk den Endeffektor nicht in Richtung der Achse von Gelenk 5 bewegen. Betrachten Sie bei der Anwendung einen Industrieroboterarm, der genau arbeitet.
Damit es einer Linie durch die Singularität folgt, müssen die Gelenke 4 und 6 gleichzeitig sein und sich um 90 Grad drehen. Dies geschieht in entgegengesetzten Richtungen, um sicherzustellen, dass der Prozess genau ist. Dies zeigt, dass das Überqueren einer Handgelenksingularität möglich ist. Sobald Sie jedoch die Singularität erreicht haben, bleibt der Endeffektor bewegungslos, während sich die beiden Gelenke drehen. Damit der Endeffektor die Singularität überqueren kann, muss er zuerst stoppen. Wenn es in Anwendung wäre, würde es die Genauigkeit des Industriearms während der Arbeit beeinträchtigen. Es gibt unzählige Lösungen für die Singularität des Handgelenks, die leicht implementiert werden können, um das Problem zu beheben. Quelle:www. electronicteacher.com
Die zweite Art von Singularität, auf die Sie beim Arbeiten mit vertikal gelenkigen Roboterarmen mit Inline-Handgelenken stoßen können, ist die Singularität des Ellenbogens. Es tritt hauptsächlich auf, wenn das Handgelenkzentrum auf der Ebene liegt, die durch die Achsen der Gelenke 2 und 3 verläuft. Als Handgelenkzentrum wird der Punkt verwendet, an dem sich die Achsen der Gelenke 4, 5 und 6 schneiden. Bei der Ellenbogen-Singularität werden Sie feststellen, dass der Arm vollständig gestreckt ist und auch einige Fälle aufweisen kann, in denen er nicht vollständig gefaltet werden kann. Diese Art von Singularität wird hauptsächlich durch die Achse und Position von Gelenk 3 bestimmt. Die Ellenbogen-Singularität bietet auch einige Lösungen, die Ihnen helfen können, Leistungsprobleme zu lösen, die Sie möglicherweise mit Ihrem Roboterarm haben. Diese Art von Singularität tritt recht häufig auf und kann leicht vorhergesagt und auch vermieden werden. Quelle:blenderartists. Organisation
Die letzte Singularität, auf die Sie möglicherweise stoßen, ist die Schultersingularität, die auftritt, wenn der Mittelpunkt des Roboterhandgelenks auf der Linie liegt, die durch die Achsen der Gelenke 1 und 2 verläuft. Diese Singularität ist die komplexeste unter den anderen, da sie nicht von . abhängt eine einzige gemeinsame Position. Bei der Schultersingularität wird die Bewegung in Richtung der Gelenkachse 2 begrenzt.
Damit der Roboter in der Anwendung einer Linie durch die Schultersingularität folgt, müssen sich die Gelenke 1 und 4 gleichzeitig in einem 90-Grad-Winkel drehen. Diese Rotation erfolgt wie bei der Handgelenksingularität in entgegengesetzte Richtungen, während der Endeffektor konstant bleibt. Wie bei der Handgelenksingularität ist die Bewegung durch die Schultersingularität möglich, jedoch muss der Endeffektor dazu anhalten. Diese Einzigartigkeit bietet auch einige Lösungen, die implementiert werden können, um sicherzustellen, dass der Roboterarm wieder optimal funktioniert. Quelle:www. istockphoto.com
Bei kollaborativen Robotern sind die Achsen der Gelenke 2, 3 und 4 parallel, die Achse von Gelenk 1 schneidet und verläuft senkrecht zu den Achsen von Gelenk 2. Außerdem gibt es auch die Gelenkachse 5, die sich schneidet und senkrecht zu den Achsen der Gelenke 4 und 6 steht. Wie die Singularitäten bei den Knickarmrobotern weisen auch diese Roboter unterschiedliche Lösungen in Bezug auf die verschiedenen Konfigurationstypen auf. Zu den in Cobots enthaltenen Arten von Singularitäten gehören:
Die Singularität des Handgelenks tritt bei diesen Robotern auf, wenn die Achsen der Gelenke 4 und 6 parallel werden. In dieser Situation können Sie feststellen, dass sich die Achsen der Gelenke 2, 3, 4 und 5 bewegen können, während der Endeffektor konstant bleibt.
Bei diesen Robotern tritt die Ellbogensingularität auf, wenn die Achsen der Gelenke 2, 3 und 4 in derselben Ebene liegen. Dies schränkt die Bewegung des Endeffektors stark ein und beeinflusst wiederum die Leistung des Roboterarms.
Die Schultersingularität tritt auf, wenn der Schnittpunkt der Achsen der Gelenke 5 und 6 in der Ebene liegt, die durch die Achsen der Gelenke 1 und 2 verläuft. Hier gibt es einige Lösungen, die implementiert werden können, um die Singularität zu beheben und einen funktionierenden Industrieroboter zu haben. Quelle:www. ennomotive.com
Angesichts der unterschiedlichen Auswirkungen der Robotersingularität auf die Herstellungsprozesse ist es unerlässlich, Möglichkeiten zu haben, diese zu vermeiden. Da verschiedene Arten von Robotern Singularitäten je nach Art des Roboters, mit dem Sie arbeiten, variieren können, wird ein grundlegendes Verständnis dafür, wie Sie diese vermeiden können, sicherstellen, dass Ihre Prozesse problemlos ablaufen. Im Allgemeinen können Singularitäten nur vermieden werden, indem sichergestellt wird, dass Ihre Roboterzellen richtig ausgelegt sind. Dies wirkt sich auch auf das Design der Adapterplatte aus, die Sie für Ihren Endeffektor verwenden.
Wenn Sie beispielsweise Ihren Roboterarm konfigurieren und einen Entnahmeort falsch zuweisen, um einer Handgelenksingularität zu entsprechen, können Sie nicht viel tun, um das Problem zu lösen. Damit muss nur geprüft werden, ob die Pose in einer nicht singulären Anwendung verwendet werden kann. Darüber hinaus können Singularitäten auch durch Hinzufügen kleiner Winkel zum Werkzeug vermieden werden. Dies trägt wesentlich dazu bei, die Wahrscheinlichkeit zu verringern, dass sich der Roboter in eine Singularität bewegt. Dies ist eine Technik, die hauptsächlich von Technikern verwendet wird, die die Mechanik verstehen und die Lösungen zu ihrem Vorteil optimieren können.
Schließlich können die Singularitäten auch vermieden werden, indem der Programmieransatz gewählt wird und die Mathematik Ihnen hilft, sich um die Dinge zu kümmern. Dabei werden Sie feststellen, dass die Anzahl der Achsen stark reduziert ist, um die Singularität zu vermeiden. Dies liegt hauptsächlich daran, dass eine höhere Anzahl von Achsen die Wahrscheinlichkeit des Auftretens von Singularitäten erhöht. Denken Sie daran, dass Singularitäten auftreten, wenn Achsen aufeinander ausgerichtet sind und die Bewegung der Roboterarme in bestimmte Richtungen blockieren. Eine Verringerung der Anzahl der Achsen verringert auch die Wahrscheinlichkeit, dass sie sich ausrichten und Blockierungen verursachen.
Die Singularität von Robotern ist ein großes Problem, das in verschiedenen industriellen Anwendungen von Roboterarmen und anderen Automatisierungsgeräten auftritt. Diese Probleme selbst zu lösen kann sich als lästig erweisen, weshalb Sie versuchen sollten, die Roboter-Singularität zu vermeiden. Wenn Sie jedoch auf dieses Problem stoßen, können Sie eine Lösung finden oder einen versierten Techniker einstellen, der sich um das Problem kümmert.
Bauen Sie alternativ eine enge Zusammenarbeit mit einem renommierten Hersteller von Automatisierungsgeräten auf, der Ihnen bei Auffälligkeiten hilft. Nehmen Sie sich Zeit, um sicherzustellen, dass Ihre Roboterausrüstung gut funktioniert, damit Sie sie vollständig anpassen und für Ihr Unternehmen nutzen können. 
Inhaltsverzeichnis
Was ist Roboter-Singularität

Was beeinflusst die Roboter-Singularität?
Funktionen der Roboter-Singularität

Der Rückgang der Geschwindigkeitszuordnung
Begrenzte interne Arbeitsbereichsgrenzen
Arten der Roboter-Singularität in einem vertikal gelenkigen Roboter

Handgelenkssingularität
Ellbogen-Singularität

Schulter Singularität
Arten der Singularität in einem sechsachsigen kollaborativen Roboter (Cobot)

Handgelenkssingularität
Ellbogen-Singularität
Schulter Singularität
Wie man Singularität in der Robotik vermeidet

Schlussfolgerung
Industrieroboter
- Roboterarbeitsumschlag:Was ist das?
- Verschiedene Freiheitsgrade bei Roboterarmen:Eine vollständige Erklärung
- Roboterwaffen in der Fertigung und ihre Vorteile
- Was sind die Vorteile von Roboterarmen für den Menschen?
- Was ist ein Roboterhandgelenk:Ein definitiver Leitfaden
- Was ist Roboterschweißen? - Verfahren und Anwendung
- Was sind Cobots?
- Vision-geführte Robotik
- Was ist Roboterschweißen? - Verfahren und Anwendung
- Was ist ein Getränkeroboter?