


Arten von Robotergelenken:Eine ausführliche Anleitung
Quelle:www. idtechex.com
Die Automatisierung in der Fertigungsindustrie gewinnt schnell an Dynamik, da immer mehr Unternehmen den Einsatz von Robotik übernehmen. Dies wird auf die Vorteile der Automatisierung in Unternehmen und den Einsatz intelligenterer und intelligenter Prozesse zurückgeführt. Sie erhalten mehr Produktion und reduzieren zudem das Verletzungsrisiko in der Fertigungsanlage. Die meisten Unternehmen neigen zum Einsatz von Roboterarmen, um unter anderem Pick &Place, Verpackung, Lackierung und Montage zu bewältigen.
Quelle:www. researchgate.net
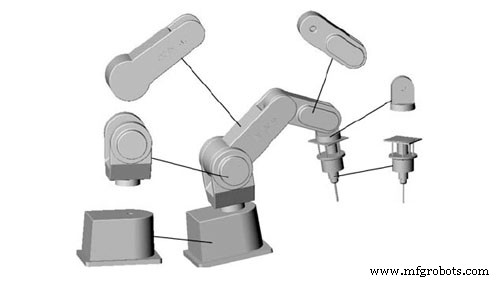
Robotergelenke beziehen sich auf die beweglichen Komponenten des Roboters, die zu Relativbewegungen zwischen benachbarten Gliedern führen. In diesem Zusammenhang werden Links verwendet, um sich auf die starren Elemente zu beziehen, die die Gelenke für eine klare und angemessene Funktion verbinden. Dies zeigt, dass der Industrieroboterarm die Verwendung einer Kombination von Verbindungen und Gelenken für eine optimale Funktionalität bietet. Es ist wichtig sicherzustellen, dass die Gelenke Ihres Manipulators entsprechend funktionieren, um Präzision und Genauigkeit während einer Anwendung zu gewährleisten.
Die Robotergelenke werden manchmal auch als Achsen bezeichnet. Sie sind unverzichtbar und praktisch, um sicherzustellen, dass die Bewegung des Arms nicht eingeschränkt oder beeinträchtigt wird. Wenn Sie mehr über die Robotergelenke erfahren, können Sie den Typ des Roboterarms bestimmen, mit dem Sie je nach den gewünschten Aufgaben arbeiten möchten. Quelle:www. britannica.com
Da es in der Fertigungsindustrie unterschiedliche Robotertypen gibt, finden Sie auch eine Vielzahl von mechanischen Gelenken. Diese Gelenke unterscheiden sich in der Bewegung und auch in der Anwendung, insbesondere wenn es um den zu verwendenden Robotertyp geht.
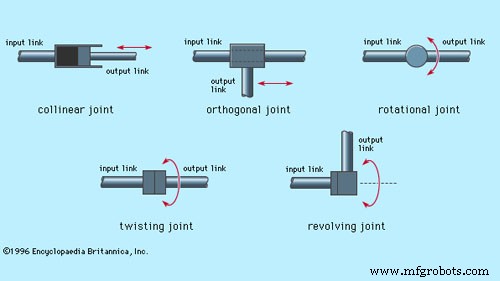
Wenn es um die mechanischen Gelenke von Roboterarmen geht, gibt es fünf Haupttypen, die Sie berücksichtigen müssen. Zwei der Gelenke sind linear, was bedeutet, dass die Relativbewegung zwischen den benachbarten Gliedern translatorisch ist. Andererseits sind die anderen drei drehbar, was bedeutet, dass die relative Bewegung der Glieder Drehungen zwischen ihnen beinhaltet. Zu den fünf Arten von mechanischen Gelenken für Roboter gehören:
In den Lineargelenken soll die Relativbewegung der benachbarten Glieder parallel sein. Dies bedeutet, dass die Eingangs- und Ausgangsverbindungen in einer linearen Bewegung gleiten. Diese Art der Bewegung führt zu einer translatorischen Bewegung. Diese Art von Linearbewegung kann auf verschiedene Weise erreicht werden, einschließlich der Verwendung des Teleskopmechanismus und des Kolbens. Diese Gelenkart wird auch als L-Gelenk bezeichnet.
Die orthogonalen Gelenke werden im Volksmund auch als O-Gelenke bezeichnet. Sie zeichnen sich durch eine relative Bewegung aus, die von der Eingangsverbindung und der Ausgangsverbindung aufgenommen wird. Diese Art der Bewegung der orthogonalen Gelenke ist eine translatorische Gleitbewegung. Im Gegensatz zur Anordnung der linearen Gelenke ist beim orthogonalen Gelenk der Ausgangslink jedoch senkrecht zum Eingangslink.
Wenn es um Drehgelenke geht, werden Sie die Verwendung von rotierenden Relativbewegungen finden, die für Robotermanipulatoren, die an mehreren Arbeitsbereichen arbeiten, praktisch sind. Diese Bewegungen werden mit der Drehachse senkrecht zu den Achsen der Eingangs- und Ausgangsglieder ausgeführt. Diese Drehgelenke werden auch als Typ-R-Gelenke bezeichnet.
Diese Art von Gelenk weist eine Drehbewegung auf, die im Gebrauch auch zu einem gewissen Grad an Drehung führt. Die Bewegung in diesen Gelenken erfolgt relativ zur Drehachse, die senkrecht zu den Achsen der Antriebs- und Abtriebsglieder steht. Die Drehgelenke werden auch als Typ-T-Gelenke bezeichnet.
Bei den Drehgelenken sieht es etwas anders aus als bei den anderen. Diese Gelenke verfügen auch über eine Drehbewegung, die bei verschiedenen Anwendungen nützlich ist. Die Bewegung dieser Gelenke zeichnet sich durch eine Bewegung zwischen den beiden Gliedern aus. Die Achse des Eingangsgliedes ist parallel zur Drehachse des Gelenks ausgelegt. Andererseits ist die Achse des Abtriebslenkers senkrecht zur Drehachse des Gelenks ausgebildet. Diese Art von Verbindung wird auch als Typ V-Verbindung bezeichnet. Quelle:www. technologyreview.com
Verschiedene Roboter werden die Verwendung verschiedener Arten von mechanischen Verbindungen aufweisen. Wenn Sie mehr über die verschiedenen Roboter erfahren, können Sie besser in einen Roboter investieren, der für Sie arbeitet. Zu den am häufigsten zu berücksichtigenden Robotern gehören:
Das Design des Knickarmroboters wird höchstwahrscheinlich mit unterschiedlichen Reichweiten und Kombinationen von Drehgelenken geliefert. Dieser Bereich kann einfache 2-Gelenk-Strukturen aufweisen und zu komplexeren Strukturen mit 10 oder mehr Gelenken übergehen. Bei dieser Konstruktion wird der Arm mit einem Drehgelenk mit der Basis verbunden, während die Glieder im Arm durch Drehgelenke verbunden sind.
Bei den kartesischen Robotern zeichnet sich die Konstruktion durch den Einsatz von drei Lineargelenken aus. Diese Gelenke sind auf der kartesischen Ebene mit X, Y und Z dargestellt. Diese Roboter können auch ein befestigtes Handgelenk mit einfacheren Drehgelenken für die Bewegung aufweisen. Diese besondere Art von Roboter wird auch als geradlinig oder Gantry bezeichnet.
Der zylindrische Roboter verfügt über ein Drehgelenk, das an der Basis befestigt ist, und ein Lineargelenk, mit dem die verschiedenen Glieder verbunden werden. Da zylindrische Roboter in einem zylindrisch geformten Arbeitsbereich arbeiten, sind die Rotations- und Linearbewegung praktisch, um sicherzustellen, dass Präzision erreicht wird.
Beim Polar-Design von Robotern wird der Arm über ein Drehgelenk mit der Basis verbunden. Gelegentlich finden Sie auch die Verwendung einer Kombination aus zwei Drehgelenken und einem Lineargelenk. Da dieser Roboter auch als kugelförmiger Roboter bezeichnet wird, wird der Arbeitsumfang auch kugelförmig sein. Die in diesem Roboter verwendeten Achsen bilden ein Polarkoordinatensystem, das dem Manipulator ein einfaches Arbeiten ermöglicht.
Der SCARA-Roboter ist bei vielen Herstellern eine beliebte Option, insbesondere bei denen, die ihre Montageprozesse automatisieren möchten. Dieser Roboter ist normalerweise zylindrisch und arbeitet in einem relativ zylindrischen Arbeitsbereich. Es zeichnet sich durch die Verwendung von zwei parallelen Gelenken aus, die sich beim Montageprozess als nützlich erweisen. Diese Gelenke sorgen für Nachgiebigkeit in einer ausgewählten Ebene, während der Roboter verwendet wird.
Die Delta-Roboter haben eine spinnenartige Konstruktion, die es ihnen ermöglicht, ihren Benutzern großartige Dienste anzubieten. Sie sind aus Parallelogrammen aufgebaut, die zusammengefügt und mit einer gemeinsamen Basis verbunden sind. Die Gelenke dieses Robotertyps sind sowohl rotatorisch als auch linear. Dadurch kann der Roboter ein einzelnes Ende der Armwerkzeugausrüstung in einem kuppelförmigen Arbeitsbereich bewegen. Es verbessert seine Leistung, um sicherzustellen, dass die Entwicklung verschiedener Aufgaben genau ausgeführt wird.
Wenn Sie mit Robotik arbeiten, um verschiedene Prozesse in Ihrem Unternehmen zu automatisieren, müssen Sie die verschiedenen Aspekte berücksichtigen. Diese Aspekte spielen eine große Rolle bei der Leistung der spezifischen Robotik, für die Sie sich entscheiden. Wenn es um den Einsatz von Industrieroboterarmen geht, sollten die Robotergelenke etwas sein, über das man auf dem Laufenden bleiben sollte.
Lernen Sie die verschiedenen Gelenke kennen und wie sie die Leistung des Roboters beeinflussen. Auf diese Weise können Sie die Art von Gelenken einschätzen, die für die Aktivitäten, die Sie automatisieren möchten, am besten geeignet sind. Sobald Sie das haben, können Sie in Roboterarme investieren, die mit den Gelenken geliefert werden, für die Sie auf dem Markt sind. Nehmen Sie sich Zeit und arbeiten Sie mit Herstellern von Automatisierungsgeräten zusammen, die Ihnen helfen. 
Stellen Sie bei der Integration von Roboterarmen in Ihr Unternehmen sicher, dass Sie mit einem hochwertigen Roboterarmhersteller zusammenarbeiten, der Ihnen das Beste bietet. Darüber hinaus ist es auch wichtig, ein grundlegendes Verständnis davon zu haben, was sie beinhalten. Der Roboterarm verfügt über den Körper, das Handgelenk und den Endeffektor, die spezifische Funktionen haben. Damit diese verschiedenen Teile genau funktionieren, müssen Robotergelenke vorhanden sein. In diesem Artikel werden wir uns mit den verschiedenen Robotergelenken befassen, um Ihnen ein besseres Verständnis zu ermöglichen. Inhaltsverzeichnis
Was sind Robotergelenke?
Arten mechanischer Gelenke für Roboter
Lineare Gelenke
Orthogonale Gelenke
Drehgelenke
Drehgelenke
Drehgelenke
Verschiedene Robotertypen und die verwendeten mechanischen Gelenke

Artikuliert
Kartesisch
Zylindrisch
Polar
SCARA
Delta
Schlussfolgerung
Industrieroboter
- C++-Datentypen
- C-Datentypen
- Ist SFM in der Bearbeitung?
- Top 10 der Hersteller von Industrierobotern im Jahr 2020
- Industrieroboter – Der ultimative Leitfaden
- Robotik in der Automobilherstellung
- Robot Warehouse System:Was es ist und wie es verwendet wird
- Robotergreifer:Was er ist und wie er für Roboter verwendet wird
- Was sind die Vorteile von Roboterarmen für den Menschen?
- Industrielle Automatisierung