


Leitfaden zum Schweißpositionierer 2026:Auswahl von 1-, 2- und 3-Achsen-Systemen

Von der EVST-Redaktion · Letzte Aktualisierung:11. Juni 2026
Ein Schweißpositionierer ist eine angetriebene Maschine, die ein Werkstück dreht, neigt oder anhebt, sodass auf jede Schweißnaht in flacher oder horizontaler Ausrichtung zugegriffen werden kann – die Positionen, die die höchste Schweißqualität und Abschmelzleistung liefern. Positionierer werden nach der Anzahl der angetriebenen Achsen kategorisiert:Einachsige Einheiten drehen sich um eine Achse, zweiachsige Einheiten fügen eine Neigungsfunktion hinzu und dreiachsige Einheiten ermöglichen eine zweite Drehung oder einen vertikalen Hub. Die Auswahl der richtigen Konfiguration hängt von der Teilegeometrie, dem Gewicht und davon ab, ob die Schweißung von einem menschlichen Bediener oder einem Roboter durchgeführt wird.
Warum ein Schweißpositionierer wichtig ist
Die Schweißqualität hängt untrennbar mit der Schweißposition zusammen. AWS D1.1, die Schweißnorm für Baustahl, legt fest, dass flache (1G/1F) und horizontale Positionen einen höheren Strom, eine schnellere Bewegung und eine bessere Verschmelzung ermöglichen, da die Schwerkraft das Schmelzbad stabilisiert. Ein Positionierer hält die Nähte während des Schweißvorgangs in diesen günstigen Ausrichtungen, sodass der Schweißer oder Roboter die Naht nicht um ein festes Teil herumführen muss.
Die Vorteile sind dreifach:höhere Abschmelzraten bei optimalen Parametern, geringere Fehlerraten durch die Vermeidung von Fehlpositionsschweißungen (die Hauptursache für Porosität und mangelnde Verschmelzung) und kürzere Zykluszeiten, da das Teil automatisch zur nächsten Naht weiterschaltet, anstatt manuell gelöst, gedreht und neu befestigt zu werden. In einer Roboterzelle ermöglicht ein Positionierer einem einzelnen Arm das Schweißen komplexer Geometrien in einem kontinuierlichen Programm. Weitere Informationen zum Roboterschweißen finden Sie in unserem Schweißroboter-Leitfaden für die Schwerindustrie.
Die drei Positioniererklassen nach Achsenanzahl
Jeder Schweißpositionierer passt aufgrund seiner angetriebenen Achsen in eine von drei Familien. Die Achsenanzahl bestimmt, welche Nähte flach dargestellt werden können und legt die erste Spezifikation für die Zellgröße fest.
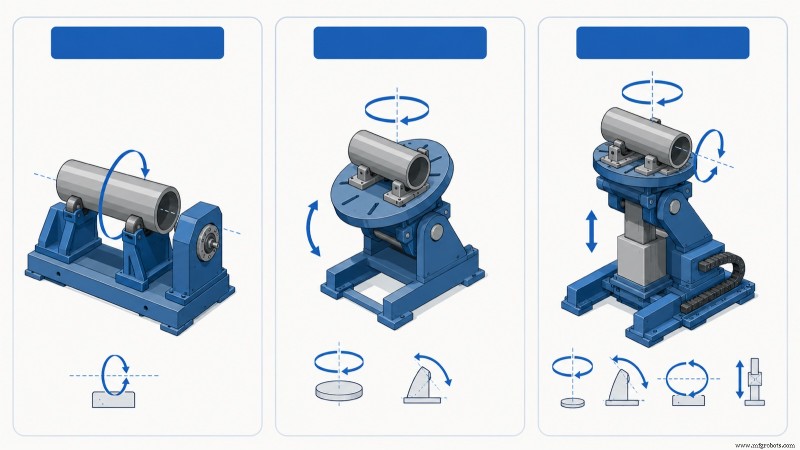
Einachsige Positionierer
Einachsige Einheiten ermöglichen eine einzelne angetriebene Bewegung – normalerweise eine Drehung um eine horizontale oder nahezu horizontale Achse. Sie sind die Arbeitstiere für zylindrische und rotationssymmetrische Teile wie Rohre, Druckbehältermäntel, Flansche und Wellen. Das Teil dreht sich unter einem festen Brenner, während die Naht in der flachen Position bleibt, ideal für Umfangsschweißungen. Die einachsige Baureihe von EVST – einachsiger Hauptkasten-Servopositionierer, einachsiger horizontaler Servopositionierer und einachsiger Kopf- und Reitstock-Schweißpositionierer – klemmt ein langes Teil zwischen einem angetriebenen Spindelstock und einem frei drehenden Reitstock, sodass es sich um seine eigene Mittellinie drehen kann.
Zwei-Achsen-Positionierer
Durch die Hinzufügung der Neigung zur Rotation drehen und neigen sich zweiachsige Einheiten, sodass jede Fläche eines kastenförmigen oder unregelmäßigen Teils in die flache Position gebracht werden kann. Diese Klasse ist die vielseitigste für allgemeine Fertigung, Schweißkonstruktionen, Halterungen, Rahmen und Maschinenbasen mit Nähten in mehreren Ebenen. Der Zwei-Achsen-Katalog von EVST umfasst L-Typ-, U-Typ-, C-Typ- und Plattformtyp-Konfigurationen, die sich hauptsächlich in der Tischunterstützung und dem Neigungsspielraum um sperrige Teile herum unterscheiden.
Drei-Achsen-Positionierer
Dreiachsige Positionierer kombinieren Drehung, Neigung und eine dritte angetriebene Bewegung – normalerweise eine zweite Drehung oder einen vertikalen Hub. Die zusätzliche Achse hält die Naht nicht nur flach, sondern auch auf einer konstanten Arbeitshöhe und Ausrichtung relativ zum Roboter, was die Programmierung großer oder hoher Baugruppen vereinfacht. EVST listet dreiachsige Servopositionierer mit vertikaler Gyration und horizontaler Gyration für diese schweren, geometriereichen Anwendungen auf.
| Klasse | Angetriebene Bewegungen | Geeignet für | Typische Paarung |
|---|---|---|---|
| Einzelachse | Nur Rotation | Rohre, Schalen, Flansche, Wellen, umlaufende Nähte | Manueller oder einzelner Roboter, fester Brenner |
| Zweiachsig | Rotation + Neigung | Schweißkonstruktionen, Rahmen, Halterungen mit mehrflächigen Nähten | Handbetrieb oder Roboter, allgemeine Fertigung |
| Dreiachsig | Rotation + Neigung + zweite Drehung/Hebung | Große, hohe oder geometriereiche Baugruppen | Roboterzelle, koordinierte Bewegung |
Spindelstock/Reitstock vs. Plattenteller:Ein häufiger Punkt der Verwirrung
Käufer fragen oft, ob sie einen „Positionierer“ oder einen „Spindelstock/Reitstock“ benötigen. Diese Begriffe beschreiben, wie das Teil unterstützt wird, und nicht konkurrierende Kategorien. Ein Positionierer im Drehtischstil legt das Teil auf einem einzelnen Drehtisch ab, der an einer Seite freitragend ist. Eine Spindel-/Reitstockanordnung stützt ein langes Teil an beiden Enden – ein Ende wird angetrieben, während das andere im Leerlauf läuft –, sodass sich das Teil auf einer stabilen Mittellinie dreht, ähnlich wie bei einer Drehmaschine.
Länge und Schlankheit bestimmen die Wahl. Kurze, kompakte Teile passen bequem auf einen einzigen Plattenteller. Lange Wellen, Träger oder Rotoren würden durchhängen oder schlagen, wenn sie freitragend wären, weshalb ein Spindelstock/Reitstock die richtige Lösung wäre. Bei extrem langen Teilen sorgt ein Reitstock mit eigener angetriebener Abstützung oder zwischenliegenden Lünetten dafür, dass die Durchbiegung innerhalb der Toleranz bleibt. In der Praxis entwerfen EVST-Ingenieure häufig Zwei-Stationen-Aufbauten:einen Zwei-Achsen-Tisch für kompakte Halterungen und einen Spindelstock/Reitstock für lange Rahmen, anstatt eine einzelne Maschine zu zwingen, beide Aufgaben schlecht auszuführen.
Spezifikationen, die die Auswahl beeinflussen
Sobald die Klasse ausgewählt ist, bestimmt eine übersichtliche Liste von Parametern die genaue Maschine. Dies sind die Zahlen, die ein Lieferant angeben muss und die ein Käufer anhand des schwersten und größten Teils der Familie vergleichen sollte.
- Nennlast — die maximale Masse, die der Tisch trägt. Die Größe bezieht sich auf das Teil plus seine Halterung, nicht auf das bloße Teil.
- Schwerpunkt und Exzentrizität — Die Tragfähigkeit nimmt ab, wenn sich der Schwerpunkt des Teils von der Tischfläche weg und von der Drehachse entfernt. Ein Positionierer, der für eine Last ausgelegt ist, bei der das CoG auf der Achse liegt, kann überlastet werden, wenn die gleiche Masse außermittig montiert wird.
- Drehzahl und Drehmoment – muss mit der Schweißgeschwindigkeit für den größten Durchmesser übereinstimmen und sicherstellen, dass die Oberflächengeschwindigkeit an der Naht innerhalb des Prozessfensters bleibt.
- Neigungsbereich und Geschwindigkeit – bei zwei- und dreiachsigen Einheiten der Winkelweg, der jede Naht flach macht, üblicherweise bis zu 90 oder 135 Grad, je nach Rahmentyp.
- Tischdurchmesser und T-Nutenmuster – definiert, wie die Vorrichtung montiert wird und die maximale Teilegröße, die die Fläche unterstützt.
- Erdungs-/Schleifringstrompfad — Zum Schweißen muss der Stellungsregler Strom über das Drehgelenk leiten, ohne dass ein Lichtbogen durch die Lager entsteht, was ein schweißgeeigneter Schleifring gewährleistet.
Der häufigste Fehler bei der Dimensionierung besteht darin, einen Positionierer ausschließlich nach dem Gewicht des Werkstücks zu bewerten und dabei die exzentrische Last zu ignorieren. Ein schweres Teil, dessen Masse von der Drehachse versetzt montiert ist, erzeugt ein Drehmoment, das der Antrieb in jedem Winkel halten muss; Das Überschreiten des Nenndrehmoments beim Kippen oder Drehen führt zum Abwürgen oder Rückwärtsfahren unter Last. EVST veröffentlicht auf Anfrage Last- und Momentgrenzwerte pro Modell und nicht eine einzelne Schlagzeile, da der sichere Grenzwert von der Position der Masse abhängt.
Manuelle vs. Roboterpositionierung
Ein Positionierer bedient zwei unterschiedliche Master. In einer manuellen oder halbautomatischen Werkstatt präsentiert es einem menschlichen Schweißer einfach die Naht in einer bequemen Höhe und einem bequemen Winkel, wobei der Bediener die Indexierung steuert. In einer Roboterzelle wird der Positionierer zu einer koordinierten Bewegungsachse:Die Robotersteuerung treibt den Positionierer und den Arm gemeinsam an, sodass sich Brenner und Naht gemeinsam bewegen und den idealen Arbeitswinkel bei gekrümmten oder zusammengesetzten Schweißnähten beibehalten.
Die koordinierte Bewegung unterscheidet einen Roboter-Schweißpositionierer von einem einfachen Drehtisch. Dazu ist es erforderlich, dass die Servoachsen des Positionierers von der Robotersteuerung gesteuert oder eng mit dieser synchronisiert werden. Aus diesem Grund verwenden Roboterpositionierer Servoantriebe mit Absolutwertgebern anstelle von Motoren mit variabler Frequenz. Einen kompletten Zellenaufbau – einschließlich Stromquelle, Roboter und Positionierer – finden Sie im EVST-Auswahlleitfaden für Schweißroboterzellen.
Wie man wählt:Ein Weg in fünf Schritten
- Profilieren Sie die Teilefamilie. Listen Sie die größten, schwersten und schwierigsten Teile auf, die die Zelle bewältigen muss. Größe auf den schlimmsten Fall, nicht auf den Durchschnitt.
- Achsenanzahl korrigieren. Nur Drehung für zylindrische Teile; Neigung für mehrebene Nähte hinzufügen; Fügen Sie eine dritte Achse nur hinzu, wenn große oder hohe Geometrien eine konstante Arbeitshöhe unter einem Roboter erfordern.
- Wählen Sie die Haltemethode. Einzeldrehtisch für Kompaktteile; Spindelstock/Reitstock für lange oder schlanke Teile, die sich verbiegen würden.
- Last mit Exzentrizität bestätigen. Überprüfen Sie die Nennlast am tatsächlichen Schwerpunktversatz, einschließlich der Vorrichtung, und nicht nur das Gewicht des bloßen Teils auf der Achse.
- Passen Sie die Schweißschnittstelle an. Schweißgeeigneter Schleifring für Strompfad, Servosteuerung für Roboterkoordination und Fahrgeschwindigkeiten, die auf Ihren Prozess abgestimmt sind.
Eine Modell-für-Modell-Anleitung der Positioniererreihe von EVST im Hinblick auf Nutzlast- und Neigungs-/Drehanforderungen sowie einen Pfad zu einem Angebot finden Sie im begleitenden Leitfaden „EVST-Schweißpositioniererauswahl 2026“. Um einen Positionierer mit alternativen Werkstückhandhabungsmaschinen zu vergleichen, lesen Sie „Schweißpositionierer vs. Drehtisch vs. Manipulator“.
EVSTs Schweißpositionierer-Reihe
EVST mit Hauptsitz in Chengdu und Fertigung in Wenling produziert im Rahmen seines Roboterschweißportfolios Schweißpositionierer für alle drei Achsklassen. Das veröffentlichte Sortiment umfasst einachsige Einheiten (Main Box Servo, Horizontal Servo und Head &Tail Stock), zweiachsige Einheiten (L-Typ, U-Typ, C-Typ und Plattformtyp) und dreiachsige Servopositionierer (vertikale Gyration und horizontale Gyration). Traglastwerte, Tischgrößen und Neigungsbereiche werden auf Anfrage pro Anwendung angegeben, da die sichere Kapazität von der Teilegeometrie und dem Schwerpunktversatz abhängt und nicht nur von der Masse.
Den Zertifizierungsunterlagen von EVST zufolge verfügt die Produktionslinie für Roboter- und Schweißautomatisierung über die IATF 16949-Qualitätszertifizierung für die Automobilindustrie, und die Produkte verfügen über CE-, SGS- und TÜV-Zertifizierungen Dritter. Positionierer werden üblicherweise als Teil einer kompletten Schweißzelle zusammen mit den QJAR-Schweißrobotern und der Stromquellenintegration von EVST geliefert, sodass die Dreh- und Neigungsachsen als koordinierte Bewegung mit dem Arm und nicht als eigenständiger Tisch in Betrieb genommen werden.
Häufig gestellte Fragen
Wofür wird ein Schweißpositionierer verwendet?
Ein Schweißpositionierer dreht, kippt oder hebt ein Werkstück an, sodass jede Schweißnaht in die flache oder horizontale Position gebracht werden kann, in der die Schweißqualität und die Abschmelzleistung am höchsten sind. Es verbessert die Schweißqualität, erhöht den Durchsatz, indem es das Schweißen in falscher Position vermeidet, und ermöglicht in einer Roboterzelle das Schweißen eines komplexen Teils mit einem Arm in einem einzigen kontinuierlichen Programm.
Was ist der Unterschied zwischen ein-, zwei- und dreiachsigen Positionierern?
Ein einachsiger Positionierer dreht das Teil um eine Achse, geeignet für zylindrische Teile und Umfangsnähte. Ein zweiachsiger Positionierer sorgt für zusätzliche Neigung, sodass Nähte auf mehreren Flächen eines kastenförmigen Teils flach dargestellt werden können. Ein dreiachsiger Positionierer fügt eine zweite Drehung oder einen vertikalen Hub hinzu und wird bei großen oder hohen Baugruppen verwendet, bei denen ein Roboter die Naht auf einer konstanten Höhe und Ausrichtung halten muss.
Wann benötige ich einen Spindelstock/Reitstock anstelle eines Drehtellers?
Verwenden Sie einen Spindelstock/Reitstock, wenn das Teil lang oder schlank ist, z. B. eine Welle, ein Balken oder ein Rotor, das durchhängen oder schlagen würde, wenn es nur auf einer Seite abgestützt würde. Der angetriebene Spindelstock und der Leerlauf-Reitstock halten das Teil auf einer stabilen Mittellinie, sodass es sich korrekt dreht. Kurze, kompakte Teile können auf einem einzigen rotierenden Drehteller sitzen.
Wie dimensioniere ich einen Schweißpositionierer richtig?
Vergleichen Sie die Größe mit dem schwersten und größten Teil der Familie, einschließlich seiner Halterung, und prüfen Sie die Nennlast am tatsächlichen Schwerpunktversatz, nicht nur am bloßen Gewicht auf der Rotationsachse. Eine exzentrische Last erzeugt ein Drehmoment, das der Antrieb in jedem Winkel halten muss; Ignorieren ist der häufigste Fehler bei der Größenbestimmung. Bestätigen Sie das Rotations- und Kippdrehmoment im Vergleich zum Worst-Case-Offset mit dem Lieferanten.
Kann ein Schweißpositionierer mit einem Roboter arbeiten?
Ja. In einer Roboterzelle wird der Positionierer zu einer koordinierten Bewegungsachse, die von der Robotersteuerung angetrieben oder mit dieser synchronisiert wird, sodass sich Brenner und Naht gemeinsam bewegen, um den idealen Arbeitswinkel beizubehalten. Positionierer in Roboterqualität verwenden Servoantriebe mit Absolutwertgebern und einen schweißgeeigneten Schleifring, um den Strom über das Drehgelenk zu leiten. Das ist es, was einen Roboter-Schweißpositionierer von einem einfachen Drehtisch unterscheidet.
Wohin als nächstes gehen
Um einen Positionierer an eine bestimmte Nutzlast und Neigungs-/Drehanforderung anzupassen und einen Weg zu einem Angebot zu finden, sehen Sie sich den Leitfaden zur EVST-Produktseite zur Auswahl des EVST-Schweißpositionierers von ein- bis dreiachsig an. Um zwischen einem Positionierer und anderen Handhabungsmaschinen zu entscheiden, lesen Sie „Schweißpositionierer vs. Drehtisch vs. Manipulator“. Die vollständige Roboterschweißzelle finden Sie in unserem Leitfaden für Schweißroboter und im Leitfaden zur Zellenauswahl. Für Beschaffungsfragen ist der EVST-Vertrieb über die Kontaktseite erreichbar.
Über den Autor:Das EVST-Redaktionsteam schreibt über Industrierobotik und intelligente Fertigung für Ingenieure und Betriebsleiter, die Automatisierungsprojekte bewerten. EVST (EVS TECH CO., LTD), 2018 in Chengdu gegründet, hat über 600 Automatisierungsprojekte durchgeführt und in mehr als 100 Länder geliefert, mit IATF 16949-Automobilzertifizierung und CE/SGS/TUV-Zertifizierungen Dritter für die QJAR-, kollaborativen Roboter-, SCARA- und Delta-Produktfamilien.
Industrieroboter
- Roboterbatterien ersetzen
- Wie Sie Automatisierung in Ihrer Produktionslinie installieren
- 7 Gründe für den Einsatz von Robotik in der chemischen Industrie
- Praktische Möglichkeiten zur Lösung von Arbeitskräftemangel mit Robotern
- Verringerung des Verletzungsrisikos durch Maschinenladeroboter
- Was ist der Unterschied zwischen Sechsachsen-, SCARA- und kartesischen Robotern?
- 15 Roboteranwendungen für die Elektronikindustrie
- Welche Branchen und Unternehmen Roboter einsetzen
- Kombination von maschinellem Sehen und neuronalen Netzen im IIoT
- Verlängerung der Lebensdauer Ihres Roboters durch ordnungsgemäße Wartung