


Positionierer, Drehtisch oder Manipulator? 2026 Expertenleitfaden zur Schweißautomatisierung

Von der EVST-Redaktion · Letzte Aktualisierung:11. Juni 2026
Schweißpositionierer, Drehtische und Manipulatoren bewegen alle ein Werkstück oder einen Brenner, um das Nahtschweißen zu rationalisieren, weisen jedoch jeweils eine bestimmte Einschränkung auf. Ein Positionierer richtet das Teil neu aus, sodass jede Naht in der optimalen flachen Position sitzt. Ein Drehtisch schaltet zwischen den Lade- und Schweißstationen hin und her und ermöglicht so das Laden, während der Roboter schweißt. Ein Manipulator trägt den Schweißkopf über große oder feste Teile und erreicht so eine Reichweite, die über die Kapazität einer rotierenden Vorrichtung hinausgeht. Die Auswahl der richtigen Ausrüstung hängt davon ab, ob Ihre primäre Einschränkung die Teileausrichtung, die Zyklusüberlappung oder die Brennerreichweite ist.
Die drei Maschinen, definiert
Es kommt oft zu Verwirrung, weil eine einzelne Zelle alle drei beherbergen kann. Die Klärung der Kernrolle jeder Maschine vereinfacht die Entscheidung.
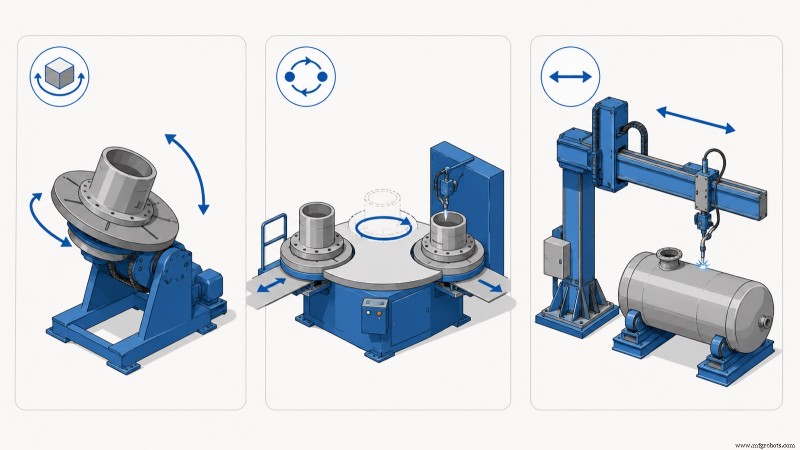
Schweißpositionierer
Ein Positionierer greift das Werkstück und dreht, kippt oder führt beide Bewegungen aus, um jede Naht in eine flache, horizontale Position zu bringen, in der Schweißqualität und Abschmelzraten maximiert werden. Wenn Schweißer mit nicht in der richtigen Position liegenden Nähten zu kämpfen haben, bietet ein Positionierer die größte Geschwindigkeits- und Qualitätsverbesserung – bis zu 30 % schnellere Bewegung gemäß den AWS D1.1-Richtlinien.
Schweißdrehtisch (Rundschalttisch)
Typischerweise handelt es sich um einen Drehtisch mit zwei Stationen. Der Drehtisch wechselt die Teile zwischen einer Lade-/Entladestation und einer Schweißstation. Während der Roboter oder das Schweißgerät eingeschaltet ist, kann ein Bediener das nächste Teil laden oder das fertige Teil entladen. Diese Überlappung erhöht die Stationsauslastung und führt oft zu einer Steigerung der Einschaltzeit des Roboters von etwa 50 % auf> 80 % des Zyklus.
Schweißmanipulator
Der Manipulator, auch „Säule und Ausleger“ genannt, bewegt den Brenner und nicht das Teil. Eine vertikale Säule trägt einen horizontalen Ausleger, der den Brenner (und manchmal auch einen Drahtvorschub oder ein Flussmittelsystem) über große Behälter, Tanks oder lange Fabrikate trägt, die sich nicht frei drehen können. Normalerweise wird es mit einem einachsigen Positionierer kombiniert, um das Schiff unter dem Ausleger zu drehen.
| Maschine | Was bewegt | Kernjob | Wenn es gewinnt |
|---|---|---|---|
| Positionierer | Teil (drehen/kippen) | Nähte in eine flache Position bringen | Nähte an einem beweglichen Teil sind nicht richtig positioniert |
| Drehtisch / Indextisch | Teil (Index zwischen Stationen) | Überlappende Belastung beim Schweißen | Lade-/Entladezeiten begrenzen den Durchsatz |
| Manipulator (Säule und Ausleger) | Fackel/Kopf | Reichweite der Nähte bei großen, festen Arbeiten | Das Teil ist zu groß, um es frei auszurichten |
So wählen Sie aus:Passen Sie die Maschine an die Einschränkung an
Der klarste Ansatz besteht darin, den Engpass in Ihrem aktuellen Prozess zu identifizieren und dann die Ausrüstung auszuwählen, die ihn beseitigt.
Wenn die Einschränkung die Schweißposition ist
Wenn Schweißer über Kopf oder in steilen Winkeln arbeiten oder ein Roboter den richtigen Arbeitswinkel nicht einhalten kann, liegt die Einschränkung in der Ausrichtung. Ein Positionierer löst dieses Problem, indem er das Teil flach ausrichtet. AWS D1.1 bestätigt, dass dies einen höheren Strom und eine höhere Verfahrgeschwindigkeit unterstützt, was zu erheblichen Qualitäts- und Geschwindigkeitssteigerungen führt. Zweiachsige Positionierer verarbeiten Nähte auf mehreren Ebenen; Einachsige Einheiten eignen sich für zylindrische Geometrien.
Wenn die Einschränkung die Ladezeit ist
Wenn der Roboter oder Schweißer untätig herumsitzt und auf Teile wartet, liegt der Engpass in der Zyklusüberlappung. Ein Drehtisch mit zwei Stationen verschiebt die Beladung aus dem kritischen Pfad, wodurch die Roboterauslastung oft um 30–40 % verbessert wird und eine kostengünstige Durchsatzsteigerung erzielt wird.
Wenn die Einschränkung die Teilegröße ist
Bei großen Behältern, Tanks oder langen Strukturen, die sich nicht frei drehen können, ist die Reichweite die Einschränkung. Ein Manipulator, normalerweise gepaart mit einem einachsigen Positionierer, lässt den Brenner entlang der Naht fahren, während sich das Teil unter dem Ausleger dreht – Standard bei der Herstellung von Druckbehältern und Rohrspulen.
Sie arbeiten oft zusammen
In der Praxis fragt eine Schweißzelle selten:„Welches?“; Es wird gefragt:„Welche Kombination?“ Eine Schwerfertigungszelle könnte einen einachsigen Positionierer zum Drehen des Behälters mit einem Säulen- und Auslegermanipulator kombinieren, um den Kopf entlang der Naht zu bewegen. Eine Roboter-Werkstattzelle könnte einen Drehtisch mit zwei Stationen zur Ladungsüberlappung mit zweiachsigen Positionierern auf jeder Seite zur Nahtausrichtung kombinieren, sodass ein Roboter ein Teil schweißen kann, während ein Bediener das andere nachlädt. Durch die Benennung jeder Maschine nach ihrer Funktion – Ausrichtung, Überlappung oder Reichweite – bleiben Layoutentscheidungen klar, auch wenn alle drei nebeneinander vorhanden sind.
In automatisierten Zellen werden alle drei Systeme zu koordinierten Bewegungsachsen, die von der Roboter-SPS gesteuert werden. Spezifikationen und Angebote für den Roboter, die Stromquelle und den Positionierer werden im EVST-Auswahlleitfaden für Schweißroboterzellen zusammen dargestellt.
Kosten und Komplexität in Kürze
Grob gesagt ist ein einachsiger Positionierer die einfachste und kostengünstigste Option; ein Drehtisch mit zwei Stationen fügt einen zweiten Vorrichtungssatz und Indexierungsmechanismus hinzu; Ein Säulen- und Auslegermanipulator ist aufgrund seiner Struktur und Reichweite typischerweise der kapitalintensivste. Der wahre Vergleich sind jedoch die Kosten pro guter Schweißnaht bei Ihrem Durchsatzziel. Ein Drehtisch, der die Roboterauslastung verdoppelt, kann seinen Preis schnell amortisieren, wohingegen ein übergroßer Manipulator, der für ein nur zweimal im Jahr geschweißtes Teil gekauft wird, die Investition möglicherweise nicht rechtfertigt. Eine detaillierte ROI-Analyse zu Positionierern finden Sie im Kosten- und ROI-Leitfaden für Schweißpositionierer von EVST.
EVSTs Werkstückhandhabungssortiment
EVST mit Hauptsitz in Chengdu und Fertigung in Wenling bietet neben QJAR-Schweißrobotern und Stromquellenintegration auch Schweißpositionierer in Einzel-, Zwei- und Drei-Achsen-Klassen als Teil kompletter Roboterschweißzellen an. Positionierer können mit Indexierungsstationen und Kopftragstrukturen kombiniert werden, sodass Teileausrichtung, Lastüberlappung und Brennerreichweite gemeinsam für eine bestimmte Teilefamilie entwickelt werden, anstatt als separate Maschinen gekauft zu werden.
Die Roboter- und Schweißautomatisierungslinie von EVST verfügt über die Automobilqualitätszertifizierung IATF16949 sowie CE-, SGS- und TÜV-Zertifizierungen Dritter. Da die richtige Lösung in der Regel eine Kombination ist, dimensioniert EVST die Handhabungsausrüstung anhand des Worst-Case-Teils und des Durchsatzziels zusammen, anstatt eine einzelne Maschine isoliert zu verkaufen.
Häufig gestellte Fragen
Was ist der Unterschied zwischen einem Schweißpositionierer und einem Drehtisch?
Ein Schweißpositionierer dreht und kippt das Teil, um jede Naht flach zu machen und so ein Orientierungsproblem zu lösen. Ein Drehtisch oder Indextisch tauscht Teile zwischen Lade- und Schweißstationen aus und löst so ein Zyklusüberlappungsproblem. Sie werden oft kombiniert; Ein Drehtisch kann auf jeder Seite Positionierer tragen.
Wofür wird ein Schweißmanipulator verwendet?
Ein Schweißmanipulator bewegt den Brenner und nicht das Teil. Es ist ideal für große Behälter, Tanks und lange Anlagen, die sich nicht frei drehen können. Es wird normalerweise mit einem einachsigen Positionierer kombiniert, der das Teil unter dem Ausleger dreht.
Benötige ich einen Positionierer oder einen Manipulator?
Wählen Sie nach Teilegröße. Wenn das Teil gedreht und geneigt werden kann, um die Nähte zu glätten, reicht ein Positionierer aus und ist einfacher. Wenn das Teil zu groß ist, um sich frei auszurichten, und der Brenner zur Naht fahren muss, ist ein Manipulator – normalerweise mit einem einachsigen Positionierer – erforderlich. Viele Zellen der Schwerindustrie nutzen beides.
Kann eine Zelle einen Positionierer, einen Drehtisch und einen Manipulator zusammen verwenden?
Ja, und das tun viele. Jedes löst eine andere Einschränkung – Ausrichtung, Lastüberlappung oder Reichweite – daher werden sie in einer Zelle oft kombiniert. In automatisierten Zellen werden sie als koordinierte Bewegungsachsen unter der Robotersteuerung beauftragt.
Welche Option bietet die größte Durchsatzverbesserung?
Es kommt auf den Engpass an. Wenn Schweißer außerhalb der Position arbeiten, bietet ein Positionierer den größten Qualitäts- und Geschwindigkeitsgewinn. Wenn der Roboter auf die Beladung wartet, bietet ein Drehtisch mit zwei Stationen den größten Auslastungsgewinn. Wenn das Teil zu groß ist, um es auszurichten, ist ein Manipulator die Maschine, die es ermöglicht. Identifizieren Sie zuerst die Einschränkung und wählen Sie dann die Maschine aus, die sie beseitigt.
Wohin als nächstes gehen
Technische Details zu Positioniererklassen finden Sie im Welding Positioner Guide . Um einen EVST-Positionierer an Ihr Teil anzupassen und ein Angebot zu erhalten, sehen Sie sich die Positioniererauswahl an Seite. Die komplette Roboterschweißzelle finden Sie in unserem Schweißroboter-Leitfaden und der Leitfaden zur Zellauswahl . Bei Beschaffungsfragen wenden Sie sich über die Kontaktseite an den EVST-Vertrieb .
Über den Autor:Das EVST-Redaktionsteam schreibt über Industrierobotik und intelligente Fertigung für Ingenieure und Betriebsleiter, die Automatisierungsprojekte bewerten. EVST (EVS TECH CO., LTD), 2018 in Chengdu gegründet, hat mehr als 600 Automatisierungsprojekte durchgeführt und in mehr als 100 Länder geliefert, mit IATF16949-Automobilzertifizierung und CE/SGS/TUV-Zertifizierungen Dritter für die QJAR-, kollaborativen Roboter-, SCARA- und Delta-Produktfamilien.
Industrieroboter
- Die internen Teile, die den Motoman SV3XL betreiben
- Aluminiumschweißautomatisierung
- Verbesserung der Ästhetik mit gebrauchten Motoman-Schleifrobotern
- Auspuff und Konverter in Ypsilanti, Michigan
- Wie viele versteckte Schichten und versteckte Knoten benötigt ein neuronales Netzwerk?
- Industrieroboter in der Automobilindustrie
- Lean Manufacturing:Lohnt es sich wirklich? 16 große Vorteile Sagen Sie „Ja“.
- 15 zuverlässige Möglichkeiten für Hersteller, Ausfallzeiten zu reduzieren
- Fokussieren der Schweißnaht beim Plasmaschweißen
- Stellen Sie die Software für die Roboter-Fertigungslinie zusammen