


Induktionsmotoren mit gewickeltem Rotor
Ein gewickelter Rotor Induktionsmotor hat einen Stator wie ein Käfigläufer-Induktionsmotor, aber einen Rotor mit isolierten Wicklungen, die über Schleifringe und Bürsten herausgeführt werden.
An die Schleifringe wird jedoch keine Leistung angelegt. Ihr einziger Zweck besteht darin, während des Starts den Widerstand in Reihe mit den Rotorwicklungen zu schalten (Abbildung unten). Dieser Widerstand wird kurzgeschlossen, sobald der Motor gestartet wird, damit der Rotor elektrisch wie das Gegenstück des Kurzschlussläufers aussieht.
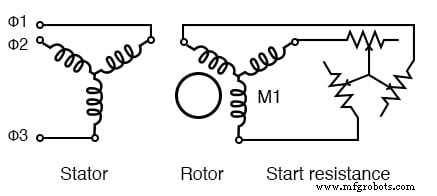
Induktionsmotor mit gewickeltem Rotor
F: Warum einen Widerstand in Reihe mit dem Rotor schalten?
A: Käfigläufer-Asynchronmotoren ziehen beim Anlauf 500 % bis über 1000 % des Volllaststroms (FLC). Dies ist zwar bei kleinen Motoren kein schwerwiegendes Problem, aber bei großen (10 kW) Motoren.
Das Anordnen eines Widerstands in Reihe mit den Rotorwicklungen verringert nicht nur den Anlaufstrom, den Strom bei blockiertem Rotor (LRC), sondern erhöht auch das Anlaufdrehmoment, das Drehmoment bei blockiertem Rotor (LRT). Die Abbildung unten zeigt, dass durch Erhöhung des Rotorwiderstands von R0 zu R1 zu R2 , wird die Kippdrehmomentspitze nach links auf die Drehzahl Null verschoben.
Beachten Sie, dass diese Drehmomentspitze viel höher ist als das Startdrehmoment, das ohne Rotorwiderstand verfügbar ist (R0 ) ist der Schlupf proportional zum Rotorwiderstand und das Auszugsdrehmoment ist proportional zum Schlupf. Somit wird beim Starten ein hohes Drehmoment erzeugt.
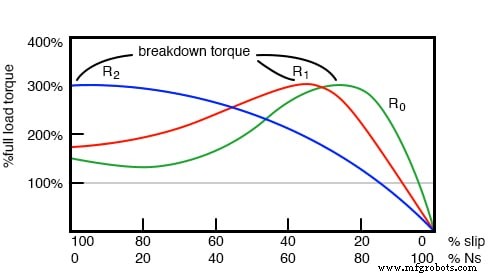
Die Drehmomentspitze wird durch Erhöhung des Rotorwiderstands auf Null verschoben
Der Widerstand verringert das bei voller Laufgeschwindigkeit verfügbare Drehmoment. Aber dieser Widerstand ist kurzgeschlossen, wenn der Rotor gestartet wird. Ein kurzgeschlossener Rotor funktioniert wie ein Käfigläufer. Die beim Anlauf entstehende Wärme wird größtenteils außerhalb des Motors im Anlaufwiderstand abgeführt.
Die mit Bürsten und Schleifringen verbundene Kompliziertheit und Wartung ist ein Nachteil des gewickelten Rotors im Vergleich zum einfachen Käfigläufer.
Dieser Motor ist zum Starten von Lasten mit hoher Trägheit geeignet. Ein hoher Anlaufwiderstand stellt das hohe Auszugsmoment im Stillstand zur Verfügung. Zum Vergleich:Ein Käfigläufer weist nur bei 80 % seiner Synchrondrehzahl ein Ausziehdrehmoment (Spitzendrehmoment) auf.
Geschwindigkeitskontrolle
Die Motordrehzahl kann variiert werden, indem ein variabler Widerstand wieder in den Rotorkreis eingeführt wird. Dadurch werden Rotorstrom und -drehzahl reduziert. Das bei Nulldrehzahl verfügbare hohe Anlaufdrehmoment, das heruntergeschaltete Kippdrehmoment, steht bei hoher Drehzahl nicht zur Verfügung.
Siehe R2 Kurve bei 90% Ns, die Abbildung unten. Widerstände R0 , R1 , R2 , R3 Wertsteigerung von Null.
Ein höherer Widerstand bei R3 reduziert die Geschwindigkeit weiter. Die Drehzahlregelung ist in Bezug auf wechselnde Drehmomentbelastungen schlecht. Diese Geschwindigkeitsregeltechnik ist nur in einem Bereich von 50 % bis 100 % der vollen Geschwindigkeit nützlich.
Die Geschwindigkeitsregelung funktioniert gut bei Lasten mit variabler Geschwindigkeit wie Aufzügen und Druckmaschinen.
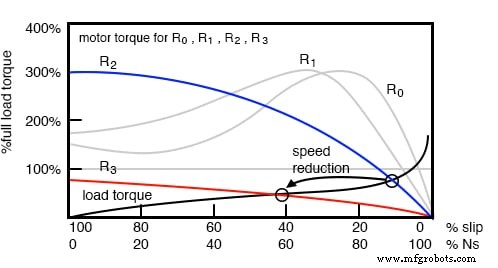
Der Rotorwiderstand steuert die Geschwindigkeit des Induktionsmotors mit gewickeltem Rotor
Doppelgespeister Induktionsgenerator
Wir haben zuvor einen Käfigläufer-Induktionsmotor beschrieben, der als Generator wirkt, wenn er schneller als die Synchrondrehzahl angetrieben wird. (Siehe Asynchronmotor-Generator) Dies ist ein einfach gespeister Asynchrongenerator , die nur elektrische Verbindungen zu den Statorwicklungen haben.
Ein Induktionsmotor mit gewickeltem Rotor kann auch als Generator wirken, wenn er über der Synchrondrehzahl angetrieben wird. Da sowohl der Stator als auch der Rotor Verbindungen haben, wird eine solche Maschine als doppeltgespeister Asynchrongenerator bezeichnet (DFIG).
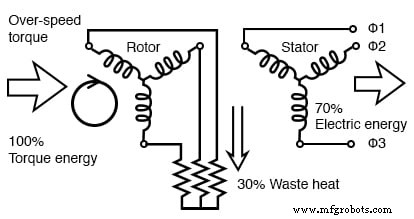
Rotorwiderstand ermöglicht Überdrehzahl des doppelt gespeisten Induktionsgenerators
Der einfach gespeiste Asynchrongenerator hatte bei Antrieb mit störendem Windmoment nur einen nutzbaren Schlupfbereich von 1%. Da die Drehzahl eines Induktionsmotors mit gewickeltem Rotor über einen Bereich von 50-100% gesteuert werden kann, indem ein Widerstand in den Rotor eingefügt wird, können wir dasselbe von einem doppelt gespeisten Induktionsgenerator erwarten.
Wir können den Rotor nicht nur um 50 % verlangsamen, sondern auch um 50 % überdrehen. Das heißt, wir können die Drehzahl eines doppelt gespeisten Asynchrongenerators um ±50% von der Synchrondrehzahl abweichen. In der Praxis sind ±30 % praktischer.
Wenn der Generator überdreht, absorbiert ein Widerstand im Rotorkreis überschüssige Energie, während der Stator konstant 60 Hz in das Stromnetz einspeist (Abbildung oben). Im Falle einer Unterdrehzahl kann ein in den Rotorkreis eingefügter negativer Widerstand das Energiedefizit ausgleichen, so dass der Stator immer noch die Stromleitung mit 60 Hz Leistung speisen kann.
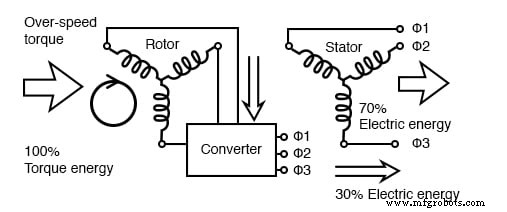
Umrichter gewinnt Energie aus dem Rotor des doppelt gespeisten Induktionsgenerators
In der Praxis kann der Rotorwiderstand durch einen Wandler ersetzt werden, der Leistung vom Rotor aufnimmt und Leistung in die Stromleitung einspeist, anstatt sie abzuführen. Dies verbessert die Effizienz des Generators.
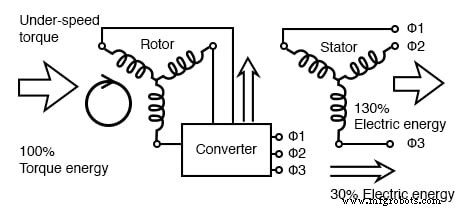
Umrichter entnimmt Energie aus der Stromleitung für den Rotor des doppelt gespeisten Induktionsgenerators, sodass er unter der Synchrondrehzahl gut funktioniert
Der Umrichter kann Leistung von der Leitung für den unterlaufenden Rotor „ausleihen“, die sie an den Stator weiterleitet. Die geliehene Leistung wird zusammen mit der größeren Wellenenergie zum Stator geleitet, der mit der Stromleitung verbunden ist.
Der Stator scheint 130% der Leistung an die Leitung zu liefern. Denken Sie daran, dass sich der Rotor 30 % „leiht“ und die Linie mit 100 % für die theoretisch verlustfreie DFIG übrig lässt.
Eigenschaften von Induktionsmotoren mit gewickeltem Rotor
- Exzellentes Anlaufdrehmoment für hohe Trägheitslasten.
- Niedriger Anlaufstrom im Vergleich zum Käfigläufer-Asynchronmotor.
- Geschwindigkeit ist die Widerstandsvariable über 50 % bis 100 % der vollen Geschwindigkeit.
- Höhere Wartung von Bürsten und Schleifringen im Vergleich zu Käfigläufermotoren.
- Die Generatorversion der Wickelläufermaschine wird als doppeltgespeister Asynchrongenerator bezeichnet , eine Maschine mit variabler Geschwindigkeit.
VERWANDTES ARBEITSBLATT:
- Arbeitsblatt zur Theorie des Wechselstrommotors
Industrietechnik
- Elektromagnetisches Induktionsexperiment
- Induktionsmotor
- Einphasen-Asynchronmotoren
- AC-Kommutatormotoren
- Induktiver Positionssensor für Industriemotoren bietet hohe Geschwindigkeit und hohe Genauigkeit
- So beheben Sie Fehler bei Motoren mit gewickeltem Rotor
- Elektromotoren-Tipp:Minimieren Sie Ihre Startzeiten
- Vorteile von flüssigkeitsgekühlten Motoren
- 7 Schritte zur Gewährleistung einer verbesserten Wartung von Elektromotoren
- Gleichstrom- und Wechselstrommotoren:Was sind ihre Unterschiede?