


Roboter drahtlos über Bluetooth-Befehle steuern Thesenbericht | Diy-Projekt
Ein Roboter ist definiert als eine mechanische Konstruktion, die in der Lage ist, menschliche Aufgaben auszuführen oder sich menschenähnlich zu verhalten. Der Bau eines Roboters erfordert Fachwissen und komplexe Programmierung. Es geht darum, Systeme zu bauen und neben anderen wichtigen Komponenten Motoren, Sonarsensoren und Kabel zusammenzubauen | Abschlussprojekt für die Studierenden der Elektro- und Kommunikationstechnik | Elektrotechnik.
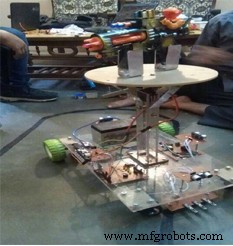 Dieses Dokument behandelt das Design und die Konstruktion eines Roboters, der den Feind wahrnehmen kann. Dieser Roboter implementiert die folgenden Konzepte:Umweltsensorik, proportionale Motorsteuerung. Dieser Roboter verarbeitet Informationen von seinen verschiedenen Sensoren und wichtigen Hardwareelementen über einen Mikrocontroller (Arduino Mega). Es verwendet Sonarsensoren, um den Brandunfall zu erkennen. Ein Roboter, der in der Lage ist, den Feind zu erkennen und ihn zu erschießen. Sonarsensoren werden für die anfängliche Erkennung verwendet. Sobald der Feind erkannt wird, schaltet der Roboter innerhalb von Sekunden automatisch seinen Summer ein, der Roboter wird aktiviert und beginnt, auf den Feind zu schießen. Das Projekt trägt dazu bei, Interesse und Innovationen in den Bereichen der Robotik zu wecken und gleichzeitig an einer praktischen und erhältlichen Lösung zu arbeiten, um Leben zu retten und das Risiko von Sachschäden zu mindern.
Dieses Dokument behandelt das Design und die Konstruktion eines Roboters, der den Feind wahrnehmen kann. Dieser Roboter implementiert die folgenden Konzepte:Umweltsensorik, proportionale Motorsteuerung. Dieser Roboter verarbeitet Informationen von seinen verschiedenen Sensoren und wichtigen Hardwareelementen über einen Mikrocontroller (Arduino Mega). Es verwendet Sonarsensoren, um den Brandunfall zu erkennen. Ein Roboter, der in der Lage ist, den Feind zu erkennen und ihn zu erschießen. Sonarsensoren werden für die anfängliche Erkennung verwendet. Sobald der Feind erkannt wird, schaltet der Roboter innerhalb von Sekunden automatisch seinen Summer ein, der Roboter wird aktiviert und beginnt, auf den Feind zu schießen. Das Projekt trägt dazu bei, Interesse und Innovationen in den Bereichen der Robotik zu wecken und gleichzeitig an einer praktischen und erhältlichen Lösung zu arbeiten, um Leben zu retten und das Risiko von Sachschäden zu mindern. 1.1 Übersicht
Das Projekt umfasst eine drahtlos gesteuerte Hierarchie des Roboters, da er durch die Befehle des Bluetooth-Geräts gesteuert wird, das die Bewegung des Roboters steuert. Der Roboter ist vollständig ferngesteuert und bietet eine vollständige Sicht auf den Bereich, der gesteuert werden soll.1.2 Ziele und Vorgaben:
Das Hauptziel des Projekts ist es, Sicherheit in Gebieten zu schaffen, die nicht von Streitkräften kontrolliert werden können. Daher kann dieser Roboter aufgrund seiner Größe und einfachen Steuerung diese Orte betreten.Ziele: • Bereitstellen einer Fernüberwachungs- und Steuerungsanwendung für die Analyse. • Erlauben Sie dem Benutzer, den Feind mit dem Roboterarm zu manipulieren. • Visuelles Feedback für den gesicherten Ort zu geben. • Bereitstellung einer sehr benutzerfreundlichen Steuerungsanwendung. 1.3 Systemerklärung zum Geltungsbereich :Der Roboter verwendet eine Steuerungsanwendung auf der Benutzerseite, um den Roboter mithilfe der drahtlosen Technologie fernzusteuern. Eingaben des Benutzers werden seriell über ein Bluetooth-Gerät an den Roboter übertragen, wo sie empfangen, identifiziert und an das entsprechende Modul weitergeleitet werden. · Die Eingaben an das System stammen vom Benutzer für die Bewegung des Roboters. · Diese Eingabe wird zuerst von der Steuerungsanwendung verarbeitet und seriell über eine Bluetooth-Verbindung übertragen. Diese Eingabe wird dann am Roboter empfangen und erneut verarbeitet. · Die Ausgabe des Systems ist das verarbeitete Signal an das entsprechende Modul. Dieses Modul kann ein Motor der Basis des Roboters sein.
Wichtige Inputs und Outputs:
· Eingangssignale · Bewegung des Roboterarms · Bewegung des Roboters. Wir haben ihn als Assistenzroboter für das Sicherheitsteam entwickelt, aber es gibt eine Reihe anderer Anwendungen dieses Roboters. Es kann verwendet werden von: • Polizei:In Geiselsituationen • Militär:Für Aufklärungsmissionen • Luftwaffenstützpunkte:Wird für den Umgang mit gefährlichen oder radioaktiven Materialien verwendet.1.4 Theoretische Grundlagen und Organisation
Die Diplomarbeit besteht aus fünf Kapiteln. Eine kurze Erläuterung finden Sie hier: Kapitel 1:EinführungDieses Kapitel befasst sich mit der Frage nach dem Hintergrund der Ziele und der Forschungsstruktur der Dissertation
. Kapitel 2:Literaturüberblick In diesem Kapitel werden hauptsächlich Bluetooth-Geräte behandelt. Ein Teil der Literatur zu diesem Thema der Diplomarbeit ist ebenfalls in diesem Kapitel enthalten. Kapitel 3:Tools und Techniken In diesem Kapitel werden alle Tools und Software behandelt, die für die Projekterstellung verwendet werden Kapitel 4:Methoden Das Kapitel 4 konzentriert sich hauptsächlich auf das Verfahren, die Methode und die Theorieimplementierung durch Simulationsdesign des vorgeschlagenen Feinderkennungsroboters im Zusammenhang mit dem Thema der Diplomarbeit. Kapitel 5:Ergebnis und AnalyseDer Roboter ist praktisch getestet und verifiziert. Die Tests umfassen die Effizienz des Entwurfs des Robotersensorsystems und seine Leistung.
Kapitel 6:Fazit Abschließend wird ein Fazit zu den erzielten Ergebnissen gezogen. Dazu gehören auch die Neuheiten innerhalb der Arbeit und Vorschläge für zukünftige Arbeiten.Hoffentlich hilft dieser Artikel Universitätsstudenten, die einen Bachelor oder Master in Elektronik und Kommunikation .Bitte kontaktieren Sie uns für einen vollständigen Abschlussbericht
Industrietechnik
- Die Zukunft der Robotik
- Raspberry Pi Roboter über Bluetooth gesteuert
- So wird Ihre erste Roboterintegration ein Erfolg
- Steuerung von Haushaltsgeräten über das Internet oder Mobilgerät
- Arduino mit Bluetooth zur Steuerung einer LED!
- Über Ethernet gesteuerter Roboterarm
- PID-Steuerungslinien-Follower-Roboter
- Bluetooth-gesteuerter Roboter zur Hindernisvermeidung
- Überleben eines Steuerungssystem-Migrationsprojekts
- PID-Steuerung eines Robotergreifers in Matlab / Simulink