


Wie hat die Technologie die Herstellung von Robotern verändert
Einführung:Warnung:Dadurch fühlen Sie sich möglicherweise ALT
Mein Name ist Steve Spano, mein erstes Elektronikprojekt bestand darin, eine Batterie, zwei Drähte und eine Taschenlampe miteinander zu verbinden, als ich 4 Jahre alt war. Im Alter von etwa 6 bis 16 Jahren habe ich mir verschiedene Programmiersprachen (Assembler, Basic und sogar C) auf Computern wie dem Texas Instruments TI-994A, Commodore C64, Amiga 2000 und IBM 386 beigebracht. Ich habe auch mehrere Heathkits gebaut elektronische Projekte wie das „Solid State“-Funkempfänger-Kit. Wie viele von euch haben schon von Heathkit gehört?

Ich wollte unbedingt den Heathkit HERO 1 Roboter, er war mit seiner Ultraschall-Objekterkennung, dem beweglichen Arm und der 8-Bit-Zentraleinheit erstaunlich ausgeklügelt. Es wurde sogar mit einer Funkfernbedienungstastatur geliefert, sodass Sie es direkt in Hexadezimalmontage programmieren konnten! Könnten Sie sich vorstellen? Programmieren Sie direkt in Hexadezimal mit einer Tastatur und überhaupt keinem Debugger? Der Horror! Erstaunlicherweise wird dieser kleine Roboter bei Ebay immer noch für 1500 US-Dollar verkauft. Ich sollte mir eins kaufen – ich wollte schon immer eins – und es ist so süß!

Viele Jahre lang, vor dem Internet, wenn Sie sich eine solche Zeit vorstellen können, betrieb ich sogar einen „BBS“-Dienst auf einem 9600-Baud-Modem namens „Inter-Dimension“, wo wir Nachrichten und Commodore/Amiga-SoŌware tauschten. Mein damaliger Computertraum war es, 2000 Dollar zu sparen (ein unglaublich großer Geldbetrag im Jahr 1995 für einen 16-Jährigen), um eine 10-Megabyte-Festplatte für meinen Amiga 2000 zu kaufen. Wenn ich diese Festplatte hätte haben können, Ich hätte das beste modembasierte BBS gehabt!
Ich bin in Scranton, Pennsylvania (USA) aufgewachsen, habe Elektrotechnik studiert (University of Scranton) und einen Master-Abschluss in EE mit Schwerpunkt Steuerungssysteme an der State University of New York erworben. Mein erster Job als EE-Job nach der Schule war das Entwerfen von Hardware für Thermodrucker, die in Registrierkassen und Einzelhandelsanwendungen verwendet werden. Das Hauptprojekt bei meinem ersten EE-Job im Jahr 1998 bestand darin, dabei zu helfen, die Produkte des Unternehmens von ihrer 8-Bit-Intel-CPU auf einen brandneuen 32-Bit-50-MHz-Prozessor mit einem 16-Bit-Speicherbus zu aktualisieren. Es war ein großes Projekt, an dem Software-, Hardware- und Maschinenbauteams beteiligt waren. Mein zweiter EE-Job war die Arbeit für ein Unternehmen, das Storage Area Network-Systeme entwickelte. Das war im Jahr 2001, und das große Projekt für dieses Unternehmen bestand darin, bei der Entwicklung einer Reihe von SAN-Systemen mitzuwirken, die die brandneue 2-Gbit/s-Fibre-Channel-Schnittstelle unterstützen. Das war wirklich schnell, 2 Gbit/s auf Glasfaser im Jahr 2001! Wie könnte die Technologie besser werden?
Seniorenprojekt 1997
Ich habe von der ElectronicsLovers-Seite erfahren auf Instagram und die Administratoren suchten nach „Senior Project“-Papieren, um sie auf ihrer Seite hervorzuheben. Es wurde kein Datum angegeben, also dachte ich, ich würde meine College-Abschlussarbeit von 1997 einreichen, hauptsächlich als lustige Erinnerung daran, wie sich die Technologie verändert hat.
Als ich 1997 meinen BSEE-Abschluss an der University of Scranton abschloss, bestand unser Projekt im Abschlussjahr darin, einen autonomen Roboter zu entwerfen, der durch ein Labyrinth navigieren kann. Ich dachte sofort an das Heathkit HERO1; Jetzt könnte ich versuchen, einen in der Schule und einen viel fortschrittlicheren Roboter zu bauen. Schließlich basierte das Heathkit HERO1 nur auf einer Motorola 6808 8-Bit-CPU mit 4 KB RAM (Randleiste:Heutige typische PCI-Express 1G-Netzwerkkarten haben einen Puffer von 64 KB bis 256 KB nur für Paketdaten allein).
Die Designarchitektur für meinen Roboter verwendete einen viel fortschrittlicheren Intel 87x196KC. Dies war eine 16-Bit-CPU, die 32 KB internen EEPROM-Speicher für die Programmspeicherung bereitstellte, aber nur einen gesamten RAM-Speicher von 512 Bytes bereitstellte. Der „C“-Compiler generierte sehr unoptimierten Code, was die Verwaltung des Stapels auf 512 Bytes zu einer erheblichen Herausforderung machte, und es gab überhaupt keinen Echtzeit-JTAG-Debugger oder irgendeine andere Art von Debugger. Die CPU verfügte jedoch über einen internen seriellen/UART, mit dem Sie einfache Zeichenausgaben schreiben konnten, um festzustellen, was der Code tat. Standard-C-Funktionsaufrufe an printf/sprintf wurden auf der CPU nicht einmal unterstützt, weil der RAM-Speicher zu klein war.
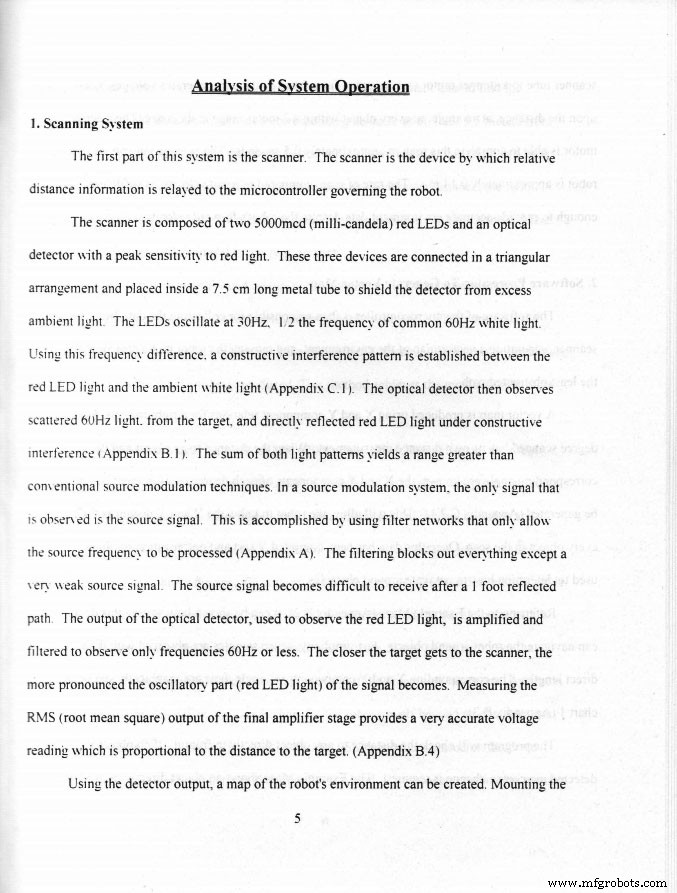
Bei der Entwicklung des Roboters wurden verschiedene Schaltungen wie FET-Treiber zur Motorsteuerung verwendet, um die CPU-Steuerung über eine Reihe von 12-VDC-Motoren zu ermöglichen, sodass sich der Roboter in einem Raum bewegen konnte. Ein grobes „Lidar“-System wurde unter Verwendung einer Laser-LED, eines Spiegels und eines Detektors gebaut. Dies ermöglichte eine einfache „1-Bit“-Ansicht des Raums vor dem abzubildenden Roboter. Ich verwende auch den Begriff „abgebildet“ sehr locker. Eine einfache Karte von „Ein/Aus“ für Hindernisse wurde in etwa 32 Byte Speicher erstellt. Der CPU-Code würde dann versuchen festzustellen, ob sich der Roboter auf eine Lücke oder Wand in dem Labyrinth zubewegt, durch das er zu navigieren versucht. Während des Wettbewerbs konnte der Roboter erfolgreich durch das Labyrinth navigieren. Ich habe sogar eine Arbeit über das Design des Roboters geschrieben und sie gewann 1997 den 2. Platz bei der IEEE Student Paper Competition an der George Washington University. Der Roboter funktionierte und sie ließen mich mit einem Abschluss in Elektrotechnik abschließen.
Senior Year Projects 2018
Ich war vor kurzem als Industrieberater an der University of Scranton, um Ideen für die Kurse zu entwickeln, die darauf basieren, was die Industrie möglicherweise benötigt und welche Fähigkeiten/Technologien für die heutigen technischen Herausforderungen relevant sind. Ich habe einen meiner Professoren nach den Roboterprojekten gefragt und was Studenten jetzt machen.
Die University of Scranton veranstaltet immer noch jedes Jahr einen Roboterwettbewerb für ihre Ingenieurstudenten, aber es ist jetzt ein regionaler und nationaler Wettbewerb. Die Roboter, die die Schüler entwerfen, sind hundertmal komplexer. Die aktuellen Roboter verwenden Arm9/Arm11-CPUs wie den Raspberry PI. Die Studenten schreiben „C“-Code, der unter Linux läuft, um direkt mit USB-HD-Kameras verbunden zu werden, was eine tatsächliche Vorstellung auf den Robotern ermöglicht. Durch die Kombination von Linux, Raspberry PI und der Fülle von Open-Source-Projekten, die über GIT und Google verfügbar sind, haben die Studenten dann Zugriff auf Bilderkennungs- und Erkennungsalgorithmen. Während der Entwicklung der heutigen Roboterprojekte können die Schüler Open-Source-Algorithmen herunterladen, sie mit Remote-Ethernet-Monitoren debuggen, sodass sie jede Variable sehen und ihren Code zum Debuggen in Einzelschritten ausführen können. Die Schüler verbringen dann mehr Zeit damit, sehr clevere Navigationsalgorithmen zu entwickeln, um zu versuchen, ihrem Roboter im Wettbewerb einen besseren Vorteil zu verschaffen.
Nachdem ich das gehört hatte, antwortete ich sofort „Wie unfair!“. Zu meiner Zeit mussten wir ein ganzes Bild in 32 Byte speichern und einen Stack-Manager manuell codieren, damit unser Code sogar auf den bloßen 512 Byte RAM ausgeführt werden konnte, die uns zur Verfügung gestellt wurden. Natürlich ist der Raspberry PI noch nicht einmal der „Höhepunkt“ der heutigen Technologie – aber er ist Lichtjahre höher als alles, was 1997 verfügbar war. Nicht nur die Hardware ist anspruchsvoller, auch die Debugging- und Entwicklungsumgebungen ermöglichen es den Studenten, sich auf das Design zu konzentrieren anstatt mit Gedächtnisproblemen zu kämpfen. Einige Dinge bleiben jedoch gleich. Der Roboter muss sich noch bewegen. Obwohl die Schüler Zugriff auf einige High-End-CPUs haben, müssen sie immer noch einen 3,3-V-Anschluss an einem Prozess erhalten, um einen 12-VDC-Motor ein-/auszuschalten. Dies bringt die Schüler zurück zum Schaltungsdesign für Transistoren und FETs, sie lernen, wie diese grundlegenden Komponenten funktionieren und ihre Roboter bewegen können.
Ich lächelte und sagte, dass die Grundlagen immer noch gelten, und die Studenten erkennen das an. Anspruchsvolle Elektronik verlässt sich immer noch auf die grundlegende Funktionsweise einzelner Transistoren; vielleicht einer auf der Außenseite einer CPU, der einen Motor antreibt, oder 5 Billionen davon auf der Innenseite einer CPU, um ein Bild und einen Navigationscode zu verarbeiten.
http://news.scranton.edu/articles/2017/ 03/FIRST-Robot-Comp-2017.shtml
Also, was kommt als nächstes?
Mein 3. „Job“ – den ich heute noch habe – ist die Führung meines eigenen Elektronik- und Software-Beratungsunternehmens. Ich habe 2001 ein Beratungsunternehmen gegründet und es war definitiv voller Arbeit und unerwarteter Aktivitäten. Ich habe über ein Dutzend Leute direkt eingestellt und wir haben an Hardware- und Softwareprojekten gearbeitet, die von Netzteildesign, Druckertreiber, Bildverarbeitung, Netzwerkgeräten, Festplatten und Kryptografie reichten. Für mich persönlich plane ich, mich mehr auf meinen Favoriten zu konzentrieren Technologieelement – Xilinx FPGAs.
Moderne FPGA-Geräte wie die Kintex/Atrix-Serie vereinen die besten Teile der Hardware- und Softwareentwicklung; rekonfigurierbare Hardware, rekonfigurierbare Software und gleichzeitiges Debugging. Ein besonderes Projekt, an dem ich damals gearbeitet habe, war ein Massenspektrometer. Bei diesem speziellen Design gab es viele Einschränkungen hinsichtlich Geschwindigkeit und Datenerfassung. Ein Teil des Fixes war „einfach einen weiteren Prozessorkern hinzufügen“. Fast wie von Zauberhand ein Single-Core-Gerät, da ein Dual-Core-Gerät die Aufteilung von Verwaltungsaufgaben und zeitkritischen Funktionen ermöglicht. Die Fähigkeit, ein physisches Gerät wie ein FPGA mit zusätzlichen Prozessorkernen neu zu konfigurieren, wäre 1997 schwer vorstellbar gewesen. Moderne FPGA-Geräte ermöglichen Ihnen dies jetzt jederzeit.
Ich plane, später in diesem Jahr an die University of Scranton zurückzukehren, um mit einigen Studenten über aktuelle FPGA-Projekte zu sprechen. Ich werde mich bei meiner Arbeit mehr auf sie konzentrieren; Vielleicht kann ich in Zukunft neue Ingenieure betreuen, wenn sie den ersten Job ihrer neuen Karriere beginnen. P.S. Eine „Punktzahl“ sind 20 Jahre. Das musste ich nochmal nachschauen. Ich bin Ingenieur, kein Englischmajor.
Anhang A – Auszüge aus My Robot Paper oder
„How Times Have Changed“
Dieser Artikel wurde von Herrn Spano verfasst, er ist Teil unseres Teams. Bitte klicken Sie hier, wenn Sie seine Biografie lesen möchten.
Industrietechnik
- Wie wurde Vanadium entdeckt?
- Wie sichert man die Cloud-Technologie?
- So erstellen Sie eine Arduino+Raspberry Pi-Roboterplattform
- Wie die moderne Technologie das Schnitzen von Ostereiern verändert hat?
- 'Künstlerischer' Roboter bei NPE
- 9 Gesetze der Technologie, die die Welt verändert haben
- Wie CNC-Maschinen die Fertigung verändert haben
- Wie Logistikdienstleister in Technologie investieren sollten
- Wie ein CNC-Fräser unser Leben verändert hat?
- Michael Loggins