


Swiper - Auto Tinder/Bumble Swiper
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Hintergrundgeschichte
Meine Freunde machten mir einen Tinder und wie die meisten Leute in der App war ich schnell enttäuscht, wie eintönig es war. Dann wurde mir klar, dass ich ein viel besserer Ingenieur als ein potenzieller Kumpel war, also habe ich das aus einem billigen Schrittmotor zusammengebaut, den ich herumgelegt hatte. Jetzt kannst du damit also auch über 800 Swipes pro Stunde auf Bumble oder Tinder erzielen!
Kurzübersicht:
Es gibt drei schnelle Schritte für diesen Build:Drucken der Teile, Verdrahten + Testen des Schrittmotors und Zusammenbauen.
Schritt 1:Drucken der Teile
Unter https://www.thingiverse.com/thing:2849598 finden Sie die 3D-druckbaren Dateien. Das Wichtigste bei diesen Dateien ist, dass ich 50% Füllung verwendet habe, um die Basis zu erstellen, um die Basis zu beschweren, damit sie sich beim Wischen nicht bewegt.
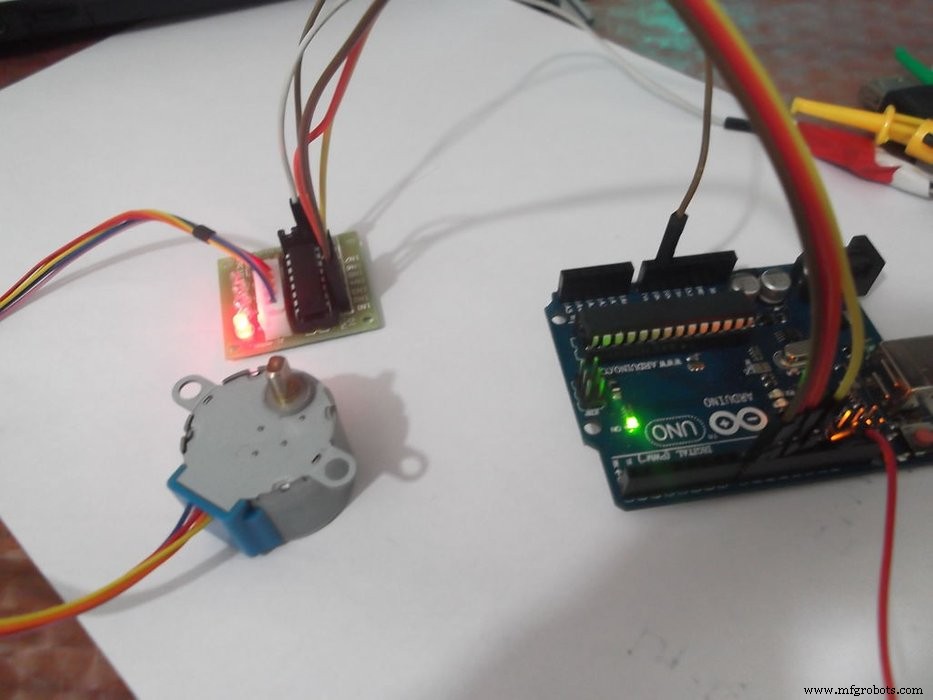
Schritt 2:Der Schrittmotor
Ich habe einen unipolaren 28-BYJ48-Schrittmotor und einen SBT0811-Schrittmotortreiber verwendet. Jeder Schrittmotortreiber, der mit dem 28-BYJ48 funktioniert, sollte in Ordnung sein. Stellen Sie einfach sicher, dass Sie ihn gemäß dem folgenden Setup mit Ihrem Arduino Uno verbinden, oder ändern Sie den Code, um Ihre Änderungen widerzuspiegeln:
- IN1>> D8
- IN2>> D9
- IN3>> D10
- IN4>> D11
- VCC>> 5V
- Gnd>> Boden
Der Code für das Arduino Uno befindet sich am Ende der Seite. An dieser Stelle sollten Sie in der Lage sein, den Code einfach auf Ihren Arduino hochzuladen und einen im Uhrzeigersinn drehenden Schrittmotor zu haben! Wenn Sie die Drehrichtung gegen den Uhrzeigersinn ändern möchten, ändern Sie einfach die Richtung Variable auf falsch

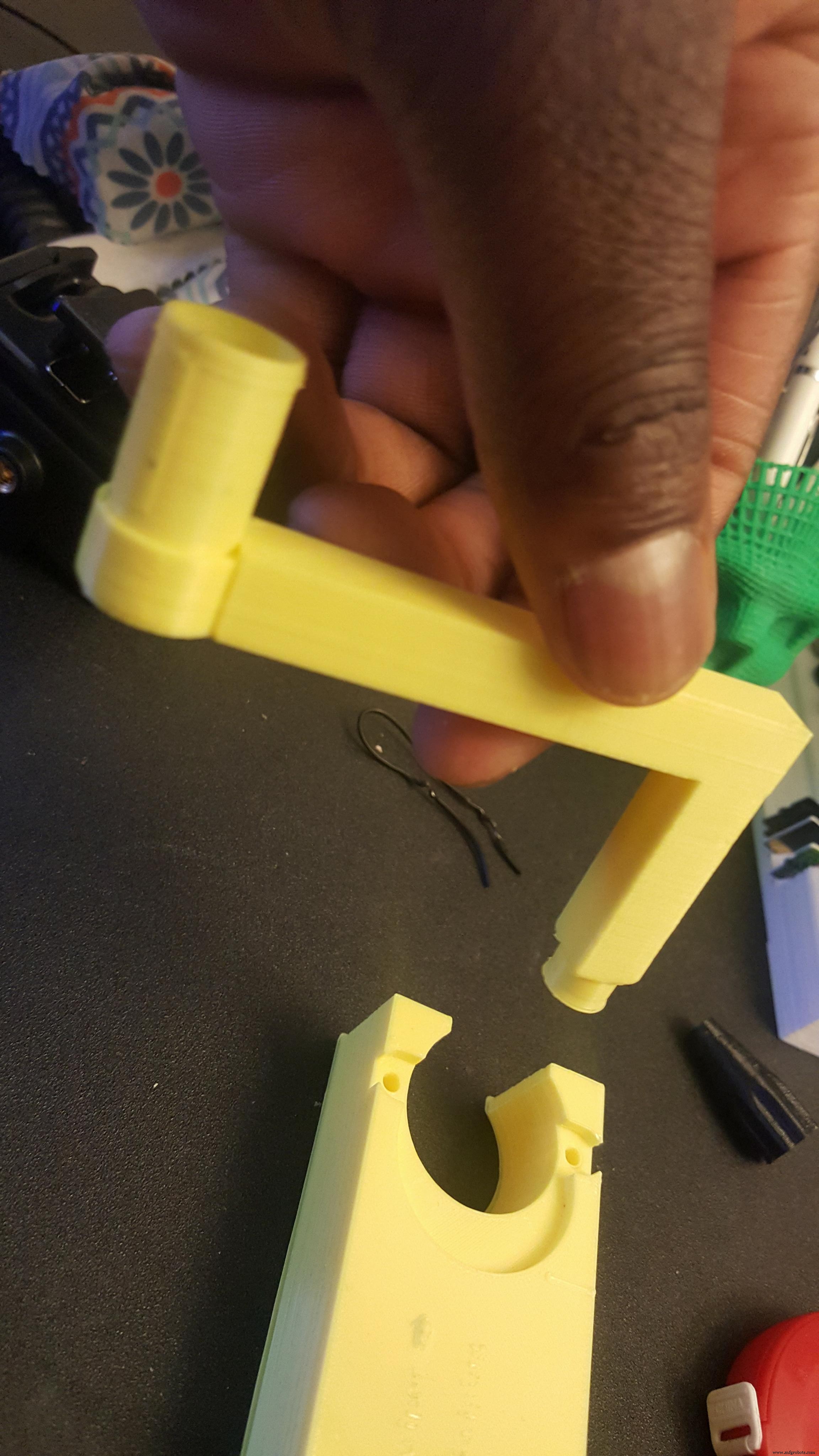
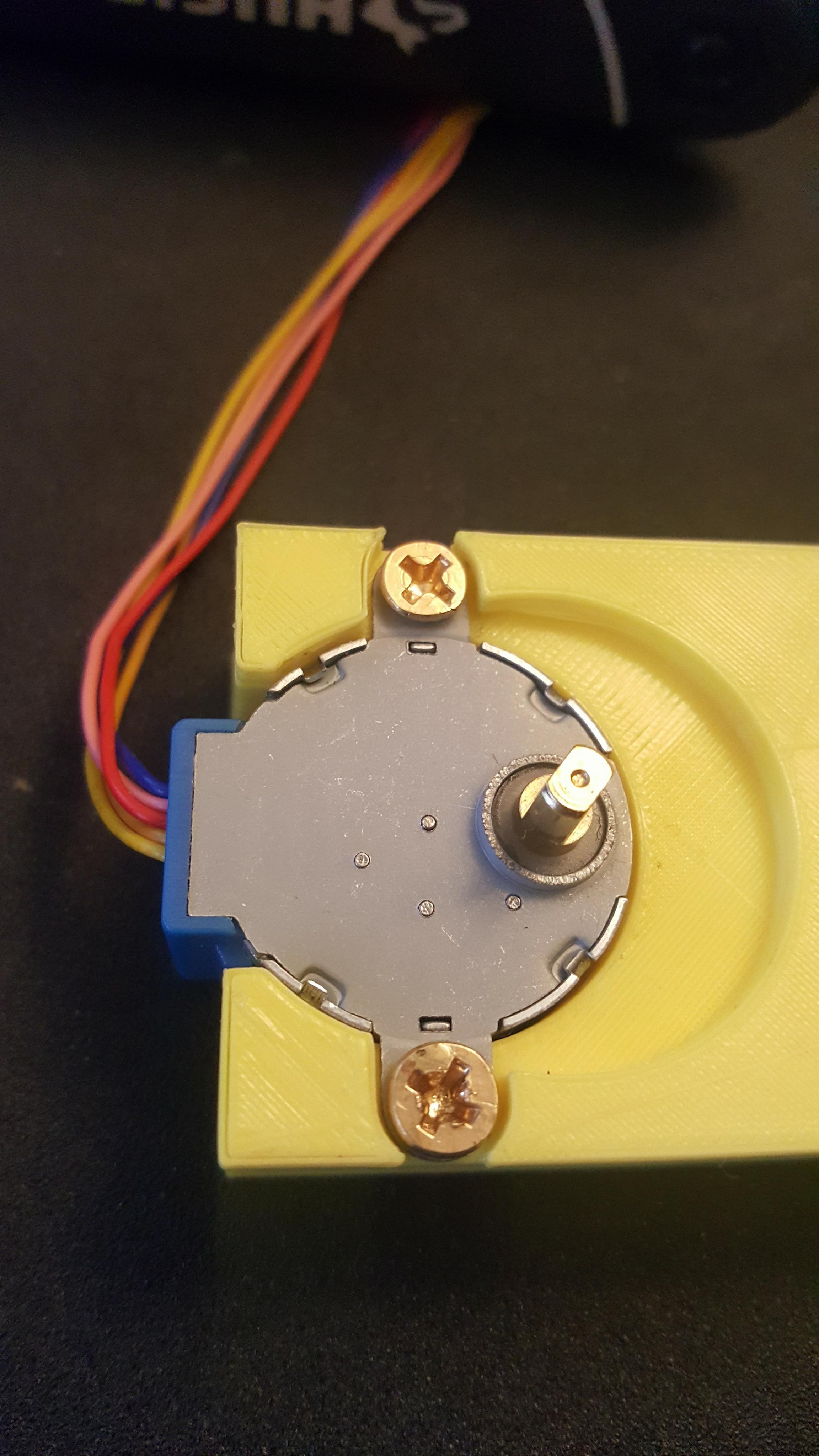
Schritt 3:Alles zusammensetzen
An dieser Stelle haben Sie alle Einzelteile bereit und wir müssen sie nur noch kombinieren! Fahren Sie fort und platzieren Sie zuerst Ihren Schrittmotor in der Swiper-Basis. Ich habe zwei kleine Holzschrauben verwendet, um es im 3D-Druck zu befestigen.
Danach fahren Sie fort und setzen den Swiper-Griff auf den Schrittmotor.
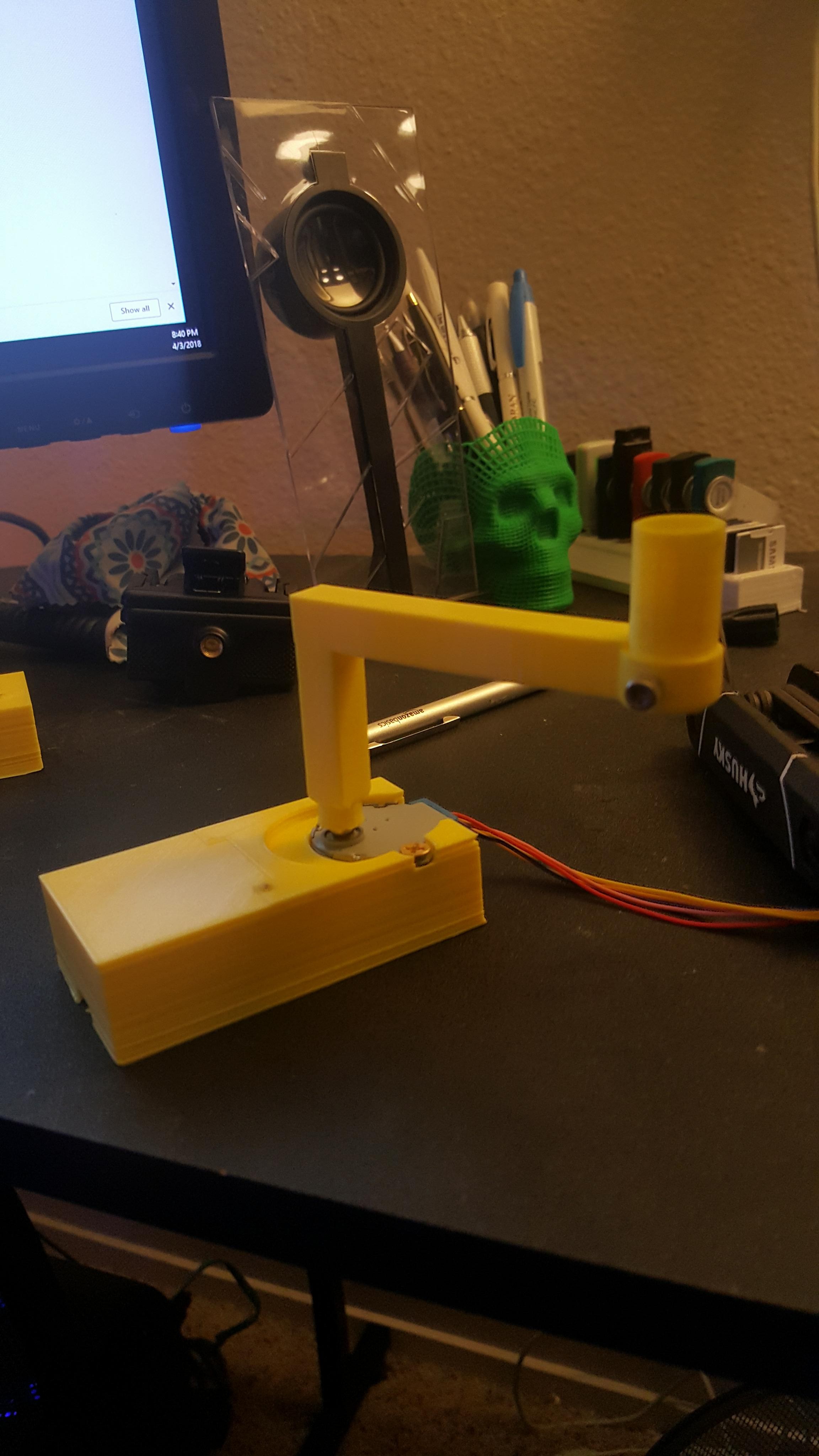
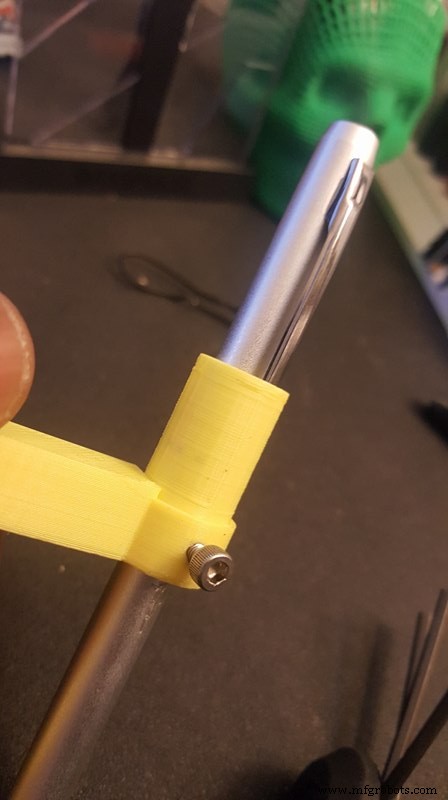
Um die Höhe zu kalibrieren; Platzieren Sie die gesamte Struktur über einem Telefon und stecken Sie den Touchscreen-Stift in den Swiper-Griff, bis der Touchscreen-Stift den Bildschirm berührt.

Nehmen Sie an dieser Stelle eine kurze M3-Schraube und sichern Sie Ihren Touchscreen-Stift, damit er sich beim Wischen nicht bewegt.
Endlich wischen
Platzieren Sie die gesamte Struktur neben dem Telefon, öffnen Sie die gewünschte Dating-App, drehen Sie die Arduino-App und lehnen Sie sich zurück!
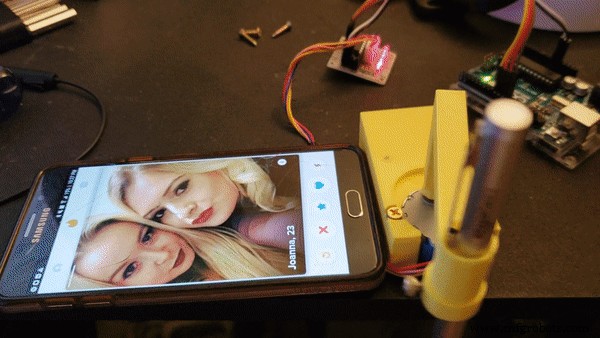
Ich habe dies auf 4 verschiedenen Telefonen getestet und eines der Telefone hatte Probleme beim korrekten Registrieren der Wischvorgänge und ging zum vorherigen Bildschirm. Dies liegt daran, dass der Rand des zuletzt getesteten Telefons ziemlich empfindlich war. Sie können dies beheben, indem Sie Ihr Telefon in eine Hülle mit einem erhöhten Rand legen, damit der Touchscreen-Stift nicht am Rand des Bildschirms registriert wird.
Code
- Swipe
SwiperArduino
Richtung ändern =false auf true, wenn Sie die Wischrichtung ändern möchten!/* BYJ48 Schrittmotorcode Verbinden:IN1>> D8 IN2>> D9 IN3>> D10 IN4>> D11 VCC>> 5V Gnd geschrieben von:Mohannad Rawashdeh https://www.instructables.com/member/Mohannad+Rawashdeh/ 28.09.2013 */#define IN1 8#define IN2 9#define IN3 10#define IN4 11int Steps =0;boolean Direction =false; // auf true ändern für Swipe nach rechtsunsigned long last_time;unsigned long currentMillis;int steps_left=4095;long time;void setup(){Serial.begin(115200);pinMode(IN1, OUTPUT); PinMode (IN2, OUTPUT); PinMode (IN3, AUSGANG); PinMode (IN4, AUSGANG); // delay (1000);}void loop () { while (steps_left> 0) { currentMillis =micros (); if(currentMillis-last_time>=1000){stepper(1); time=time+micros()-last_time; last_time=micros(); Schritte_links--; } } steps_left =4095;}void stepper (int xw) { for (int x =0; x 7){Schritte=0;}if(Schritte<0){Schritte=7; }} Herstellungsprozess