


Roboterauto mit G-Sensor-Smartphone gesteuert
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||

Schritt 1. Bauen Sie ein Roboterauto mit einer beliebigen verfügbaren Plattform auf Zweirad-Schaltung. Das Anschlussdiagramm der elektronischen Komponenten ist in der folgenden Abbildung dargestellt. Sie benötigen ein Arduino UNO oder ein kompatibles Board, ein Bluetooth HC-05(06)-Modul, einen Motortreiber und eine Stromversorgungsbatterie. Getriebemotoren werden auf der Plattform platziert und zwingen die Roboterräder zu bewegen. 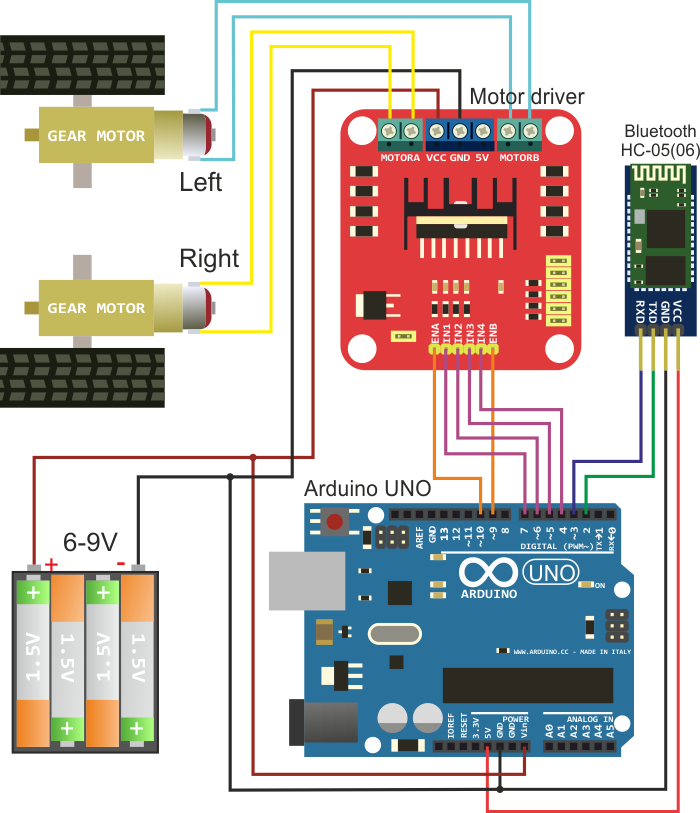 Schritt 2. Rufen Sie die RemoteXY-Service-Website unter http://remotexy.com/en/editor/ auf und erstellen Sie eine grafische Benutzeroberfläche zur Steuerung des Roboters. Stellen Sie eine Steuerfunktion mit dem G-Sensor für den Joystick ein. Ein Beispiel für eine Schnittstelle finden Sie in der folgenden Abbildung. Klicken Sie auf die Schaltfläche "Quellcode abrufen". 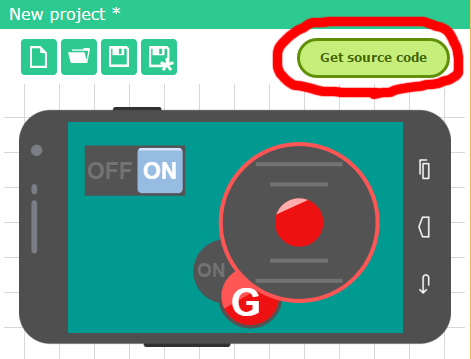
Schritt 3. Laden Sie den Quellcode der GUI herunter und öffnen Sie ihn in der Arduino IDE. Zum Kompilieren benötigen Sie die Bibliothek RemoteXY.h; die Bibliothek kann unter dem Link http://remotexy.com/en/library/ heruntergeladen werden. Sie können bereits versuchen, Code in Arduino zu laden und eine Verbindung mit der mobilen Anwendung herzustellen. Aber obwohl dies nur der leere Code ist, müssen Sie die erforderliche Funktionalität hinzufügen, um eine grafische Benutzeroberfläche und einen Motortreiber zu verknüpfen.
Schritt 4. Dann müssen Sie dem Quellcode mithilfe einer grafischen Schnittstelle Robotersteuerungsfunktionen hinzufügen. Zu diesem Zweck zeigt das Feld RemoteXY-Struktur.RemoteXY-Struktur alle Ihre GUI-Steuerelemente an. Der resultierende Quellcode ist unten gezeigt. Sie können es kompilieren und auf Arduino hochladen.
Schritt 5. Installieren Sie eine mobile Anwendung RemoteXY auf http://remotexy.com/en/download/. Wenn die Anwendung auf einem Mobilgerät ausgeführt wird, drücken Sie in der Liste die Bluetooth-Taste Verbindung, wählen Sie den Namen Ihres Bluetooth-Moduls aus, für HC-05 (06)-Module lautet der Name normalerweise INVOR oder HC-06. Es funktioniert!
Code
Roboterauto mit Fernbedienung über die mobile RemoteXY-AppC/C++Sie können die RemoteXY.h-Bibliothek über den Link http://remotexy.com/en/library////////////////////////// herunterladen. //////////////////// // RemoteXY Include-Bibliothek // /////////////////////// ////////////////////// /* RemoteXY Verbindungsmodus auswählen und Bibliothek einschließen */ #define REMOTEXY_MODE__SOFTWARESERIAL #include Schaltpläne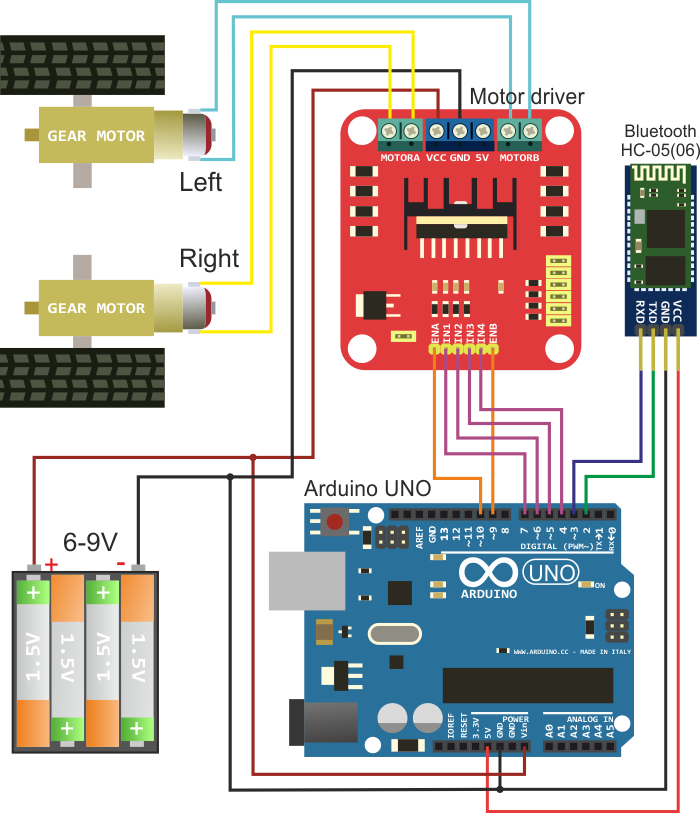 Herstellungsprozess
|