


Wie erreicht ein Roboter volle Autonomie?
Wenn die meisten Menschen an vollautonome Roboter denken, machen sie sich Sorgen über fantasievolle KI-Szenarien, die wenig Grundlage in den realen Fakten – und Geheimnissen – haben, die wir über das Bewusstsein kennen. Während man sich darauf fixiert, wird es für die Menschen schwieriger, den praktischen Wert von Robotern zu erkennen, die unabhängig und ohne wesentliche Aufsicht funktionieren können, wenn es eine Vielzahl von Jobs, Prozessen und Branchen gibt, die viel mehr dazu beitragen, sowohl ihre Rentabilität als auch ihre positive Wirkung zu verbessern.
Gleichzeitig ist die Roboterautonomie einigen außer Kontrolle geratenen Definitionen – und Erwartungen – zum Opfer gefallen, die nicht unbedingt hilfreich sind, um zu verstehen, was ein Roboter braucht, um autonom zu werden und wo Autonomie kann am schnellsten erreicht werden.
Damit ein Roboter seine volle Autonomie erreichen kann, müssen mehrere Kriterien erfüllt sein:
- Der Roboter muss in der Lage sein, selbst aussagekräftige Informationen über seine Umgebung zu gewinnen
- Der Roboter muss diese Informationen strukturiert und nutzbar verarbeiten können
- Der Roboter muss in der Lage sein, seine Aktionen als Reaktion auf diese Informationen zu planen
- Der Roboter muss in der Lage sein, den von ihm erstellten Plan zeitnah auszuführen
Unter all diesen Umständen ist es wichtig, ein paar weitere Dinge zu verstehen in Bezug auf die Struktur dieser Parameter:
- Ein Roboter muss ein Ziel haben. Während wir menschliche Autonomie traditionell mit der Fähigkeit verbinden, sich eigene Ziele zu setzen, gibt es keinen erwarteten Parameter, innerhalb dessen sich die Roboter von heute ihrer selbst bewusst werden.
- Die Autonomie eines Roboters muss anwendungsspezifisch sein. Ein vollautonomes Auto kann auf verschiedenen Ebenen funktionieren – einige auf der Autobahn, andere in jedem Gelände. Abhängig von den Umständen können beide das gleiche Maß an Autonomie ausüben.
- Das Design funktioniert am besten, wenn es den Bedarf an menschlichem Input minimiert – während bestimmte autonome „Cobot“-Anwendungen dazu beitragen können, die Produktivität zu optimieren oder ein gewünschtes Ziel zu erreichen, wäre Autonomie in den meisten Fällen kein angemessenes Qualifikationsmerkmal, wenn direktes menschliches Engagement Wird benötigt.
Wie kommen wir also von Punkt A nach B? Wie wird ein traditioneller „programmierbarer“ Roboter vollständig autonom? Nun, hier beginnt der Spaß!
Informationen über die Umwelt gewinnen
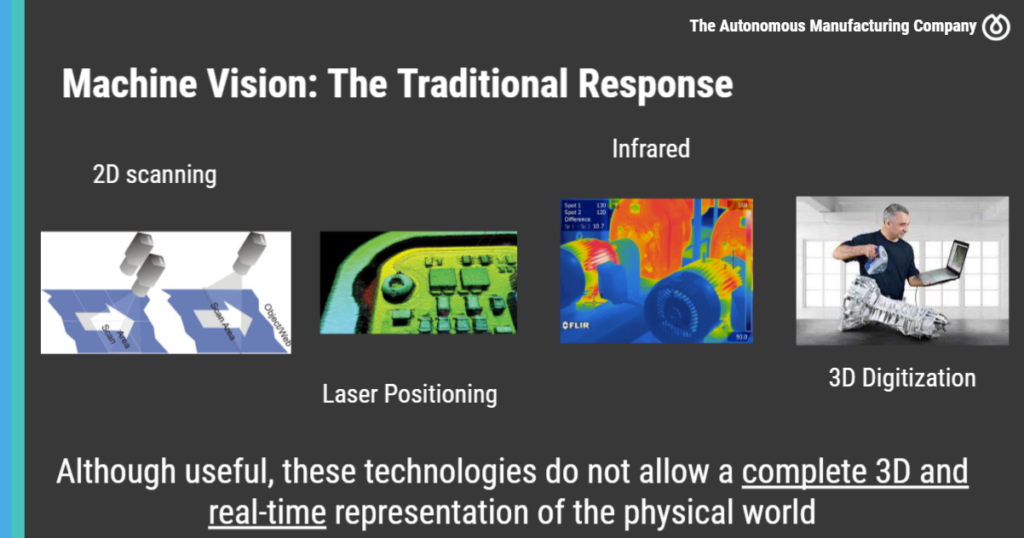
Es gibt eine breite Palette von Lösungen, um einen Roboter wissen zu lassen, was um ihn herum passiert. Lidar, Radar, Sonar, taktile Sensoren, alle Arten von Vision-Systemen, eine endlose Anzahl verschiedener Kommunikationsmechanismen von extrarobotischen Sensoren, Kameras oder lokalen Informationssystemen, die Audio- oder Video-Natur sein können. All dies ist lediglich ein Versuch, Robotern die gleichen Sinne zu geben, die ein Mensch hat, und sind seit langem Standard in Bereichen wie der automatischen Maschinensteuerung für hochspezialisierte Automatisierungsprozesse.
Es ist wichtig zu bedenken, dass die Wahrnehmung hier nicht die einzige Einschränkung ist. In industriellen Systemen, die heute IoT (Internet of Things)-fähig – oder zumindest vernetzt – sind, können beispielsweise unterschiedliche Prozess- und speicherprogrammierbare Steuerungen in unterschiedlichen Strängen miteinander verbunden werden, um unterschiedliche Prozesse auszuführen. Was jedoch von dort aus getan werden kann, besteht darin, diese Informationen in Roboterprozesse zu integrieren, um die Position, Ausrichtung und erforderliche Manipulation an einem Objekt zu verstehen.
Außerhalb industrieller Umstände können dieselben Modelle angewendet werden, sie müssen jedoch mit den richtigen Arten von verbundenen Informationen kontextualisiert werden. Wenn beispielsweise jemand einen Roboter für die medizinische oder die Altenpflege entwickeln möchte, können externe Sensorfunktionen nützlich sein, um die Gesundheit eines Patienten zu verwalten, aber ohne angemessene Sicherheit und Anonymisierung könnten sie auch Datenschutz- oder Behördenrisiken bergen, wenn es darum geht, wer behandelt wird betreut und von welchem Roboter unter welchen Umständen.
Genauso wird 5G als eine große Chance gesehen, zwischen zukünftigen selbstfahrenden Autos zu koordinieren und Effizienz bei der Automatisierung aller Aspekte des Fahrens und Transports zu erzielen – und das alles bei gleichzeitiger Optimierung um Dinge wie Straßenbedingungen, Engpässe, blockierte Straßen und mehr zu optimieren. Obwohl dies sehr leistungsstarke Anwendungen sind, muss die Art und Weise, wie Informationen an einen Roboter übertragen werden, vorsichtig gehandhabt werden. Mit großer Macht kommt schließlich auch große Verantwortung.
Strukturierte Verarbeitung der Informationen
Wie soll man Informationen sinnvoll verdauen? Wenn wir daran denken, wie wir dies als Menschen tun, ist dies unsere zweite Natur oder oft instinktiv in Bezug auf unsere Entscheidungen. Was wir oft nicht erkennen, ist, dass so viele unserer Entscheidungen auf evolutionär, sozial oder verhaltensmäßig erworbenen Merkmalen – sowie Eigenschaften unserer Persönlichkeit – basieren, die unsere Arbeitsweise manchmal deterministisch erscheinen lassen, wenn auch nicht ohne Überraschungen oder Spaß!
Bei Robotern mögen wir jedoch keine Überraschungen! Glückliche Überraschungen, sicher – Dinge wie herauszufinden, dass ein Roboter besser oder effizienter ist, als wir uns erhoffen, sind großartig, aber wenn wir alle möglichen Funktionen eines autonomen Roboters antizipieren müssen – sei es in der Lieferung, beim Transport, in der Pflege , Materialhandhabung, Inspektion, vorausschauende Wartung, industrielle Prozesse oder einfach ein Roboterhund, der Backflips macht – unsere Erwartungen zu erfüllen ist weitaus besser als ein „Funktionsausfall“.
Aus diesem Grund ist es wichtig zu wissen, dass die Entwicklung eines autonomen Roboters selten bedeutet, dass die Dinge sofort einsatzbereit sind. Während einige Unternehmen und Wissenschaftler daran arbeiten, die grundlegenden Erfassungs- und Verarbeitungsmodelle autonomer Roboter zu vereinfachen, müssen diese Modelle letztendlich zu Prozessmodellen beitragen, die die Fähigkeit eines Roboters vereinfachen, Informationen auf umsetzbare Weise zu verwenden.
Aktionen anhand von Daten planen
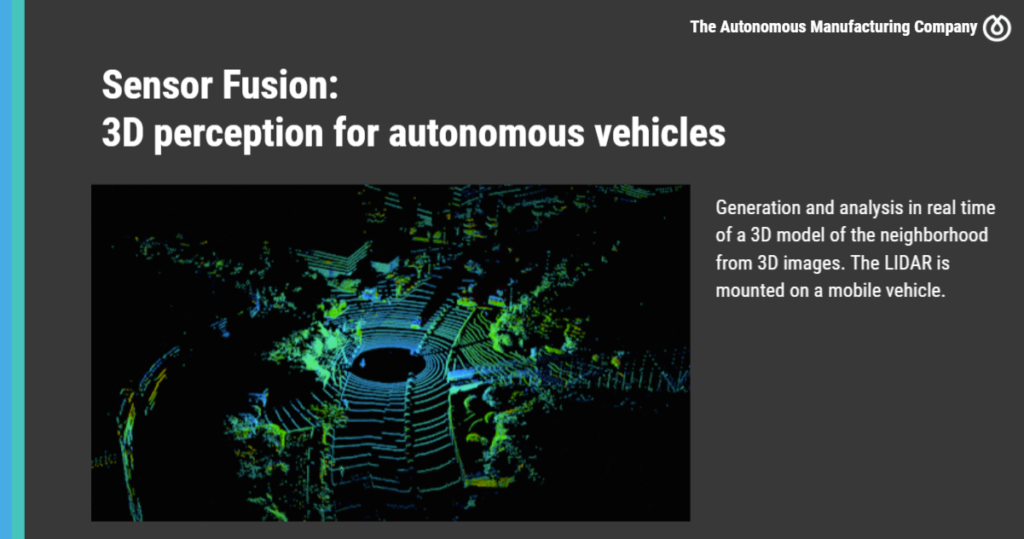
Die von den Sensormechanismen eines Roboters erzeugten Daten können auf verschiedene Weise verarbeitet werden. Letztendlich besteht für visuelle 3D-Daten der einfachste Weg darin, die Daten einer Form zu einem ganzen Objekt aufzuschlüsseln und wieder zu integrieren. Dies ist ein paralleler Prozess, der eine Anhäufung vieler kleiner Operationen erfordert – während das menschliche Gehirn auf diese Weise sehr flexibel funktioniert, erfordert die Generierung zuverlässiger Modelle für diese Art der Verarbeitung erhebliche Wiederholungen und Validierungen.
Der nützlichste Aspekt dieses Prozesses ist die Eingabe von Daten in ein Gesamtprozessmodell für alles, was der Roboter tun muss. Etwas heben und tragen? Post in einen Briefkasten werfen? Etwas lackieren oder zusammenschweißen? Jede dieser Aktionen erfordert ein ganzheitliches Verständnis von Art, Ort, Position und nicht konformen Ergebnissen eines Ziels (z. B. die Post geht in den Karton, aber es gibt ein Loch im Boden und sie fällt in einen Busch).
Gleichzeitig müssen in Ergänzung dieses Mail-Beispiels Fallback-Ziele festgelegt werden, um automatisiert zu einem noch akzeptablen Ergebnis zu kommen, ohne die Hauptprioritäten der autonomen Funktion des Roboters zu überfordern. Einfacher:Autonome Roboter müssen improvisieren können, aber die Planung dieser Improvisation erfordert viel Arbeit.
Wie Mark Twain einmal sagte:„Normalerweise brauche ich mehr als drei Wochen, um eine gute improvisierte Rede vorzubereiten.“ Dies ist nicht einfach nur ein Bonmot, sondern sehr lehrreich, wie Menschen funktionieren. Auch wenn wir uns oft auf die anstehenden Aufgaben konzentrieren, haben wir eine ausgeklügelte Reihe unbewusster Gewohnheiten mit zusätzlichen Talenten wie der „Propriorezeption“, die nicht gut erkannt werden.
Dies sind jedoch perfekte Fähigkeiten für einen Roboter, der alles tun muss, vom Schwingen von Bäumen bis zur Jagd in der Savanne und vielleicht später das Rad erfinden und ein wenig feuern. Es hat Millionen von Jahren gedauert, diese Fähigkeiten zu entwickeln. Seien Sie also nicht überrascht, dass es mehr als einen Nachmittag dauern kann, einen Roboter zum autonomen Funktionieren zu bringen.
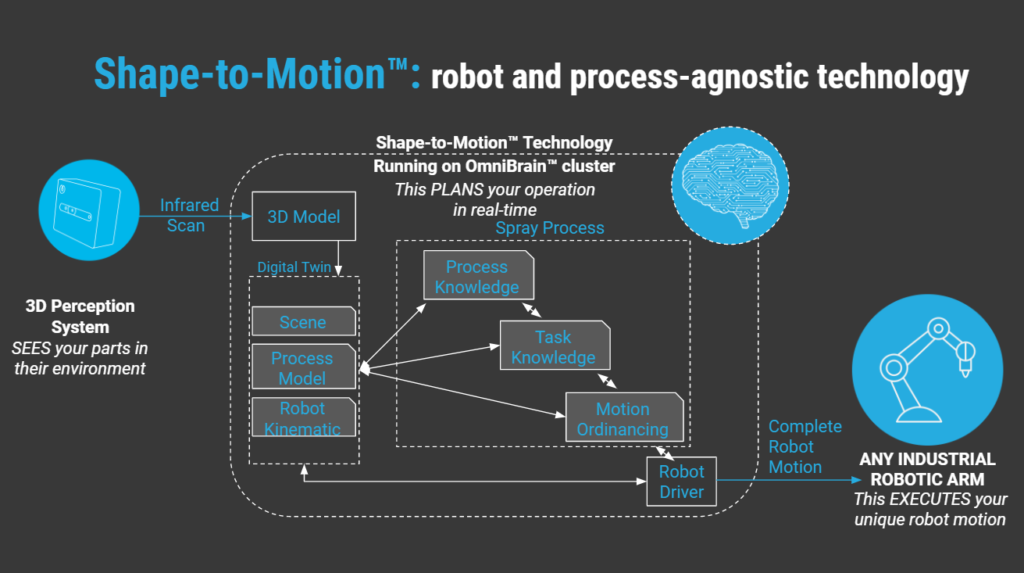
Was also ist in diesem Zusammenhang die Antwort für Roboter? Nun, ähnlich wie Menschen ihre Aktionen visualisieren, bevor sie sie ausführen, Simulationen oder digitale Zwillinge einer autonomen Roboterfunktion generieren und diese verwenden, um sowohl Prozessmodellerwartungen zu injizieren (z größter Schritt, den Sie machen können, um einen nützlichen autonomen Roboter zu schaffen.
Ausführung des Plans
Sobald Sie ein Prozessmodell, genügend Simulationen und die richtig kalibrierten Sensormechanismen haben, ist die Ausführung nur noch eine Frage der Beobachtung und Optimierung. Wenn der autonome Roboter, den Sie bauen, sofort Ihren Standards entspricht, müssen Sie das nicht einmal tun. Der grundlegende Wert von Robotern ist ihre Beständigkeit, und bestehende moderne Industrieroboter sind äußerst zuverlässig. Hinzufügen von Wahrnehmungs- und Intelligenzebenen, um sie ansprechbar zu machen zu verschiedenen Teilen und Positionen schafft diese ganz neue Welt der Autonomie, die wir alle erkunden möchten
Was kommt als nächstes für diese Autonomie? Vereinfachung der Art und Weise, wie Anwendungen erstellt werden, wie oben erwähnt, aber auch die Breite der Sensoren, Roboteranordnungen, Aufgaben, Umgebungen und mehr, die ausgeführt werden können. Das Dumme ist, dass Automatisierung Produktivität schafft, die letztendlich Wachstum, Einkommen und die Nachfrage nach Arbeitskräften steigert. Automatisierung als Bedrohung für die Belegschaft zu sehen, ist die wahre Bedrohung , während mehr Bereiche automatisiert werden, die Mitarbeiter nicht mögen wird Jobs kreativer, innovativer und unterhaltsamer machen als je zuvor – wenn die Leute überhaupt arbeiten müssen. Viel Spaß!

Omnirobotic bietet autonome Robotertechnologie für Spritzprozesse, die es Industrierobotern ermöglicht, Teile zu sehen, ihr eigenes Bewegungsprogramm zu planen und kritische industrielle Beschichtungs- und Veredelungsprozesse auszuführen. Sehen Sie hier, welche Art von Rückzahlung Sie davon erhalten können oder erfahren Sie mehr darüber, wie Sie von . profitieren können Autonome Fertigungssysteme .
Industrieroboter
- Wie Sprühroboter die Konsistenz verbessern
- Wie Lackierroboter Nacharbeiten reduzieren
- Whitepaper:So finden Sie Ihr Roboterpotenzial
- Wie viel kostet Roboterautomatisierung?
- Virtual Solutions Center:Wie hilft Robotersimulation bei der Roboterintegration?
- Materialien zum Bauen eines Roboters:Eine vollständige Liste
- Ultimate Guide:So wählen Sie einen richtigen SCARA-Roboter
- Robotermaschinenpflege:Was es ist und wie es funktioniert
- So reduzieren Sie die Schulungszeit für das Roboterschweißen
- Erste Schritte mit der Yaskawa-Roboterprogrammierung