


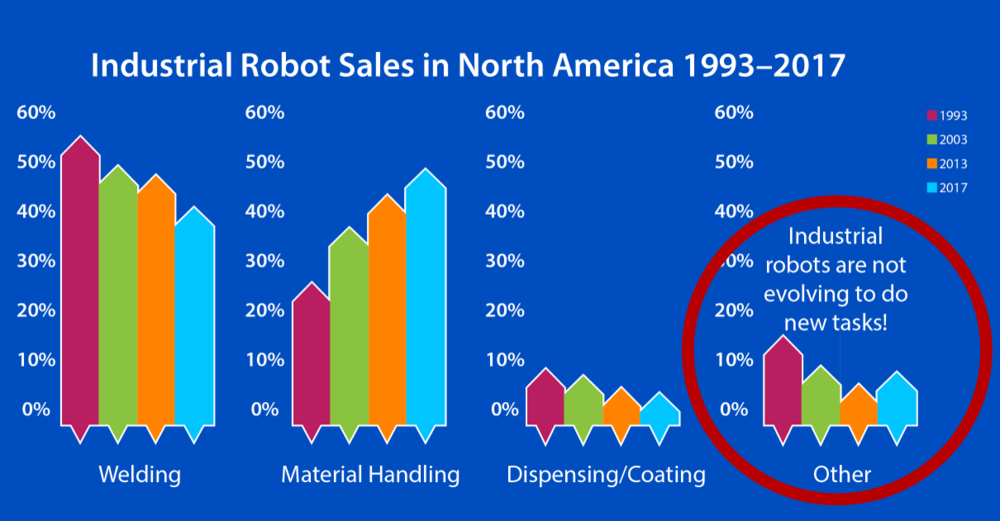
Was hält die Integration von Industrierobotern zurück?
Die Integration von Industrierobotern ist ein hochspezialisierter, höchst kreativer und raffinierter Prozess, während die Menschen, die sie praktizieren, oft der Idee des menschlichen Einfallsreichtums und Einfallsreichtums selbst alle Ehre machen. In vielerlei Hinsicht stellen Robotik-Integratoren eine Gruppe hochspezialisierter, hochqualifizierter Lösungsarchitekten dar, die Herstellern helfen, ihre Produktivität zu steigern.
Leider gab es ein paar Dinge, die die Reichweite und den Umfang hielten der Industrieroboterintegration zurück. Darüber hinaus leiden die bewährten Handwerker – die Robotik-Integratoren unseres Vertrauens – am meisten darunter. Dies liegt nicht nur daran, dass es schwierig ist, Mitarbeiter mit den richtigen Fähigkeiten für die Robotikintegration zu finden, sondern auch daran, dass der Job selbst anspruchsvoll und mühsam sein kann und sich in vielen Fertigungsszenarien nur begrenzt auszahlt.
Was hält sie an der Robotik zurück? Nun, zum einen ist die Programmierung ein so anspruchsvoller Prozess, dass Bemühungen, ihn zu vereinfachen, für viele Integratoren nicht die materielle Wirkung hatten, die sie sollten. Auch wenn die Programmierung einfacher ist, sind Roboter heute nicht so gebaut, dass sie sich an eine große Teilevielfalt oder unstrukturierte Umgebungen anpassen, was sie effektiv von vielen Fabriken fernhält. 3D-Vision, Sensorfusion und eine Vielzahl von Technologien versprechen, Roboter autonomer zu machen, aber die richtigen Fähigkeiten und Software waren noch nicht da, um die Dinge einfach genug zu machen.
Glücklicherweise können die richtigen Lösungen Roboterintegratoren dabei helfen, all diese Probleme endlich auf einmal anzugehen. Wenn sie dies tun, öffnen sie die Türen zu einer Vielzahl von Branchen, Prozessen und Servicemöglichkeiten, die in der Vergangenheit einfach nicht möglich waren.
Das Programmieren einfacher zu machen hat es nicht einfach genug gemacht
Das Konzept der Robotik selbst grenzt im Vergleich zu anderen Praktiken in der modernen Technik noch etwas an das Territorium der Science-Fiction. Wie kann man einen Prozess zuverlässig hundert-, tausend- oder sogar eine Million Mal automatisieren, ohne das Risiko eines Ausfalls, Stillstands oder einer katastrophalen Beeinträchtigung zu riskieren?
Die heute angebotenen Industrieroboter – ob von FANUC, Kuka, ABB, Kawasaki, Universal Robots oder anderen aufstrebenden und Nischenanbietern – erfüllen im Allgemeinen diese Art von Leistungsstandards, wobei natürlich ihre Prozessbeschränkungen und Wartungsanforderungen respektiert werden.
Fortschritte bei den Materialien haben Roboter von jedem dieser hochkarätigen Anbieter leichter, agiler und präziser gemacht, als wir es jemals von menschlichen Arbeitern erwarten würden. Dies hat es ermöglicht, von jedem verschiedene Jerks, Treiberfähigkeiten und mehr zu entwickeln.
In all diesen Fällen wurden wesentliche Entwicklungs- und Konstruktionsentscheidungen getroffen, um die Funktionen und das erforderliche Maß an Benutzerfreundlichkeit zu erreichen. Dieser Prozess ist zwar mühsam, führt aber auch zu einer Divergenz in den Fähigkeiten, der Programmierung und der Eignung verschiedener Roboter für unterschiedliche Operationen. Erfahrene Roboterintegratoren wissen, wie man Modelle verwaltet und in bevorzugten Szenarien arbeitet, aber wenn es um den Mangel an Fähigkeiten und Umgebungen für den Einsatz geht – wo sie sonst wachsen und ihr Geschäft diversifizieren könnten – scheint diese Mischung aus Roboterprogrammierungsanforderungen in der Weg.

Bei diesem Bruch könnte eine vereinheitlichende Middleware von einigen als der Hauptweg angesehen werden, mit dem alle unterschiedlichen Arten und Funktionen von Robotern „harmonisiert“ werden könnten, um die Planung und Programmierung von Roboteroperationen zu vereinfachen.
ROS (oder, kreativ genug, „Robot Operating System“) wurde 2007 veröffentlicht, um dies zu erreichen. ROS hat zumindest ein System bereitgestellt, das für Akademiker bei der Entwicklung und gemeinsamen Nutzung von Roboteranwendungen nützlich war. Leider löste dies letztendlich nicht das Problem, das industrielle Integratoren lösen mussten:die Möglichkeit, viele der Einschränkungen, die mit der Planung, Programmierung und Verarbeitung über verschiedene Teile und räumliche Einschränkungen einhergehen, grundlegend zu überspringen. All dies könnte ihnen stattdessen ermöglichen, mehr Roboter in neue Prozesse und Branchen zu integrieren, zu integrieren und zu verkaufen.
Der Bedarf an begrenzten oder minimalen Stückzahlen
Letztendlich beschleunigt eine Roboter-Middleware die Roboterintegration nicht grundlegend, weil die „Schleife offen bleibt“ – bei jedem Produkt, Prozess und Programm, das ein Roboter übernimmt, muss jeder einzelne Schritt programmiert, getestet und in einem zu 100 % vorhersehbaren Set von Szenarien validiert werden . Dies bedeutet letztendlich, dass die Vorbereitung eines Szenarios, egal wie inkrementell oder unterstützend, die gleiche Zeit in Anspruch nehmen wird wie Ihr wichtigster Roboterprozess. Auch wenn Sie die Programmierung vereinfachen, die ständig wiederholt werden muss, ist dies nicht einfach genug.
Während bestimmte Hersteller von Industrierobotern für einfachere Programmiersprachen und -methoden werben – einschließlich der verstärkten Verwendung von HMIs (Human Machine Interfaces) – muss jeder Prozess bis zu einem gewissen Grad manuell programmiert werden. Dieses von einem Menschen erstellte Programm muss validiert werden. Dies bedeutet, dass letztendlich nur eine begrenzte Zeit im Robotik-Integrationsprozess eingespart werden kann.
Beispielsweise gibt es in Maschinenwerkstätten einen zunehmenden Trend, Roboter mit begrenzter persönlicher Programmierung für einen wiederholbaren Prozess einzusetzen. Dieser Prozess ermöglicht es beispielsweise, einen Lauf von einigen hundert Metallteilen mit einem angemessenen Grad an Genauigkeit schnell zu automatisieren, erfordert aber letztendlich immer noch einen erheblichen Aufwand an menschlichem Aufwand, Aufsicht und Nacharbeit.
Obwohl davon ausgegangen werden kann, dass dies einen Großteil der „Beinarbeit“ erledigt, erhöht es nur ein begrenztes Maß an Produktivität für einen bestimmten Shop und bietet darüber hinaus begrenzte Möglichkeiten für Roboterintegratoren, durch den Verkauf von Dienstleistungen in neue Kundenumgebungen zu wachsen. Gleichzeitig löst es nicht das Problem des Roboterwechsels zwischen Teilen oder in unstrukturierten Umgebungen oder einfach in solchen, die kein umfangreiches Einrichten erfordern.
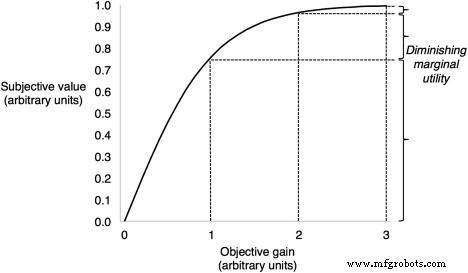
Letztlich fällt diese noch immer dem Gesetz des „Mindernden Grenznutzens“ zum Opfer. Für Massenhersteller ist der Grenznutzen von Robotern relativ hoch. Für Werkstätten ist er heute höher als früher, aber immer noch zu niedrig, um einen zuverlässigen Kundenstamm für Robotik-Integratoren zu bieten. Für High-Mix-Hersteller – solche mit Tausenden von SKUs und die den größten Teil der Fertigungsindustrie ausmachen – ist der Grenznutzen von Robotern so gering, dass, wenn überhaupt, nur wenige Roboter regelmäßig einsetzen.
In diesen Fällen benötigen Roboter die Fähigkeit, auf Teile und Umgebungen so nah wie möglich in „Echtzeit“ zu reagieren. Neue Fortschritte in der 3D-Vision bieten Robotik-Integratoren die Chance, Robotern diese Sinne zu geben und letztendlich ihre Programmierherausforderungen ein für alle Mal zu meistern – wenn Roboter natürlich die Fähigkeit erhalten, sich selbst zu programmieren.
Eingeschränkte Wahrnehmungs- und Sehfähigkeit
Ungefähr zur gleichen Zeit, als ROS in den Kinderschuhen steckte, wurde eine völlig neue Herangehensweise an 3D-Vision entwickelt. Sensor Fusion – ursprünglich entwickelt für virtuelle 3D-Umgebungen wie das, was mit dem Xbox Kinect-System von Microsoft erreicht wurde – ermöglichte ein relativ genaues Rendern von Objekten und Umgebungen auf eine Weise, die ein Computer verstehen konnte.
Ein paar Jahre später wird die Sensorfusion im Schnellvorlauf in selbstfahrende Autos und autonome mobile Roboter integriert, während sie noch mehr Anwendungen in Virtual-Reality-Systemen findet, aus denen sie hervorgegangen sind. Das Konzept – und nicht rein visuelle Sensoren – hat seine Wurzeln im Global Positioning System (GPS), findet aber auch in allem, von der HLK-Überwachung bis hin zu medizinischen Geräten, relative Bedeutung.
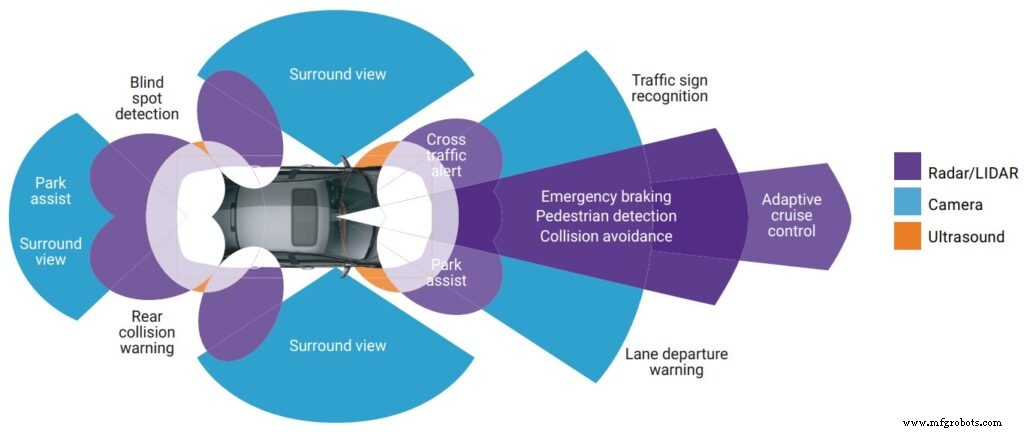
Für industrielle Hersteller steht die Sensorfusion als sinnvolle Anwendung jedoch erst am Anfang. Während viele auf der Industrie 4.0/IoT-Welle reiten und versuchen, Sensoren an mehr Stellen zu integrieren, um Fernüberwachung, Edge-Processing-Anwendungsfälle oder vorausschauende Wartung zu erreichen, ist die Einbindung von Bildverarbeitung und Robotik tatsächlich der beste Weg, um eine gewisse Reaktionsfähigkeit zu erreichen ihre Roboter in industriellen Prozessen. Indem Roboter die Fähigkeit geben, Objekte im Weltraum zu identifizieren und zu verarbeiten, können sie den Robotern ihrer Fabrik dieselbe Autonomie verleihen, die mit selbstfahrender Autotechnologie einhergeht.
Einige dieser Anwendungen existieren heute, jedoch nur für hoch entwickelte Szenarien oder sofort einsatzbereite Sensor-Entwicklungskits, die von großen Industrieroboter- und Peripheriegeräteherstellern stammen. Diese bieten einen guten Ausgangspunkt, um mehr Roboter in High-Mix-Umgebungen zu integrieren, beschränken sich jedoch hauptsächlich auf die Auswahl von Anwendungsfällen und nicht auf Wertschöpfungsprozesse, bei denen Produktionsengpässe am häufigsten vorkommen. Letztendlich bietet ein Roboter, bis ein Roboter die Fähigkeit hat, ein Programm aus dem, was er sieht, selbst zu generieren, nur inkrementelle Verbesserungen in Umgebungen mit hohem Mix.
Erleichterung des Einstiegs in neue Branchen
Als Robotik-Integrator haben Sie möglicherweise nicht wirklich die Zeit, neue Lösungen mit 3D-Vision, Sensorfusion oder neuen und komplexeren Arten von High-Mix-Angeboten zu entwickeln. Viele mögen mit ihrem Geschäft in der Automobilindustrie und ähnlichen Branchen sehr zufrieden sein. Viele mehr werden glücklich sein, langsam in mehr Maschinenhallen und High-Mix-Betriebe einzutreten, in denen die Losgröße groß genug ist, um eine Roboterlösung zu rechtfertigen.
Für Integratoren, die nach einer Möglichkeit suchen, mehr Robotiklösungen in Branchen bereitzustellen, die sie noch nicht kennen, und nicht wissen, wo sie anfangen sollen, kann die Shape-to-Motion™-Technologie von Omnirobotic eine Möglichkeit bieten. Diese Technologie SEHT, PLANT und AUSFÜHRT industrielle Spritzprozesse, indem sie Objekte nach Form – unabhängig von ihrer Position im Raum – mit 3D-Vision identifiziert und dann mithilfe von KI und Prozess-Know-how eine einzigartige Roboterbewegung für jedes bearbeitete Teil generiert. Es kann den Prozess dann mit einem hohen Maß an Verfeinerung, Qualität und erhöhter Produktivität ausführen, indem es mit bestehenden Industrieroboter-Bewegungstreibern arbeitet.
Diese Technologie ermöglicht es Roboterintegratoren letztendlich, die Implementierung in Szenarien mit hohem Mix durchzuführen, sei es in der Luft- und Raumfahrt, bei schweren Geräten, großen Möbeln und Geräten. Dies sind nur einige – aber nicht alle – der Szenarien, in denen Beschichtungsanwendungen von verbesserten und präziseren Robotervorgängen profitieren können und dennoch zu viele Arten von Teilen hatten um die erforderliche Programmierzeit für jede der heutigen manuellen Programmierlösungen zu rechtfertigen.
Omnirobotic bietet selbstprogrammierende Technologie für Roboter, die es ihnen ermöglicht, kritische industrielle Spritz- und Veredelungsprozesse zu sehen, zu planen und auszuführen. Das Team von Omnirobotic kombiniert jahrzehntelange Erfahrung mit neuen KI-Funktionen, um dies durch die sogenannte Shape-to-Motion™-Technologie bereitzustellen, die für jedes Teil und jede spezifische Anforderung einzigartige Roboterbewegungen in Echtzeit erzeugt. Sehen Sie hier, welche Art von Rückzahlung Sie davon erhalten können .
Industrieroboter
- Welche industriellen Lackierroboter funktionieren am besten?
- Industrieroboter
- Knickgelenkte Roboter:Leitfaden für den bekanntesten Industrieroboter
- Typen von Industrierobotern und ihre unterschiedlichen Anwendungen
- Die 12 wichtigsten Anwendungen und Verwendungen von Industrierobotern
- Vorbeugende Wartung für Industrieroboter
- 6 Schritte zu einer erfolgreichen Integration von Industrierobotern in Ihre Einrichtung
- Industrieroboter in der Automobilindustrie
- Ausstattung von Industrierobotern für extreme Lagerumgebungen
- Die 3 wichtigsten Mythen über die industrielle Roboterintegration