


Schlüsselfaktoren bei der Entwicklung der elektronischen Geschwindigkeitsregelung einer Drohne
Der Schlüssel zum Design einer Drohne ist die Fähigkeit, die Geschwindigkeit und Rotation des Motors zu steuern. Die meisten Drohnen werden von bürstenlosen Gleichstrommotoren angetrieben, die eine ständige Regulierung von Geschwindigkeit und Drehrichtung erfordern. Ein elektronisches Geschwindigkeitsregelungsmodul (ESC) übernimmt diese Funktionen und umfasst eine Stromversorgungsstufe, eine Stromerfassungsschaltung, einen Mikrocontroller und eine Kommunikationsschnittstelle mit dem Flugsteuerungssystem, wodurch es für Drohnen grundlegend ist. Dieser Artikel wirft einen Blick auf die wichtigen Elemente, die bei der Entwicklung eines Reglers zu berücksichtigen sind, sowie auf die Entwicklungslösungen des Marktes.
Motorsteuerung
Das Design eines ESC erfordert eine sorgfältige Bewertung und Analyse von Eigenschaften, die wie folgt zusammengefasst werden können:
- Batterie in der Drohne installiert
- Motoren
- Verfügbares Budget
- Elektromagnetische Verträglichkeit (EMV) und Störfestigkeit
Auf Drohnen können zwei Arten von bürstenlosen Motoren installiert werden:bürstenlose Gleichstrommotoren (BLDCs) und bürstenlose Wechselstrommotoren (BLACs), auch bekannt als Permanentmagnet-Synchronmotoren (PMSMs). Die Wahl des zu verwendenden Motortyps wird durch den gewählten Regelalgorithmus beeinflusst, der entweder eine Trapezregelung oder eine feldorientierte Regelung (FOC) sein kann. Der Trapezmotor-Steuerungsalgorithmus hat die folgenden Hauptmerkmale:
- Motorsteuerung basierend auf einer sechsphasigen Schaltsequenz
- Erkennung des magnetischen Winkels des Rotors, um den richtigen Winkel einzustellen; jeder Schritt entspricht einem 60°-Winkel
- In sensorlosen Regelsystemen wird der Schaltwinkel durch Messung der Gegen-EMK-Phasenspannung geschätzt
Der FOC-Regelalgorithmus hingegen hat die folgenden Eigenschaften:
- Motorsteuerung durch sinusförmige Phasenspannungen oder -ströme (FOC)
- Rotorwinkelerkennung mit einer minimalen Genauigkeit von 1° bis 5°, wodurch sichergestellt wird, dass der Algorithmus immer in der Lage ist, das maximale Drehmoment zu liefern
Bei sensorlosen Regelsystemen wird der Magnetwinkel des Motors aus den Motorphasenspannungen und -strömen geschätzt. Seine Position wird durch Überwachung bestimmter elektrischer Parameter des Motors und ohne den Einsatz zusätzlicher Sensoren bestimmt. Der am häufigsten in Drohnen verwendete Typ ist der bürstenlose Gleichstrommotor aufgrund seiner geringen Größe, relativ geringen Kosten und seiner hohen Haltbarkeit und Robustheit.
Die meisten Drohnen haben mindestens vier Motoren, wobei die viermotorige Version am häufigsten verwendet wird. Der ESC ist für die Steuerung jeder Motordrehzahl verantwortlich, und daher beinhaltet die gängigste Drohnenarchitektur die dedizierte Verwendung eines ESC für jeden Motor. Alle ESCs müssen über den Flugregler direkt oder indirekt miteinander kommunizieren können, um die Drohne einfach steuern zu können. Auch die Drehrichtung jedes Motors ist wichtig:Bei einem Quadrocopter dreht sich ein Motorenpaar in eine Richtung, während das andere in die entgegengesetzte Richtung dreht.
Die von ESC-Herstellern am häufigsten verwendete Motorsteuerungstechnik ist die feldorientierte Steuerung, eine Technik, die das Drehmoment und die Drehzahl des Motors steuert. Bei korrekter Implementierung kann FOC selbst schnelle Beschleunigungsänderungen verarbeiten, ohne Instabilität zu erzeugen, sodass die Drohne komplexe Manöver bei maximaler Effizienz ausführen kann.
Das Blockdiagramm in Abbildung 1 unten zeigt eine FOC-Architektur, die die folgenden Komponenten umfasst:
- Stromregler bestehend aus zwei integrierten Proportionalreglern
- Optionaler externer Schleifengeschwindigkeitsregler und Referenzstromgenerator
- Clarke-, Park- und inverse Park-Transformationen zur Umwandlung von stationären in rotierende synchrone Frames
- Ein Raumvektor-Modulatoralgorithmus zum Umwandeln von vα- und vβ-Befehlen in Pulsbreitenmodulationssignale, die an Statorwicklungen angelegt werden
- Schutz- und Zusatzfunktionen, einschließlich Start- und Abschaltlogik
- Optionaler Beobachter zum Schätzen der Winkelposition des Rotors, wenn eine sensorlose Steuerung gewünscht wird
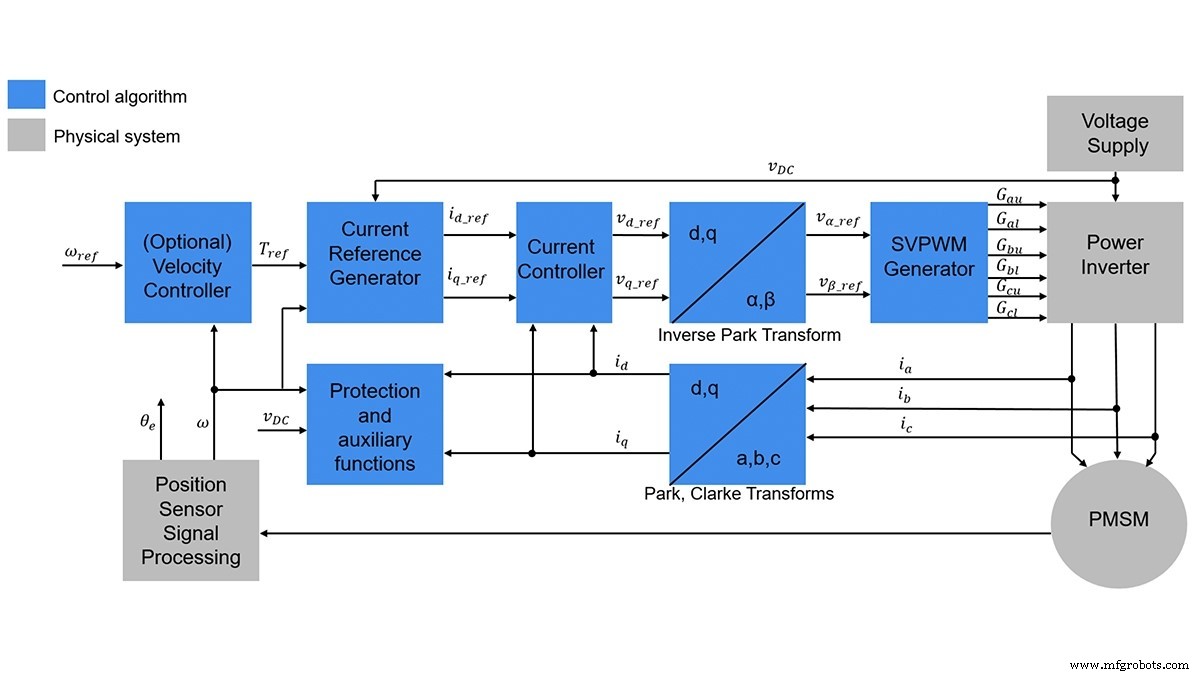
Abbildung 1. Blockschaltbild der feldorientierten Steuerung (Quelle:Mathworks)
Motorsteuerungsingenieure, die ein FOC entwerfen, führen verschiedene Aufgaben durch, darunter die Entwicklung der Controller-Architektur mit zwei PI-Reglern für die Stromschleife, die Optimierung aller Verstärkungen aller PI-Regler, um die Leistungsanforderungen zu erfüllen, und die Entwicklung eines Raumvektormodulators zur Steuerung der PWM.
Sobald der Regelalgorithmus ausgewählt ist (trapezförmig oder FOC), besteht der nächste Schritt darin, zwischen einem offenen oder geschlossenen Regelsystem zu wählen. Bei der Steuerung mit offenem Regelkreis wird der Synchronmotor (BLDC oder BLAC) über ein Steuersignal angetrieben und es wird angenommen, dass er der befohlenen Steueraktion folgt. Im geschlossenen Regelkreis ist die Schaltung in der Lage zu prüfen, ob sich der Motor wie vorgesehen bewegt. Ist dies nicht der Fall, gleicht das Steuerungssystem die Über- oder Unterbewegung automatisch aus, indem es den Strom verringert oder erhöht.
Bei Verwendung eines geschlossenen oder offenen (sensorlosen) Regelsystems müssen Ströme und Spannungen gemessen werden, um als Rückkopplungssignale verwendet zu werden. Abbildung 2 zeigt einen typischen Messaufbau, der sowohl für trapezförmige als auch für sinusförmige Regelsysteme geeignet ist. Durch die Trapezsteuerung mit einem sensorlosen Algorithmus werden die dreiphasigen Spannungen vom sensorlosen Algorithmus verwendet, um den Rotorwinkel zu berechnen.
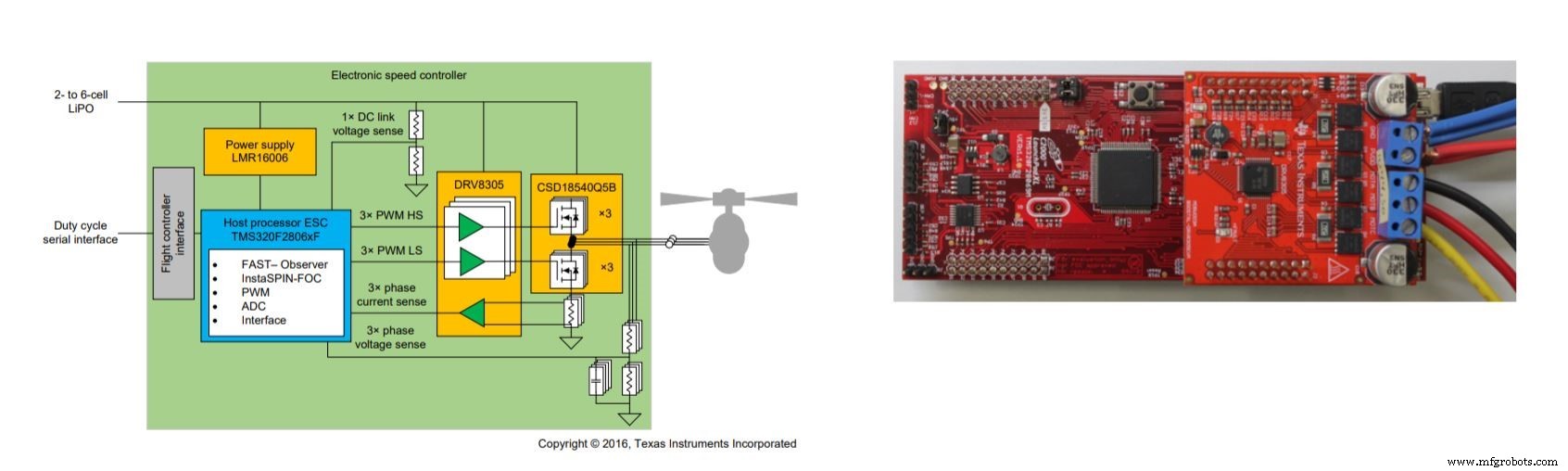
Abbildung 2. ESC mit sensorloser Motorsteuerung. Rechts ist das High-Speed Sensorless-FOC-Referenzdesign für Drohnen-Regler von Texas Instruments und links dessen Blockschaltbild. (Quelle:Texas Instruments)
Quadcopter-Dynamik
Die mechanische Einfachheit und aerodynamische Stabilität von Drohnen hängen mit dem koordinierten Einsatz von Motoren und deren Manövern zusammen. Bei einem Quadrocopter dreht sich das auf der Diagonale der Struktur positionierte Motorenpaar in die gleiche Richtung, jedoch in die entgegengesetzte Richtung zu den beiden anderen Motoren. Drehen alle vier Motoren gleich schnell, kann die Drohne steigen, sinken oder im Horizontalflug bleiben. Wenn sich das diagonale Paar schneller dreht als das andere, dreht sich die Drohne um ihren Schwerpunkt und bleibt in derselben horizontalen Ebene (Abbildung 3).
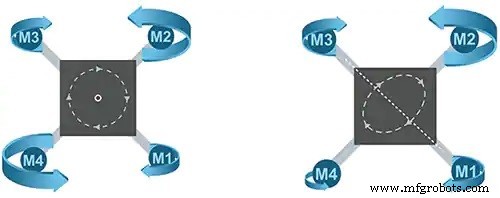
Abbildung 3. Drohnen verwenden verschiedene Kombinationen von Rotorgeschwindigkeiten, um Manöver auszuführen. (Quelle:STMicroelectronics)
Wenn Sie die Geschwindigkeit des Kopf- (oder Heck-) Rotors ändern, zeigt die Drohne nach oben oder unten wie ein Starrflügler, der nach unten taucht. Die Drehmomenteinstellung nach links oder rechts lässt die Drohne rollen, wodurch sie sich um ihre Achse dreht. Es liegt am Flugsteuerungssystem der Drohne, die Geschwindigkeit des entsprechenden Rotors zu ändern, um die für das gewünschte Manöver erforderliche Flughöhe zu erreichen.
Für einen Regelungstechniker ist die Drehzahlkorrektur ein häufiges Regelkreis-Feedback-Problem, das mit einem Proportional-Integral-Differential-Regler (PID) gelöst wird.
ESC entwerfen
Die Entwicklung eines ESC für Drohnen erfordert hochwertige Komponenten, die speziell für die Steuerung von Motoren mit hoher Drehzahl (12.000+ U/min) entwickelt wurden. Texas Instruments hat eine Familie von MCUs namens InstaSPIN entwickelt, die das Design von Drehstrom-Motorsteuerungsanwendungen vereinfacht. InstaSPIN-FOC, geeignet für sensorlose Systeme, verfügt über einen schnellen Software-Encoder mit Drehmoment- und Drehzahlregelung, der für jeden Drehstrommotor geeignet ist. InstaSPIN-MOTION richtet sich an sensorlose Systeme und bietet Positions-, Drehzahl- und Drehmomentsteuerung für jeden Drehstrommotor.
Ein vollständiges Referenzdesign für diese Oszilloskope wird von TI bereitgestellt und besteht aus den Motorsteuerungstechnologien InstaSPIN-FOC und InstaSPIN-MOTION. Die Plattform umfasst einen 32-Bit-TI C2000 InstaSPIN-Mikrocontroller. Es ermöglicht Entwicklern, einen Drehstrommotor zu identifizieren, automatisch einzustellen und zu steuern, wodurch schnell ein stabiles und funktionsfähiges Motorsteuerungssystem bereitgestellt wird.
STMicroelectronics bietet ein komplettes ESC-Referenzdesign, das einen sensorlosen FOC-Algorithmus implementiert. Das Referenzdesign des STEVAL-ESC001V1 ESC eignet sich für kommerzielle Drohnendesigns der Einstiegsklasse und treibt jeden bürstenlosen Dreiphasenmotor (oder PMSM) an, der von 6S LiPo-Akkupacks oder einem gleichwertigen Gleichstromnetzteil mit bis zu 30 A Spitzenstrom betrieben wird. STEVAL-ESC001V1 ermöglicht Entwicklern eine schnelle Entwicklung ihrer Anwendung dank eines vollständig vorkonfigurierten Firmware-Pakets (STSW-ESC001V1), das einen sensorlosen feldorientierten gesteuerten Algorithmus mit Drei-Shunt-Strommessung, Geschwindigkeitsregelung und vollaktiver Bremsung implementiert. Das Firmware-/Softwarepaket STSW-ESC001V1 plus die MC-Bibliothek des STM32 PMSM FOC-Softwareentwicklungskits ermöglicht die Optimierung des ESC-Designs durch Einwirken auf die in einer STM32-MCU eingebetteten FOC-Parameter und nutzt den ST-Motorprofiler, um die relevanten Motorparameter schnell abzurufen. Der sensorlose FOC-Algorithmus von ST kann an jede dreiphasige BLDC- oder PMSM-Motoranwendung angepasst werden und bietet längere Flugzeiten und optimale dynamische Leistung (Abbildungen 4 und 5).
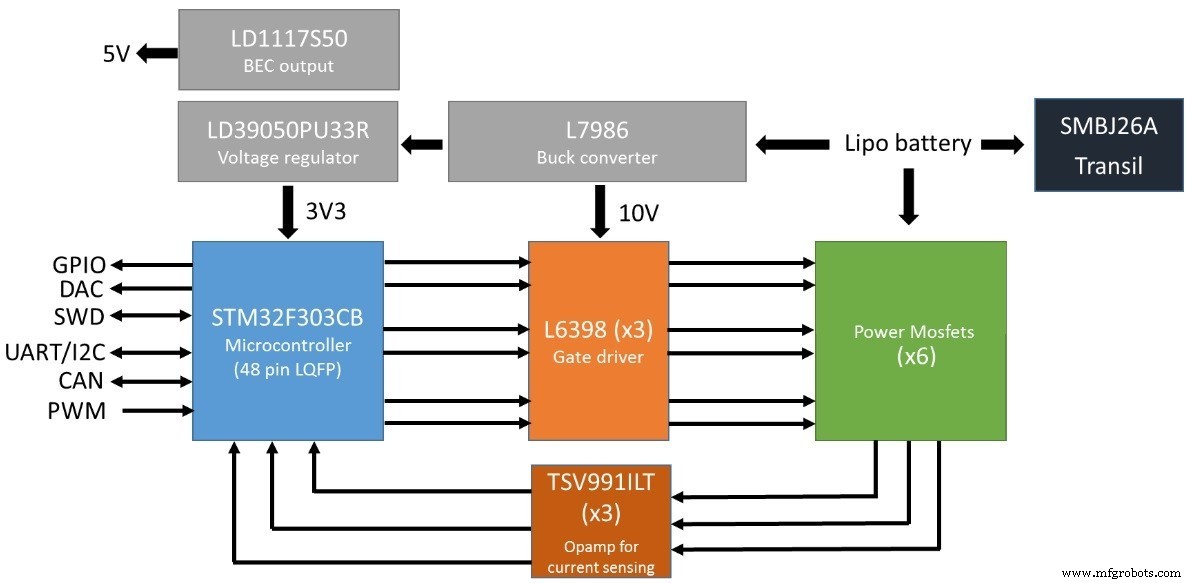
Abbildung 4. Blockschaltbild der STEVAL-ESC001V1-Lösung von ST (Quelle:STMicroelectronics)
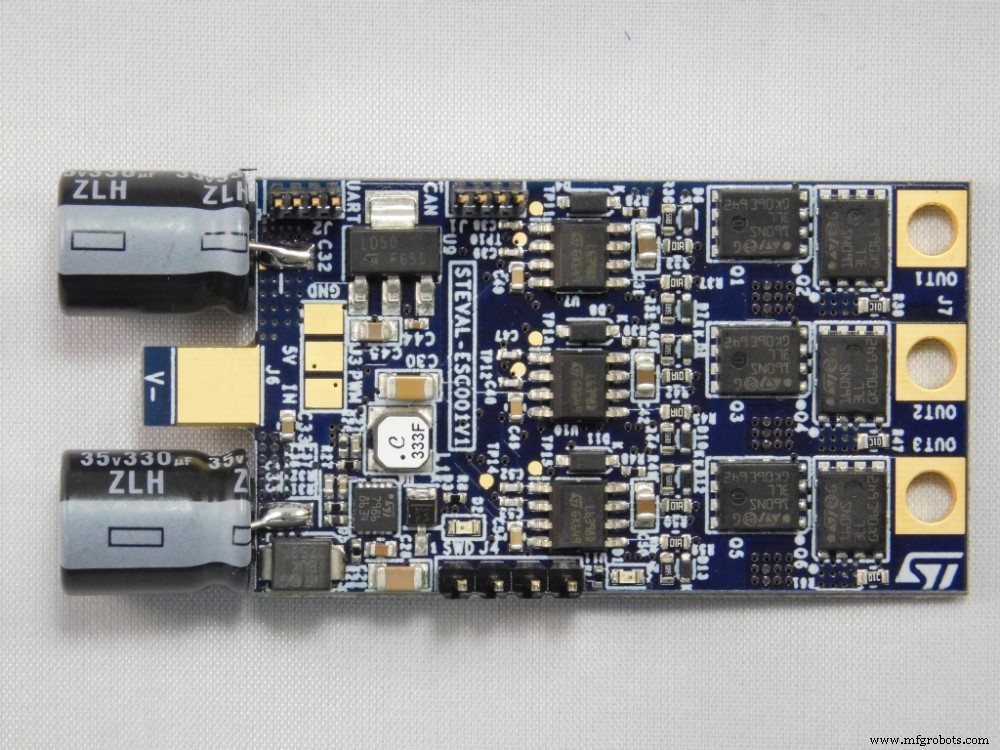
Abbildung 5. STEVAL-ESC001V1-Platine von ST (Quelle:STMicroelectronics)
Die Drohnen-Entwicklungsplattform von HoverGames ist eine modulare und flexible NXP-Hardware-/Softwarelösung, mit der jedes autonome Fahrzeug gebaut werden kann, von Drohnen und Rovern bis hin zu UAVs. Das Entwicklungskit basiert im Wesentlichen auf einem Mikroprozessor mit Linux und Open CV und diversen begleitenden Sensoren zur Flugführung.
Der Flugregler sorgt dafür, dass die Drohne stabil bleibt. Das Board ist Open Source mit der Möglichkeit, andere externe Sensoren einzufügen, um den Betrieb entsprechend der Funktionalität zu optimieren.
Ein LiPo-Akku und ein länderspezifisches Telemetrie-Funkgerät müssen über eine der IoT-Anschlüsse implementiert werden. Um die volle Funktionalität des Kits zu gewährleisten, müssen Sie auswählen, welches der beiden verfügbaren Telemetrie-Funkgeräte Sie kaufen möchten. Durch Telemetrie können Sie während des Fluges eine Live-Verbindung zum Fahrzeug haben und den Status der Drohne während des Fluges einsehen, autonome Wegpunkte laden und steuern sowie notwendige Änderungen vornehmen. Telemetriedaten werden an die Kontrollstation gesendet, aber auch an Bord in der Flugeinheit gespeichert.
Zu den Kit-Komponenten gehören außerdem ein DC-zu-DC-Stromversorgungsmodul, ein GPS NEO-M8N-Modul mit Halterung, ein Sicherheitsschalter, ein Summer, eine helle RGB-Status-LED, ein SEGGER J-Link EDU Mini/FTDI USB-TTL-3V3-Kabel/eine Debug-Breakout-Platine mit Kabel , bürstenlose BLDC-Motoren 2212 920 kV und ESC-Motorsteuerungen 40 A OPTO (Abbildung 6).
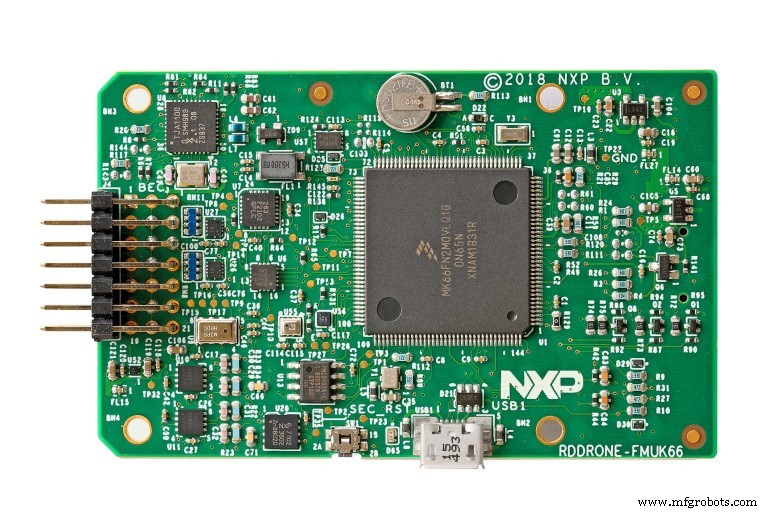
Abbildung 6. RDDRONE-FMUK66-Flugeinheit (Quelle:NXP)
>> Dieser Artikel wurde ursprünglich veröffentlicht am unsere Schwesterseite Power Electronics News.
Verwandte Inhalte:
- Entwicklung elektronischer Geschwindigkeitsregler für Drohnen
- Drohnen setzen auf kabellose Ladelösungen
- LiDAR-Sensor unterstützt hochauflösende Bildgebung in UAVs
- Entwicklungskits bieten Plattformen für digitale Stromversorgungs- und Motorsteuerungsdesigns
- Entwicklung von Motorsteuerungen für Robotersysteme
- Sensorfusion bringt mehrere Vorteile
Für mehr Embedded, abonnieren Sie den wöchentlichen E-Mail-Newsletter von Embedded.
Eingebettet
- Freigabe- und Interlock-Schaltungen
- Renesas erweitert Mikrocontroller-Optionen für die Servosteuerung in Industrierobotern
- Entwicklung von Motorsteuerungen für Robotersysteme
- Motorcontroller integriert Arm Cortex-M0-Kern
- Qualitätskontrolle ist der erste Schritt zur Zuverlässigkeit des Motors
- Spannungskontrolle in der Bahnhandhabung – Schlüsselkomponenten
- Integrierte VSD-Kompressoren:8 Hauptvorteile
- Was bestimmt die Drehzahl eines Hydraulikmotors
- Wie steuert man die Drehzahl eines Hydraulikmotors?
- Was bestimmt die Drehzahl eines Hydraulikmotors?