


Die Unterschiede zwischen SPS und RTUs
Die Konvergenz zwischen speicherprogrammierbaren Steuerungen (SPS) und Remote Terminal Units (RTUs) ist relativ neu. Bezogen auf die installierte Basis haben SPSen RTUs längst überholt und dominieren seit Jahrzehnten den Markt quasi als Handelsware.
Angetrieben von diesem Wachstum verbesserten viele Anbieter die SPS-Funktionen und versuchten in einigen Fällen, den RTU-Markt zu erobern, indem sie ähnliche RTU-ähnliche Funktionen für SPS entwickelten. Dies geschieht so weit, dass einige SPS als RTUs vermarktet werden.
Auf der anderen Seite sind die Ursprünge und die Geschichte hinter jedem Gerät unterschiedlich. RTUs ihrerseits haben die Entwicklung der SCADA-Systeme, deren wesentliche Bestandteile sie sind, eng begleitet.
SCADAs und RTUs wurden zuerst in der Telekommunikationsindustrie und später in den 1950er Jahren in Kraftwerken eingeführt. Das Problem, das sie zu lösen versuchten, war die Übertragung von Daten von Feldinstrumenten über sehr lange Distanzen.

Abbildung 1. Stromverteilungsnetze verlassen sich auf RTUs und SCADA, um wichtige Variablen über große Entfernungen zu überwachen.
SPS kamen erst später, in den frühen 1970er Jahren, auf den Markt. SPS wurden erst möglich, als kompakte Personal Computing und Mikroprozessoren ein bestimmtes Stadium erreichten, in dem sie für die Massenproduktion geeignet waren. SPS hielten direkt Einzug in die Welt der industriellen Fertigung und ersetzten komplexe, unflexible Schaltungen, die aus zahlreichen Relais bestehen, durch ein kompaktes Gerät, das leichter in die Produktionshallen passt. Die Automobilindustrie gehörte zu den ersten, die von der Einführung von SPS profitierten.
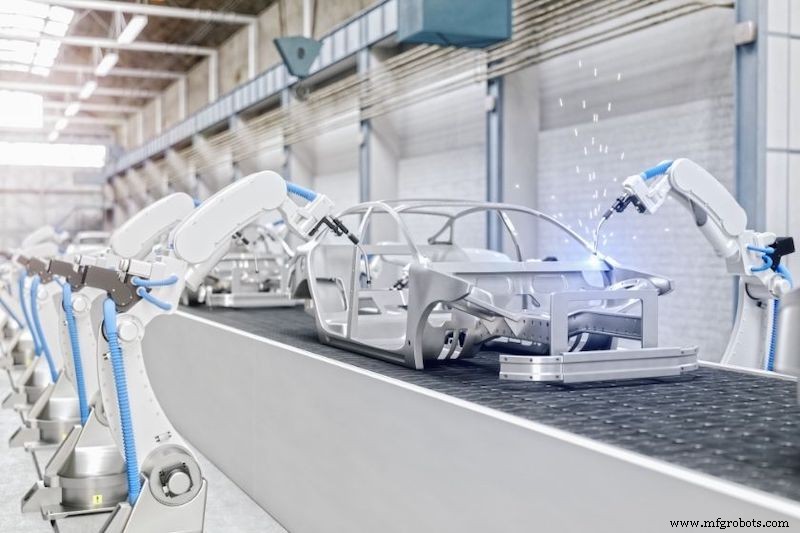
Abbildung 2. Die hochautomatisierte Automobilherstellung basiert auf zahlreichen SPS.
Was ist eine SPS?
SPS sind im Wesentlichen Computer, die für die Automatisierung industrieller Prozesse entwickelt wurden. Eine SPS besteht aus einer Zentraleinheit (CPU) und Ein- und Ausgängen. Die CPU ist für die Ausführung des vom Benutzer installierten Programms verantwortlich. Typischerweise können verschiedene Modultypen in eine SPS integriert werden:digitale und analoge Ein- und Ausgänge, Netzwerkkommunikation, Protokolladapter, Buserweiterungen usw.
Es können verschiedene Programmiersprachen verwendet werden, um Anweisungen für SPS zu codieren, wobei Kontaktplan und strukturierter Text die beliebtesten sind. Ein Kontaktplan, manchmal auch als Kontaktplanlogik bezeichnet, ist eine visuelle Programmiersprache, die das Öffnen und Schließen von Kontakten und Relais emuliert. Strukturierter Text verwendet eine ähnliche Syntax wie C-basierte Sprachen. Es ermöglicht komplexere Anweisungen als Leitern; daher wird es im Allgemeinen in komplexeren Steuerungsanwendungen verwendet.

Abbildung 3. Eine Siemens SIMATIC S7-1500 SPS, eine der am weitesten verbreiteten modernen SPS. Bild mit freundlicher Genehmigung von Siemens
Jede SPS arbeitet, indem sie zyklisch drei grundlegende Aufgaben nacheinander ausführt:Eingänge lesen, das Programm ausführen und Ausgänge schreiben.
Zu Beginn jedes Zyklus muss die SPS den Status aller angeschlossenen physischen Eingänge aktualisieren, damit der richtige Status verwendet wird. Dann wird das vorgeladene Programm ausgeführt, das Hauptroutinen und Unterroutinen durchläuft. Schließlich werden die physischen Ausgänge basierend auf den Ergebnissen der Programmausführung aktualisiert. Dies geschieht in jedem SPS-Zyklus, und die Zykluszeit ist eine der wichtigsten Metriken, die Programmierer häufig versuchen, für eine höhere Systemleistung zu optimieren.
Was ist eine RTU?
RTUs sind mikroprozessorbasierte Steuereinheiten zur Überwachung und Steuerung von Feldgeräten. Sie werden hauptsächlich in SCADA-Systemen eingesetzt und stellen die Schnittstelle zwischen der SCADA-Steuerung und den physikalischen Prozessen und deren Sensoren und Instrumenten dar. Ähnlich wie SPS bestehen auch RTUs aus CPU- und Ein- und Ausgangsmodulen sowie Kommunikations- und Protokollübersetzungsoptionen.

Abbildung 4. Eine RTU und E/A in einem Gehäuse. Bild mit freundlicher Genehmigung von AIR
Die Programmierung von RTUs ist im Allgemeinen viel einfacher als die Programmierung von SPS. Die meisten RTUs werden über ein Webinterface konfiguriert und nicht viel mehr als diese Konfiguration wird durchgeführt. Obwohl moderne RTUs kompatibel sind, sind die meisten nicht vorgesehen oder unterstützen keine Regelkreise und komplexe Logik. Die Zykluszeiten sind extrem schnell, typischerweise im Bereich von 1 Millisekunde.
Vergleich von SPS und RTUs
Angefangen bei der Programmierbarkeit kann dies je nach Situation als Vor- oder Nachteil gewertet werden. RTUs mit ihrer einfachen Benutzeroberfläche könnten als benutzerfreundlicher angesehen werden. Andererseits ist dieselbe Schnittstelle für ein komplexes Steuerungssystem unflexibel und manchmal nicht mit der Anwendung kompatibel.
RTUs sind im Allgemeinen größer als SPS. Ein Grund dafür sind die zusätzlichen Features, die die Haltbarkeit und Robustheit des Geräts erhöhen, die mehr Platz beanspruchen. Das herausragendste Merkmal ist das Gehäuse, das für raue Umgebungsbedingungen benötigt wird. SPS sind zum Teil kompakter, weil sie für Industrien und Fabriken gedacht sind, in denen der verfügbare Platz normalerweise nicht ausreichend ist.
RTUs sind aufgrund der Anforderungen an Größe und Lebensdauer im Durchschnitt teurer als SPS. Dies ist jedoch in der Regel kein entscheidender Faktor bei der Auswahl eines Gerätetyps. Bei SPS für industrielle Umgebungen und RTUs für Fernsysteme im Freien gehen Kostenüberlegungen mit der Größe des Projekts einher.
Im Allgemeinen sind RTUs besser für die Fernüberwachung geeignet, z. B. in Versorgungsunternehmen und in der Landwirtschaft. Inzwischen werden SPS in allen Branchen weitgehend eingesetzt und werden wahrscheinlich nicht so schnell ersetzt werden. Obwohl beide Geräte einige Ähnlichkeiten aufweisen, werden sie auf unterschiedliche Weise verwendet.
Verwenden Sie in Ihrem Job mehr RTUs oder SPS? Warum?
Automatisierungssteuerung System
- Die Unterschiede zwischen Mexiko und US-Zollagenten
- SPS, PACs und IPCs:Was ist der Unterschied?
- Was sind die Unterschiede zwischen Wartung und Reparatur?
- Was ist der Unterschied zwischen Industrie 4.0 und Industrie 5.0?
- Die Hauptunterschiede zwischen 3-Achsen- und 5-Achsen-Bearbeitung
- Unterschiede zwischen SCADA und HMI
- Der Unterschied zwischen Gleichstrom- und Wechselstrommotoren
- Delaware:die perfekte Mischung aus Mensch und KI
- Die Unterschiede zwischen G-Code und M-Code
- Die Unterschiede zwischen CNC-Fräsen und CNC-Drehen