


16F877:Grundlegendes zu PIC 16F877 Mikrocontroller-Funktionen, Pins und Schnellverbindung
PIC16F877 hat viele Funktionen, die diesen Mikrocontroller sowohl für Anfänger als auch für Profis großartig machen.
PIC16F877A enthält alles, was PIC16F877 hat, und enthält einen internen Taktoszillator, ein besser funktionierendes Analog-Digital-Wandlermodul (ADC) und mehr!
Dieser Artikel behandelt die Funktionen des PIC16F877-Mikrocontrollers und stellt Ihnen den Ein-/Ausgangsport und die einfache Verbindung vor. Es wird Ihnen helfen, diese Schaltkreise und ihre Verwendung zu verstehen.
1.PIC 16F877 Übersicht
PIC16F877 bedeutet, dass dieser PIC-Mikrocontroller mehrere Aufgaben mit Hilfe von Software ausführen kann.
Das Design des PIC 16F877 ist für die Verwendung als Standalone oder als Ergänzung zu den Schaltungen anderer Geräte vorgesehen. Zum Beispiel RAMPS- und Arduino-Boards. Es kann auch alleine funktionieren. Aber wenn Sie möchten, dass dies ohne Probleme funktioniert, benötigen Sie einen Quarzoszillator (Frequenz).
PIC 16F877 ist ein vollständig statisches Gerät, was bedeutet, dass es mit einer begrenzten Menge an Flash und RAM arbeitet. Darüber hinaus hat es eine ausgezeichnete Betriebsflexibilität, ist billig und wird am häufigsten in Schaltkreisen verwendet.
(Mikrocontroller)
2. Merkmale von PIC 16F877
(Mikrochip)
Die allgemeinen Merkmale von PIC16F877 sind:
– Energiesparender STOP-Modus, was bedeutet, dass Sie PIC16F877 stoppen können, ohne ihn aus der Schaltung zu entfernen
– Das Hochgeschwindigkeits-PWM-Modul (Pulsweitenmodulation) kann bis zu 256 Ausgangspegel erzeugen und verfügt über einen integrierten taktprogrammierbaren Prescaler
– Ein interner Spannungsregler für die I/O-Schaltung und ein integrierter Oszillator (Kristall- oder Keramikresonator)
– Ein On-Chip-Komparatormodul
– Analog-Digital-Wandler, mit einer Auflösung von 12 Bit und kann bis zu vier analoge Eingangskanäle gleichzeitig wandeln
– Unterstützt externe Interrupts, die zum Aufwecken des Geräts aus dem Schlafmodus oder für andere Zwecke verwendet werden.
– Acht verschiedene Energiesparmodi
(Zerlegter Mikrocontroller)
– Analogkomparatormodul
– Bis zu 23 E/A-Pins
– Ein SPI-Modus und vier UART-Module (ein Vollduplex)
– Interrupt-Controller mit bis zu 14 Interrupt-Quellen
– Watchdog-Timer, der bei Ablauf des Zeitintervalls einen Interrupt generiert
– Power-On-Reset-Erzeugungsschaltung
– Programmierbarer Brownout-Detektor (BOD)
– Interner kalibrierter Oszillator, der es der internen RC-Schaltung ermöglicht, als Taktquelle zu arbeiten
– In-Circuit Serial Programming und In-Circuit-Debugging-Fähigkeit über die debugWIRE-Schnittstelle
(Mikrocontroller)
Die wichtigsten Merkmale von PIC 16F877 sind:
- Bis zu 20 MHz interne Taktfrequenz
- Verfügt über fünf (A-E) grundlegende Eingabe-/Ausgabeports
- 8 10-Bit-\ADC-Eingangskanäle
- Hat PSP als parallele Kommunikation
- PIC16F877A hat 8 KB Flash-Speicher
- Zwei serielle Kommunikationsschnittstellen:2-wire Inter-Integrated Circuit (I²C™ )-Bus und SMBus
- 368 Ebenen Datenspeicherbytes mit 256 Ebenen (14bit) EEPROM Datenspeicher
- Verfügt über drei Timer, d. h. einen 16-Bit-Timer und 2 8-Bit-Timer, die im Timer- oder Zählermodus verwendet werden können
Zusätzliche Funktionen
– Es ist in C-Sprache programmierbar.
– Der Mikrocontroller läuft mit einem internen 16-MHz-Oszillator
– PIC16F877A ist als Master oder Slave konfigurierbar und wird mit einem SPI-Modul geliefert.
3. Pin-Diagramme des Mikrocontrollers PIC16F877A:
PIC16F877-Chips gibt es in verschiedenen Designs und Typen. Beispielsweise 40-PIN-DIP-, 44-PIN-TQFP- und 44-PIN-QFN-Designs. Diese Unterschiede ergeben sich aus ihrer vielfältigen Nutzung und Anwendung. Das Bild unten zeigt PIC16F877A-Techniken und Pins.
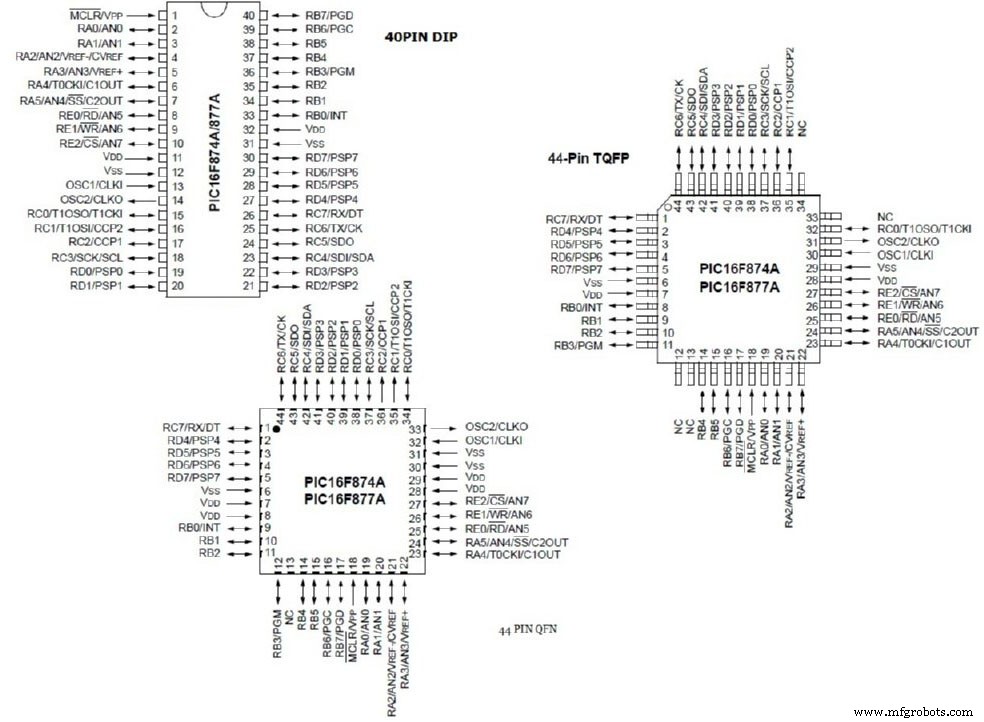
(Pin-Diagramme des PIC 16877-Chips)
QUELLE; Microchip Datasheetspdf.com
4. Einführung in die Eingangs-/Ausgangsport-Beschreibungen
Jedem Port des Mikrocontrollers sind zwei Register zugeordnet. Zum Beispiel Port C; seine Register sind PORTC und TRISC. Das TRISC-Register bestimmt, ob der Port Ausgang oder Eingang ist. Außerdem können Sie jedem Pin unabhängig voneinander Werte zuweisen.
Verwenden Sie beim Programmieren von Mikrocontrollern Compiler für Ihre Softwarearbeit. Der beste Compiler für PIC16877A ist MPLAB XC8 COMPILER.
– PORT A-Konfiguration fungiert als analoger Eingangsport, digitaler I/O oder PWM-Ausgang. Port A hat sechs Pins, die von Pin Nr. 2 bis Nr. 7 reichen; Beschriftet als RA0 bis RA5
– Die Konfiguration von PORT B funktioniert als Digitaleingang, Analogeingang, Timer-Eingangserfassung, Timer-Ausgangsvergleich, PWM-Eingang. Port B hat 8 Pins, d. h. von Pin Nr. 33 bis Nr. 40; Beschriftet als RBO bis RB7
– PORT C-Konfiguration ist ein Zähler/Timer-Modul (Eingang oder Ausgang), UART und SPI. Port C hat auch 8 Pins. Die ersten 4 sind von Pin #15 bis #18, und die anderen 4 sind von Pin #23-#26. Diese Pins sind RCO bis RC7
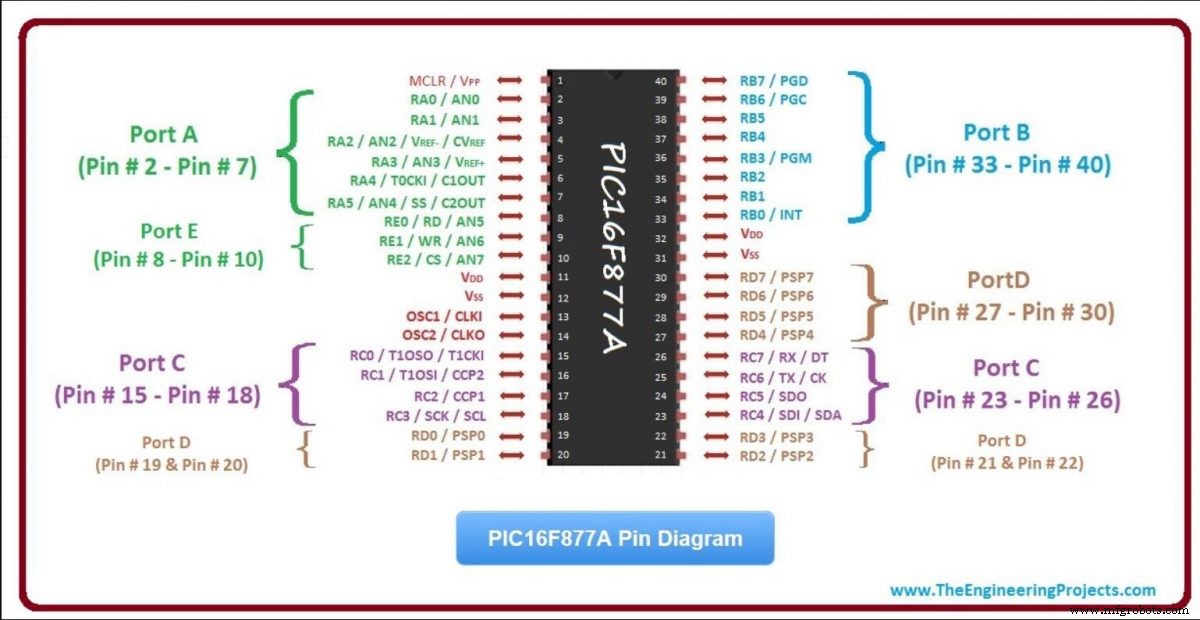
(Abbildungen der Anschlüsse PIC16F877A)
QUELLE:Theengineeringprojects.com
– PORT D-Konfigurationen sind digitale Eingangspins, analoge Eingänge und Timer-Ausgänge. Port D hat ebenfalls 8 Pins. Die ersten 4 sind von Pin #19-#22, und die anderen sind von Pin #27-#30. Diese Pins sind RD0 bis RD7
– PORT E ist für die Werksnutzung reserviert. Es hat drei Pins #8-#10, die RE0 bis RE2 sind.
– VDD und VSS sind Stromversorgungspins, während MCLR der Master-Clear-Pin ist.
– PIC16F877A hat bis zu 18 GPIO-Pins, die die Controller-Konfiguration als Eingang oder Ausgang mit den zugehörigen Registern ermöglichen.
– Zusätzlich zu den GPIO-Pins gibt es einige andere dedizierte Pins von PIC16F877A auf seiner Oberseite.
– VDD ist der positive Versorgungsspannungspin, während VSS die Massereferenz ist.
– PIC16F877A hat 23 I/O-Pins, aufgeteilt in zwei Bänke; Bank A und Bank B.
– Jeder I/O-Pin hat ein eindeutiges Bit, das bei Zuweisung als Ein- oder Ausgang fungieren kann.
5. Von der Theorie zur Praxis - Blinkende LEDs mit PIC16F877A
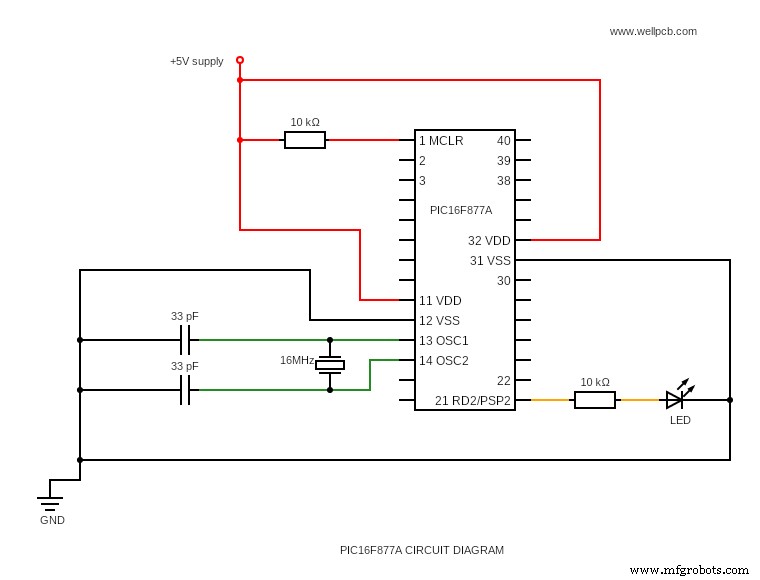
(Schaltplan PIC16F877A)
Das obige Diagramm zeigt Ihnen, wie Sie LEDs mit PIC16F877A verbinden. Außerdem werden die kritischen Mikrocontroller-Pins hervorgehoben, die Sie während der Verbindung benötigen. Für schnellen Anschluss;
- Schließen Sie zuerst 5 V an MSLR-Pin Nr. 1 an und fügen Sie einen 10-kOhm-Widerstand hinzu.
- Schließen Sie außerdem die 5 V an Pin Nr. 11 (VDD) an. Verbinden Sie auf der anderen Seite 5 V mit Pin Nr. 32 (VSS).
- Erde an VSS (Pin Nr. 12) bereitstellen. Verbinden Sie dann die Pins Nr. 13 (OSC1) und Nr. 14 (OSC2) mit dem 16-MHz-Quarzoszillator.
- Schließen Sie danach 2 Kondensatoren von 33 pF an Masse an. Verbinden Sie nun Pin #31 (VSS) mit Masse.
- Schließen Sie die LED und den 10-kOhm-Widerstand an Pin Nr. 21 (RD2) an, um das Hochladen des Programms zu ermöglichen.
(Elektronische Komponenten)
Um LEDs mit PIC16F877A zu blinken, verbinden Sie die LEDs zwischen PORTD und Masse. Da wir nur eine LED blinken müssen, können wir sie mit einem 10k Ohm Widerstand kombinieren. Wir müssen PORT-D als Ausgang konfigurieren, indem wir ihn auf einen High-to-Low-Übergang einstellen, indem wir den Ausgangslatch verwenden, um die LED zum Leuchten zu bringen.
Wir können PORT-D auf setzen Low-to-High-Übergang durch Schreiben von 0x01 in das Data Direction Register (DDRB). Um PORT-D auf High zu setzen, müssen wir 0x00 in das DDRB-Register schreiben, wodurch die LED aufleuchtet.
Zusammenfassung
In diesem Artikel haben wir den PIC 16F877, seine Funktionen und den Ein-/Ausgangsport des PIC16F877A kennengelernt. Wir hoffen, es hat Ihnen gefallen!
Wenn Sie sich für den PIC-Mikrocontroller interessieren, können Sie auch unsere anderen Artikel lesen. Wenn Sie außerdem Fragen zu PIC16F877 haben, können Sie sich gerne an uns wenden.
Industrietechnik
- E3.series 2021 – Neue Funktionen für Kabel und Kabelbäume und E3.series-Testversion
- Reihen-, Parallel- und Reihenparallelschaltung von Batterien
- Spritzguss-Auswerferstifte:Arten und Überlegungen
- Den Unterschied zwischen einer Verrundung und einer Fase verstehen
- Bestandsverwaltungssoftware:Funktionen und Vorteile
- PIC18-Mikrocontroller:Was er ist und wie er verwendet wird
- Transistor 2N3771:Pinbelegung, Funktionen, Anwendungen und Alternativen
- AT89c51-Mikrocontroller:Programmierung, Pinbelegung, Funktionen und Alternativen
- Arduino Protoshield – Eine schnelle und umfassende Anleitung zum Zusammenbau
- Quick Return Mechanismus verstehen