


Schneepflugroboter
Komponenten und Verbrauchsmaterialien
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 6 |
Über dieses Projekt
Warum ich einen Schneepflug-Roboter bauen wollte ?Da ich nicht unempfindlich gegenüber Lösungen bin, die das Leben erleichtern, überlegte ich, eine Lösung zu entwickeln und vorzuschlagen, die den Menschen helfen könnte, die winterliche Kälte und die Ermüdung beim Verwenden der traditionellen Handschaufel zu vermeiden Schnee vom Gehweg entfernen. Um dies zu tun, habe ich mich für etwas Spaßiges und Technologisches entschieden. Auf diese Weise habe ich mich entschieden, einen ferngesteuerten Schneepflugroboter mit starker Mechanik, Steuerelektronik und leistungsstarken Elektromotoren zu entwickeln. Das Ergebnis ist eine Miniaturversion eines echten Schneepfluges mit Raupen, motorisiertem Schild (das angehoben und bewegt werden kann) und aufgesetztem Lichtprojektor, um den Weg im Dunkeln zu erhellen. Der Roboter kann mit der PlayStation-Fernbedienung ferngesteuert werden.
Im folgenden Video seht ihr den Schneepflugroboter in Aktion, mir hat jemand gesagt das scheint zum Schaufeln der Schneepflugroboter den Anlauf nehmen muss, ES IST NICHT SO , ich habe das Video gemacht, um zu zeigen, wie der Schnee entfernt wird.
Wie wird es hergestellt?
Der Roboter besteht aus einem Rahmen, der ein motorisiertes Schild trägt (das angehoben und bewegt werden kann) und dem Antriebssystem, das aus Elektromotoren, Rädern und Raupenketten besteht. Das Chassis wird mit zusammengeschweißten Eisenstangen mit rechteckigem Querschnitt realisiert. Die Größe des Roboters beträgt 600X375X240 mm, ohne die Klinge, und sein Gewicht beträgt etwa 30 kg.
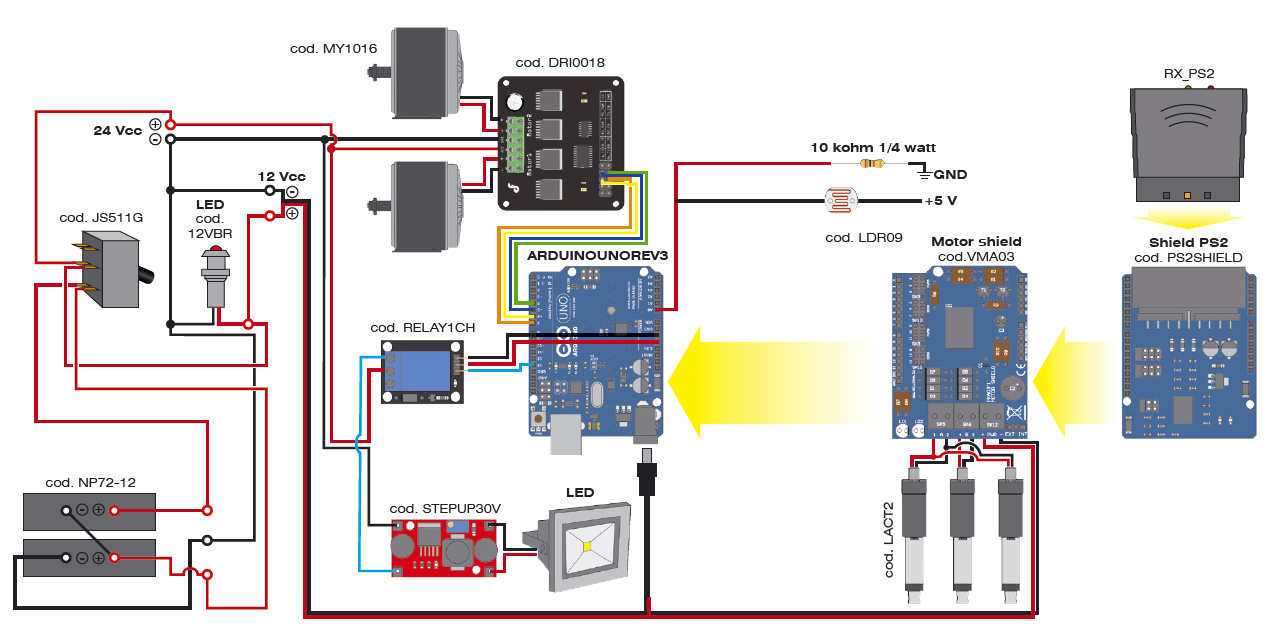

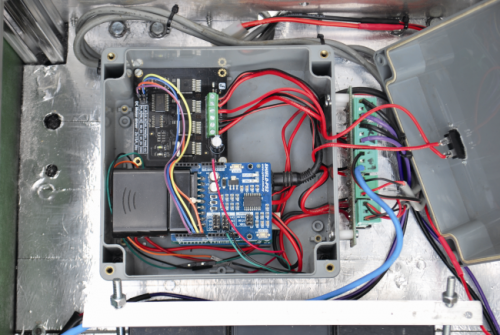
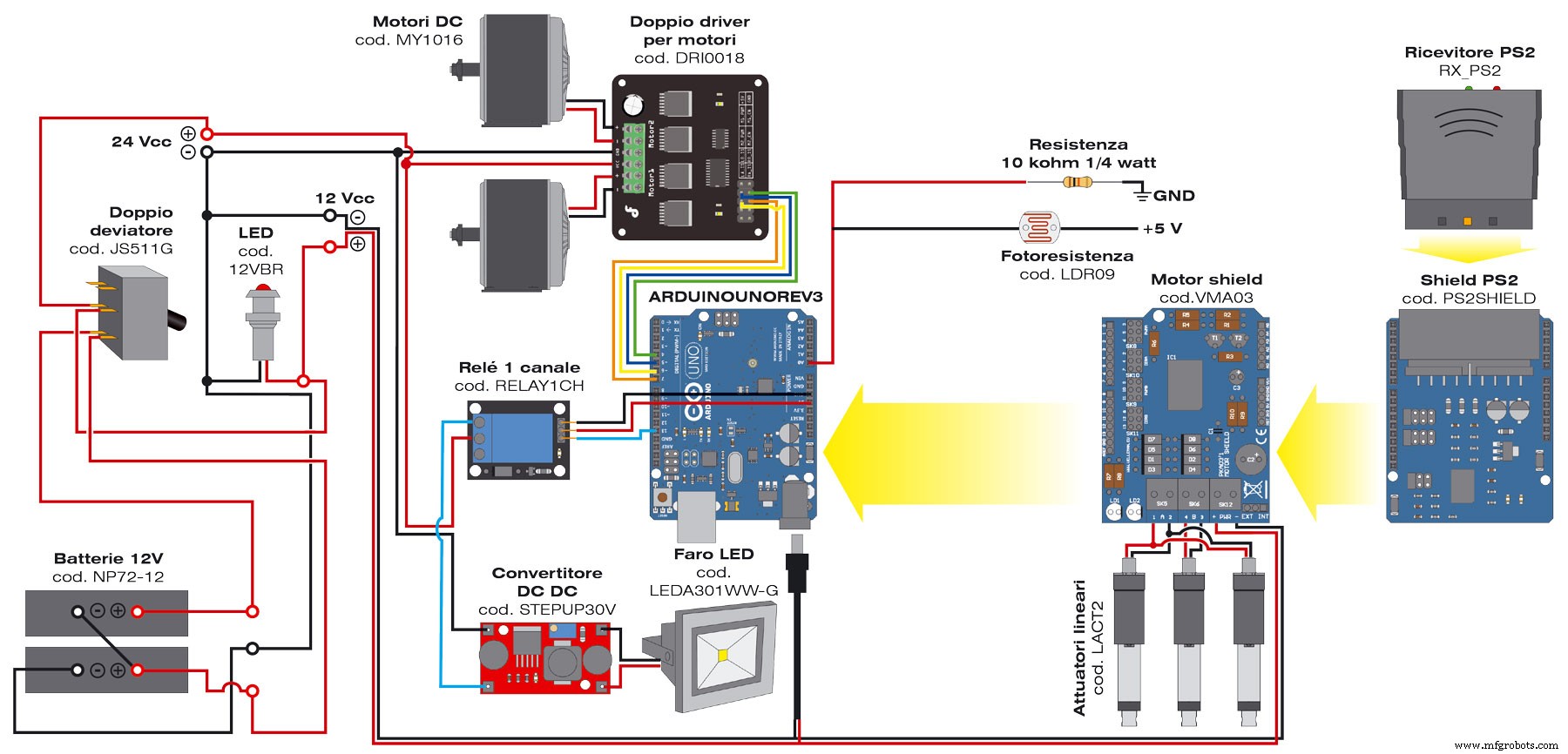
Der elektrische und elektronische Teil des Schneepflugs basiert auf Arduino Uno, beherbergt drei Schilde und ist mit folgenden Schnittstellen verbunden:
- MOTORFAHRER
- RELAYBOARD-KANAL
- DC/DC-Wandler verstärken
Das auf Arduino montierte Schild ist das Motorschild zur Steuerung der drei Linearmotoren, die die Bewegung der Klinge steuern, und des PS2SHIELD, mit dem Sie sich mit der PlayStation 2 (PS2) verbinden können; Letzteres erfordert den RX-PS2, einen 2,4-GHz-Funkempfänger zum Senden/Empfangen bestimmter Befehle von der oben genannten Konsole. Den Schaltplan des Roboters finden Sie auf diesen Seiten; Die Stromquelle besteht aus einer Reihe von zwei Blei-Gel-Batterien mit 7,2 Ah:Wir nehmen die 12 V von der Mittelpunktverbindung der beiden, während wir zwischen dem Minus und dem Plus der Reihe 24 Volt nehmen. Ein Schalter (125V, 2×15 Ampere) steuert die beiden Versorgungsleitungen. Mit 12 Volt betreiben wir Arduino, das die Schilde über seine Stiftleiste mit Strom versorgt; eine LED (die den Begrenzungswiderstand intern montiert) zeigt an, wenn Arduino läuft.
Die 12 Volt direkt aus dem Batteriestapel speisen auch den Leistungsteil des Motorschilds. Da die Stromaufnahme der drei Linearantriebe (cod. LACT2) hoch ist, ist es tatsächlich nicht ratsam, die 12 V von Arduino zu nehmen:Sie entscheiden sich dafür, die externe Stromversorgung an der entsprechenden PWR-Klemme bereitzustellen. Um die externe Stromversorgung zu verwenden, müssen Sie den Jumper (auf der Abschirmung) in der Nähe des Terminals zwischen der Zentrale und dem EXT verschieben. Die Verwaltung des Shields erfordert eine spezielle Bibliothek für Arduino, die mit der Komponente geliefert wird. Jeder Linearaktuator besteht aus einem 12-V-Gleichstrom-Getriebemotor mit einer Schneckenschraube, um eine Welle entlang ihrer Länge hin und her zu bewegen (maximale Auslenkung von 5 cm).
Der Aktuator hat eine dynamische Belastung von 50 kg und eine maximale Geschwindigkeit von 1,3 cm/s. Es ist in der Lage, bis zu 250 kg zu tragen, wenn es nicht bewegt wird, und das Drehmoment gewährleistet die Beibehaltung der Position der Welle auch bei Stromausfall. Zwei Endschalter sorgen dafür, dass der Motor stoppt, wenn er die maximale Ausdehnung und Kontraktion erreicht, während die Dioden die Rückwärtsrichtung nach Erreichen des Grenzpunktes ermöglichen. Der Betätiger besteht aus Metall und ist zum Schutz vor Staub und Wasser abgedichtet (Schutzart IP63).
Wenden wir uns nun der 24-Volt-Versorgungsleitung zu, die den Leistungsteil des Schneepflugs speist, das sind die Traktions- und die Projektor- (optional) Abschnitte:Die erste basiert auf dem Motortreiber, der mit vier Drähten an die gleiche Anzahl von Arduino-Digitalleitungen. Der Motortreiber ist ein Doppelbrücken-Leistungstreiber, der zwei Bürstenmotoren kontinuierlich mit einer Spannung von max. 35 VDC und einem Strom von jeweils 15 A antreiben kann.
Durch die Anbindung an Arduino und die Verwendung von nur vier digitalen I / O (2 PWM) können Sie die Drehrichtung und Geschwindigkeit der Motoren auswählen. Die Schaltung verfügt über vier Steuerpins, vier LEDs, die die Drehrichtung der Motoren anzeigen, zwei Pins für die Stromversorgung der Platine (5 Vdc) und zwei Aluminium-Kühlkörper, die sich auf der Rückseite der gedruckten Schaltung befinden, um die während des Betriebs entstehende Wärme abzuleiten bei voller Leistung.
Für die Verwaltung des Treibers per Arduino stellt der Hersteller eine spezielle Bibliothek zur Verfügung. Die Ausgangsklemmen ermöglichen den Anschluss der beiden Lokomotiven, die wie in der Abbildung angegeben (Polarität nicht vertauschen, sonst Gleisverkehr!) mit Kabeln mit einem Querschnitt von mindestens 1,5 mm² zu verbinden. Bei den Steuereingängen sollte die Verbindung zwischen Arduino und dem Controller-Anschluss im Raster 2,54 beachtet werden; Korrespondenz, die bei der Verwendung der vom Hersteller bereitgestellten Bibliothek und unserer Firmware erforderlich ist:Wenn Sie diese bearbeiten, müssen Sie die Verbindungen überarbeiten.
Denken Sie daran, dass DIR die Logikpegel zum Einstellen der Motordrehrichtung sind und PWM die PWM-Signale sind, um die Leistungstreiber zu steuern. Zur Identifizierung der Steckerkontakte des Controllers genügt es, den daneben sichtbaren Siebdruck auf der Bestückungsseite der Platine zu beachten. Zusätzlich zur Motorsteuerung versorgen die 24 Volt den Abschnitt des LED-Projektors, den Sie montieren können oder nicht; Falls montiert, beachten Sie die angegebene Verkabelung und denken Sie daran, die positiven 24 V von der Relaiskarte (cod. RELAY1CH) zu nehmen. Letzteres beherbergt ein Relais und den jeweiligen Treibertransistor, der von Arduino über den Digital I/O 13 gesteuert wird; Arduino versorgt die Karte auch mit +5V und Masse (GND).
Ein Relais ermöglicht das Ein- und Ausschalten des Projektors, um Aktionen auf dem entsprechenden Stromkreis auszulösen. Der Projektor ist für den Betrieb mit 220 VAC ausgelegt, da diese Spannung am Roboter jedoch nicht verfügbar ist, haben wir den Projektor modifiziert, indem wir ihn geöffnet, AC / DC entfernt und die beiden Drähte der Power-LED direkt angeschlossen haben, um die Verwendung eines Wechselrichters zu vermeiden an den Ausgang des Wandlers DC / DC (cod. STEPUP30V); letzterer ist ein Schaltwandler mit einstellbarer Ausgangsspannung, der abgestimmt werden sollte, um der LED einen Strom zu liefern, der mit etwa 10 Watt arbeitet. Normalerweise wird dies bei etwa 30 Volt erreicht. Denken Sie jedoch daran, dass die Leistung durch das Produkt VxI gegeben wird (Strom durch Spannung, in Watt wird erhalten, wenn V in Volt und I in Ampere ist), dann sollte bei 30 V die Stromaufnahme knapp unter 340 mA liegen. Obwohl die LED-Gruppe intern gegen Überstrom geschützt ist, hat der STEPUP30V eine Begrenzung des Ausgangsstroms auf 2A, so dass es sinnvoll sein kann, ihn durch einen DC / DC mit Ausgangsstrombegrenzung zu ersetzen.
Das Empfangen von Daten von der Fernbedienung übernimmt das Shield PS2SHIELD, für das der Hersteller die spezielle Bibliothek zur Verfügung stellt. Der Schild führt den Empfang und die Dekodierung des Befehls durch; der Radioteil bleibt dem RX _PS2 überlassen, der in den entsprechenden Anschluss gesteckt wird. Das letzte, was zu beachten ist, ist der Fotowiderstand, der von Arduino verwendet wird, um die Umgebungsbeleuchtung zu erkennen und die Platine RELAY1CH so zu steuern, dass der LED-Projektor eingeschaltet wird; das Bauteil wird über einen Widerstand von 10 kOhm (1/4 W) dem Spannungsteiler zugeführt und vom analogen Eingang A0 Arduino ausgelesen. Die 5 Volt werden von Arduino 5V genommen. Dieser Lichtsensor macht eine einfache Sache:Bei guten Lichtverhältnissen ist der Widerstand des Fotowiderstands niedrig und die vom ADC des Arduino-Mikrocontrollers gelesene Spannung ist niedrig und löst die Relaisplatine nicht aus; Dunkelheit erhöht stattdessen den Widerstand stark und der ADC misst eine Spannung nahe 5 Volt, wodurch sich der Projektor einschaltet.
BAUANLEITUNG
KURZANLEITUNG
Code
- Skizze
SkizzeArduino
https://cdn.hackaday.io/files/869403719640960/Vittorio_Snowplow_Robot.zip
Schaltpläne
Herstellungsprozess