


Fahren des 28BYJ-48 Schrittmotors mit Joystick
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
Über dieses Projekt
Erforderliche Hardware:
- Arduino UNO-Board
- 28BYJ-48 Schrittmotor (mit ULN2003A Treiberplatine)
- Joystick
- 5V Stromquelle
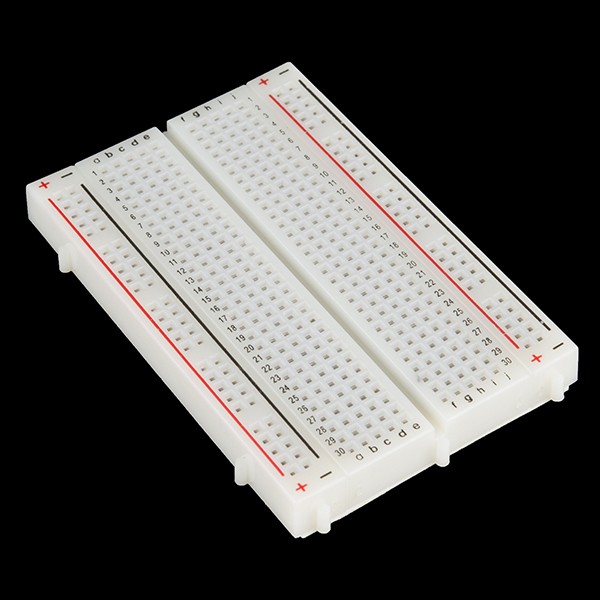
- Brotbrett
- Überbrückungsdrähte
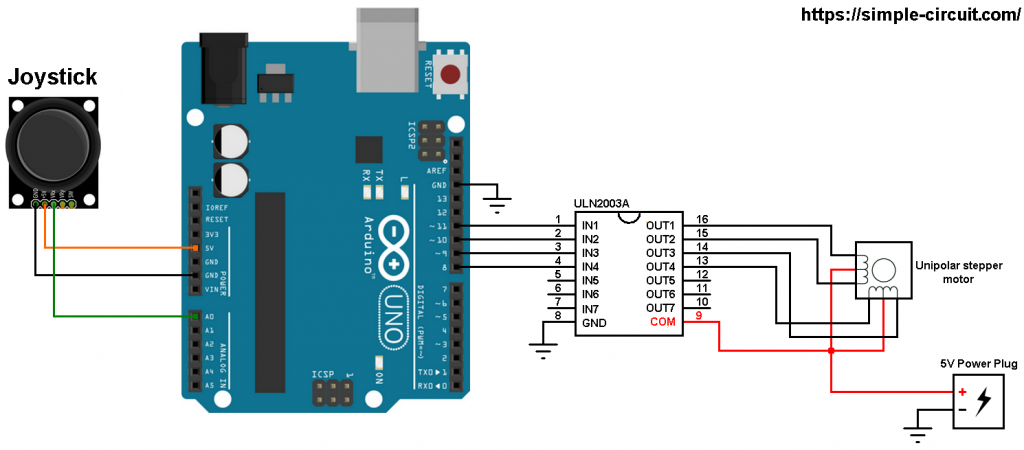
Schrittmotorsteuerung mit Arduino- und Joystick-Schaltung:Das schematische Diagramm der Projektschaltung ist unten gezeigt (alle geerdeten Anschlüsse sind miteinander verbunden).
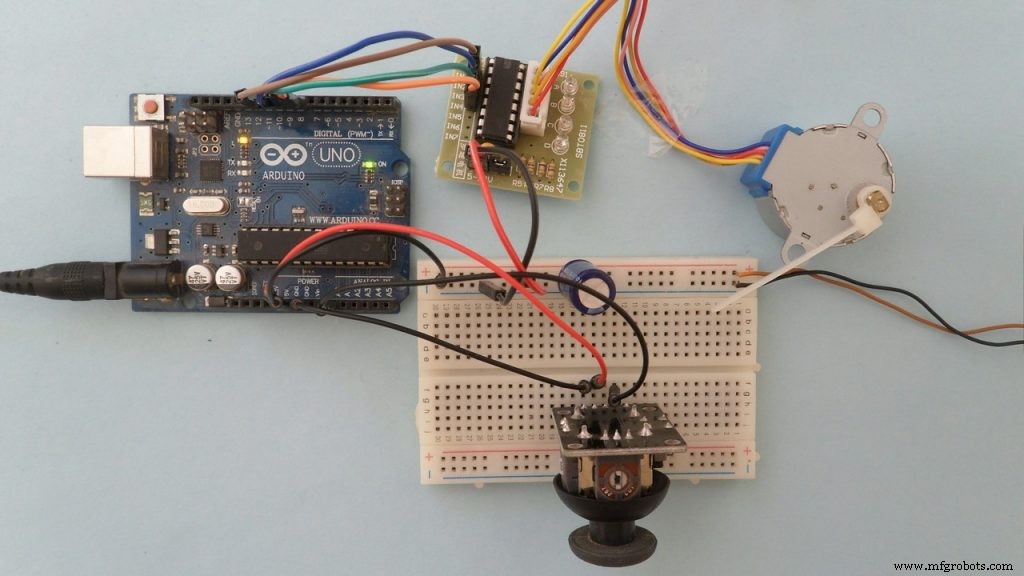
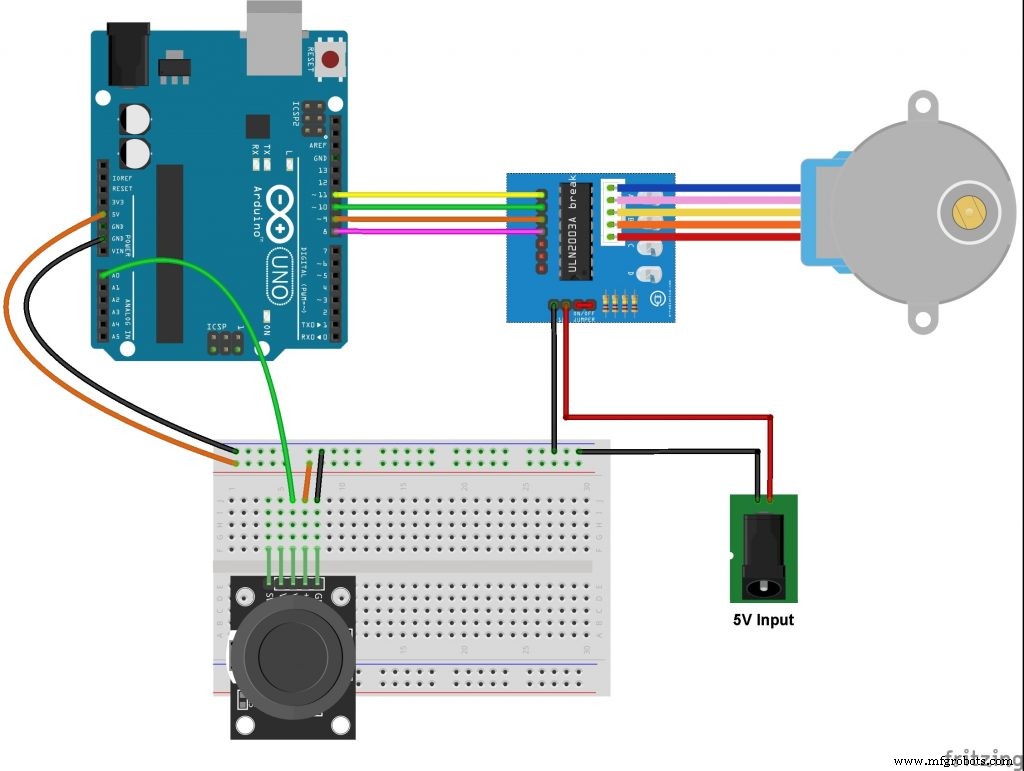
und das folgende Bild zeigt eine Fritzing-Schaltung:
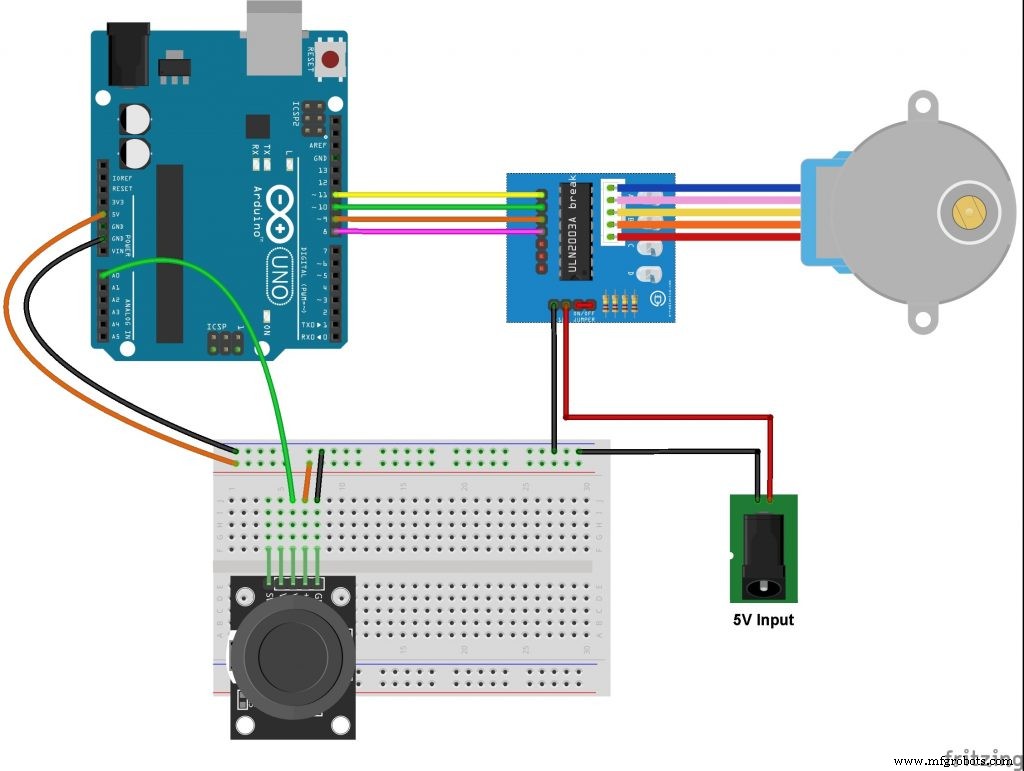
Der Schrittmotor ist an die ULN2003A-Platine angeschlossen, die mit einer externen Stromquelle von 5V versorgt wird. Die Steuerleitungen (IN1, IN2, IN3 und IN4) dieser Platine werden wie folgt mit dem Arduino verbunden:IN1 zum Arduino Pin 11IN2 zum Arduino Pin 10IN3 zum Arduino Pin 9IN4 zum Arduino Pin 8
Die Joystick-Platine hat 5 Pins:GND, +5V, VRX, VRY und SW wobei:GND und +5V Spannungsversorgungspins sindVRX ist der X-Achsen-PotentiometerausgangVRY ist der Y-Achsen-PotentiometerausgangSW ist der Druckknopfanschluss (der andere Anschluss ist mit GND verbunden). Der Ausgang des X-Achsen-Potentiometers (VRX) ist mit dem analogen Arduino-Pin A0 verbunden, der Y-Achsen-Potentiometerausgang (VRY) kann ebenfalls verwendet werden. Der Schaltstift (SW) wird in diesem Beispiel nicht verwendet. Mit den Potentiometern der X-Achse und der Y-Achse können wir zwei Schrittmotoren unabhängig voneinander steuern.
"Also Jungs wenn du Gefällt mir das Projekt, also vergiss nicht, ihm zu folgen und es zu mögen."
Code
- CODE:
CODE:C/C++
Bitte stellen Sie sicher, dass Sie alle Bibliotheken hinzufügen, die in diesem Code enthalten sind// Dieses Projekt wurde von BEASTIDREES62 erstellt https://id.arduino.cc/?code=MTxqeHweG6vL2cur&state=amxEcTB2bnNiYjluTUxmRExWAWZnOXIzUk1BLWRqZTZYUGtJNGtx%D3 Schrittmotorbibliothek#include// Definiere die Anzahl der Schritte pro Umdrehung#define STEPS 32 // Definiere Schrittmotorsteuerpins#define IN1 11#define IN2 10#define IN3 9#define IN4 8 // Initialisiere SchrittmotorbibliothekStepper Stepper (SCHRITTE, IN4, IN2, IN3, IN1); // Joystick-Poti-Ausgang ist mit Arduino A0 #define Joystick A0 verbunden Void setup () {} Void loop () { // Analogwert vom Potentiometer lesen Int val =analogRead (Joystick); // wenn sich der Joystic in der Mitte befindet ===> Stoppen Sie den Motor if ( (val> 500) &&(val <523) ) { DigitalWrite (IN1, LOW); digitalWrite (IN2, LOW); digitalWrite (IN3, LOW); digitalWrite (IN4, LOW); aufrechtzuerhalten. Sonst {// bewegen Sie den Motor in die erste Richtung, während (val>=523) {// die Drehzahl zwischen 5 und 500 U/min abbilden int speed_ =map(val, 523, 1023, 5, 500); // Motordrehzahl einstellen stepper.setSpeed (speed_); // den Motor bewegen (1 Schritt) stepper.step (1); val =analogRead (Joystick); } // Motor in die andere Richtung bewegen, während (val <=500) {// die Geschwindigkeit zwischen 5 und 500 U/min abbilden int speed_ =map(val, 500, 0, 5, 500); // Motordrehzahl einstellen stepper.setSpeed (speed_); // den Motor bewegen (1 Schritt) stepper.step (-1); val =analogRead (Joystick); } } }
Schaltpläne
Herstellungsprozess
- Motorsteuerkreise
- Schrittmotoren
- Glättung der Leistung des EV-Antriebsstrangs mit einem feldorientierten Regelalgorithmus
- Zutrittskontrolle mit QR, RFID und Temperaturüberprüfung
- Autonomer Nerf-Wachturm
- Münzprüfer mit Arduino steuern
- Bipolare Schrittmotorbibliothek
- Hindernisse vermeiden Roboter mit Servomotor
- Swiper - Auto Tinder/Bumble Swiper
- Drehmaschine mit CNC