


Bibliothek zur Steuerung von Gleichstrommotoren
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 4 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Hier präsentiere ich die Arduino-Bibliothek zur Steuerung des Gleichstrommotors. Die Bibliothek verfügt über so viele Einrichtungen und Flexibilität, dass sie jeden Gleichstrommotor in der erforderlichen Weise steuern kann. Die Bibliothek ist gemäß der Industrialmotion Control konzipiert Bedarf. Die Bibliothek verfügt über 16 verschiedene Funktionen, so dass sie den Motor auf vielseitigste Weise steuern kann.Hier ist die Liste der Einrichtungen in der Bibliothek
1. Es steuert die Drehrichtung des Motors
2. Es steuert die Geschwindigkeit des Motors von 0-100%
3. Es kann einen sanften Start bieten zum Motor in der angegebenen Zeit – bedeutet, dass die Motordrehzahl von 0% auf das gewünschte Niveau in der angegebenen Zeit ansteigt
4. Es kann einen sanften Stopp bieten zum Motor in der angegebenen Zeit - bedeutet, dass die Motordrehzahl von der aktuellen Geschwindigkeit auf 0% in der angegebenen Zeit sinkt
5. Es kann Jog-Steuerung apply anwenden zum Motor in beide Richtungen – bedeutet, dass der Motor in die angegebene Richtung ruckelt
6. Es kann DC BREAK (bedeutet sofortigen oder Not-AUS) auf den Motor anwenden
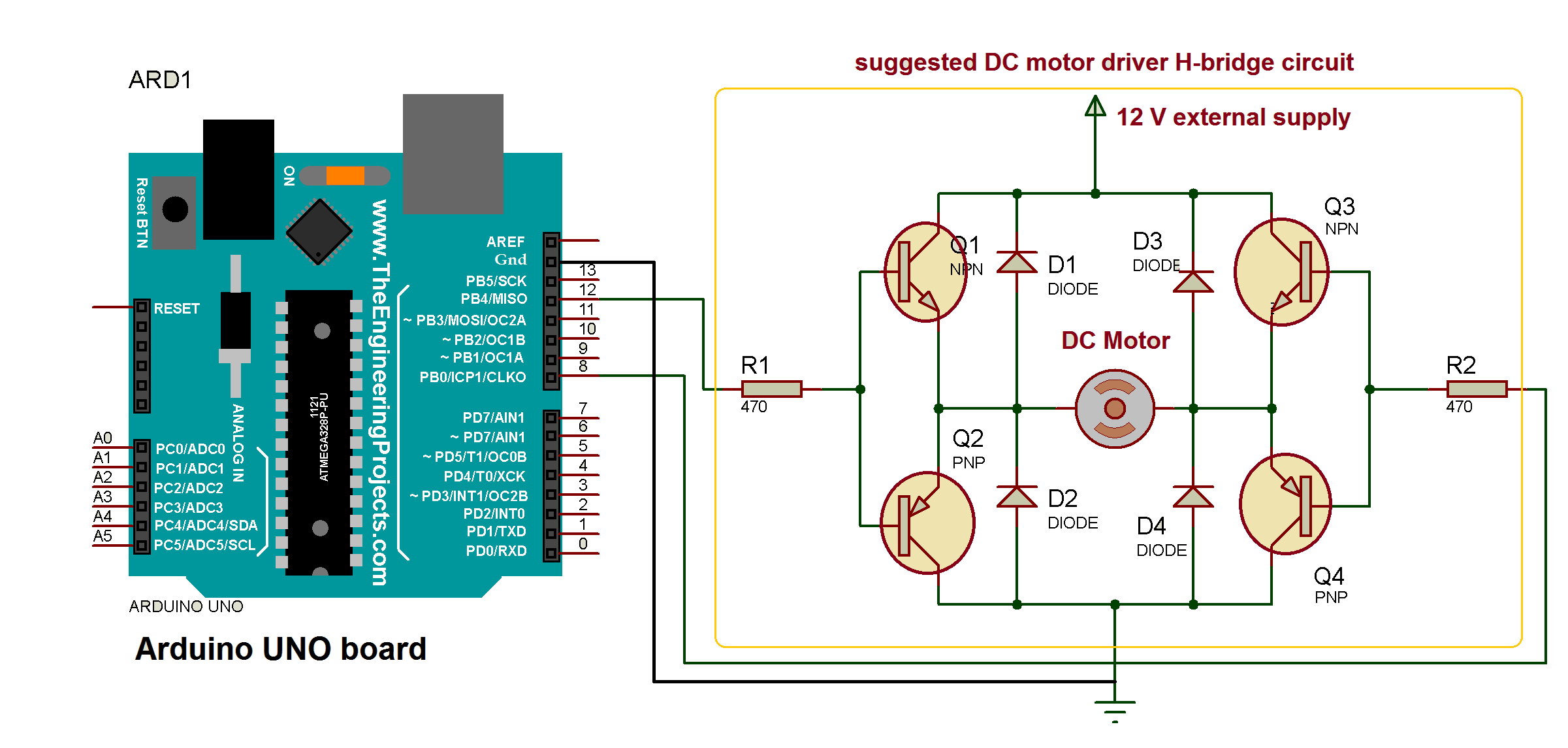
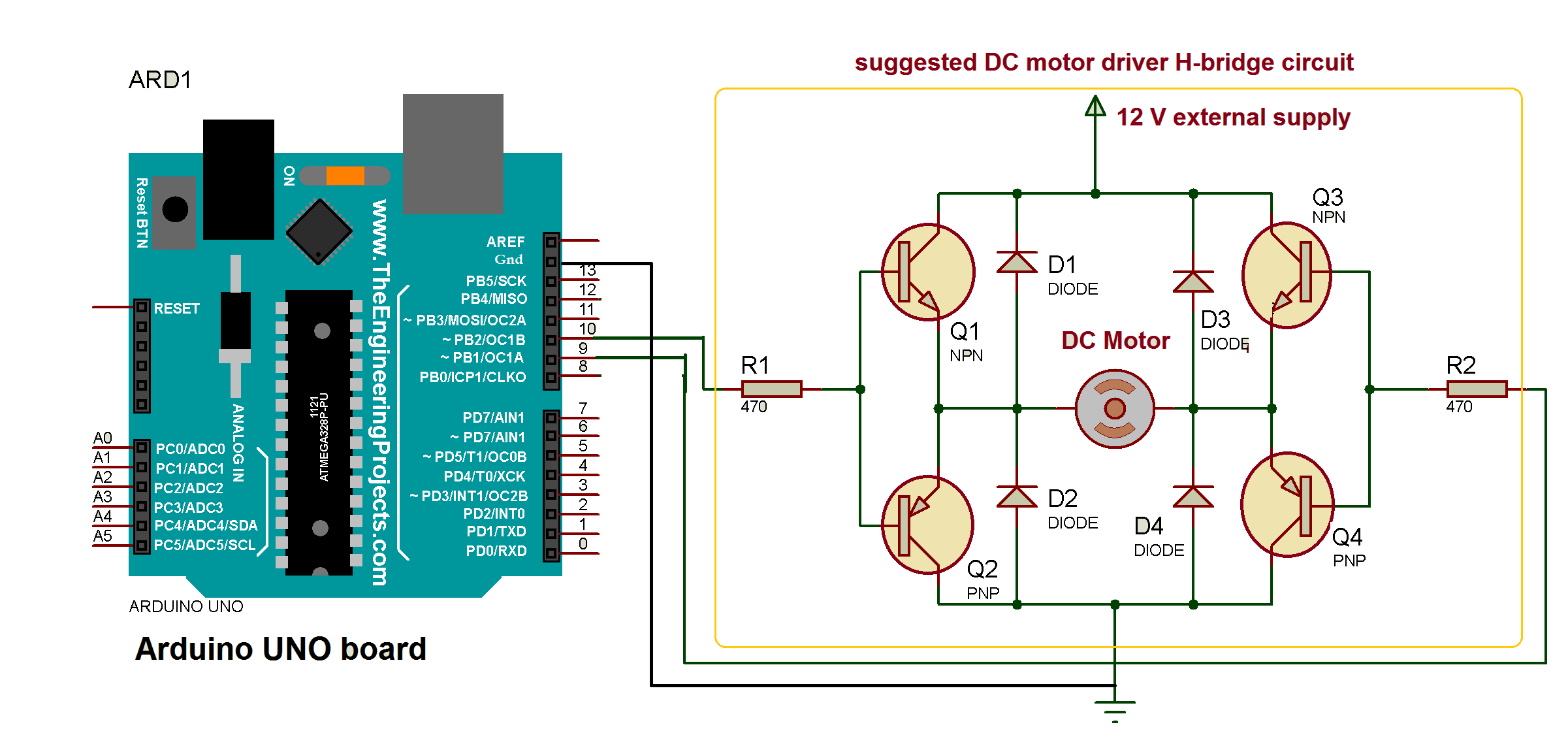
Hier finden Sie die Kurzbeschreibungen aller Bibliotheksfunktionen. Anschließend werden einige Beispiele gegeben, die erklären, wie der Motor mit dieser Bibliothek gesteuert wird. Es gibt drei Videos, die die Demonstration dieser Beispiele zeigen. Schließlich wird die Schaltung vorgeschlagen, die eine H-Brückenschaltung verwendet, die häufig zur Steuerung von Gleichstrommotoren verwendet wird.
Um diese Bibliothek in Ihrer Arduino-Skizze zu verwenden, kopieren Sie einfach den DC_Motor Ordner in das Stammverzeichnis des Arduino-Bibliotheksordners wie C:\arduino-1.6.7\libraries
Beschreibung der Bibliotheksfunktionen:
1. DC_Motor(int pin1, int pin2): Diese Funktion deklariert Arduino-Pins, die den Gleichstrommotor antreiben
2. DC_Motor(int pin1, int pin2, int speed_flag): Diese Funktion deklariert analoge Ausgangspins von Arduino, die den Gleichstrommotor antreiben
3. start_motor(int dir): Diese Funktion startet die Drehung des Motors in die angegebene Richtung. Wenn die Richtung 1 ist, beginnt der Motor, sich vorwärts zu drehen und umgekehrt
4. vorwärts(): diese Funktion startet die Drehung des Motors in Vorwärtsrichtung
5. umgekehrt(): diese Funktion startet den Motor in umgekehrter Richtung
6. dc_break(): diese Funktion stoppt sofort den rotierenden Motor*
7. stop_motor(): diese Funktion stoppt den drehenden Motor
8. jogg_full_speed(int dir) : diese Funktion wird den Motor 5 Sekunden lang bei voller Geschwindigkeit in die gewünschte Richtung ruckeln
*Hinweis:- Diese Funktion funktioniert nur, wenn der Gleichstrommotor über interne Vorkehrungen für eine solche Gleichstromunterbrechung verfügt. Außerdem muss eine geeignete Motortreiberschaltung mit dynamischen Bremswiderständen (DBR) ausgelegt werden und es muss vollständig darauf geachtet werden, dass der Motor oder die Schaltung nicht beschädigt wird.
Alle oben genannten Funktionen bieten eine einfache Steuerung des Gleichstrommotors. Sie steuern nicht die Drehzahl des Motors. Die nächsten 8 Funktionen steuern sowohl die Geschwindigkeit als auch die Richtung des Motors. Es ist jedoch erforderlich, analoge Ausgangspins von Arduino auszuwählen, um diese Funktionen zu verwenden. Der Gleichstrommotor muss mit der 2. Funktion zusammen mit dem Geschwindigkeitsflag auf 1 initialisiert werden
9. set_speed(int speed): diese Funktion stellt die Drehzahl des Gleichstrommotors zwischen 0 und 100 % ein
10. forward_with_set_speed(): diese Funktion beginnt, den Gleichstrommotor mit der eingestellten Geschwindigkeit vorwärts zu drehen
11. reverse_with_set_speed(): diese Funktion beginnt mit der Rückwärtsdrehung des Gleichstrommotors mit der eingestellten Geschwindigkeit
12. run_motor(int dir, int speed): diese Funktion dreht den Gleichstrommotor mit der eingestellten Geschwindigkeit in beide Richtungen
13. jogg_set_speed(int dir, int speed): diese Funktion wird den Motor bei der eingestellten Geschwindigkeit in beide Richtungen ruckeln
14. motor_speed_zero()*: die Funktion reduziert die Motordrehzahl auf 0 – bedeutet das Stoppen des Motors
15. soft_start(int dir, int speed, inttime_in_sec) : Diese Funktion erhöht die Motordrehzahl von 0 auf das gewünschte Niveau in einer bestimmten Zeit in beide Richtungen. Die Zeit muss in Sekunden ausgewählt werden
16. smooth_stop(int time_in_sec): Diese Funktion reduziert die Motordrehzahl von der aktuellen Betriebsdrehzahl in einer bestimmten Zeit auf 0. Die Zeit muss in Sekunden ausgewählt werden
*Hinweis:Die Funktion stop_motor() kann hier nicht verwendet werden, da sie einen digitalen Ausgang liefert, während diese Funktion einen minimalen analogen Ausgang liefert, um die DC-Motordrehzahl auf Null zu setzen. Wenn Sie den Gleichstrommotor mit Drehzahl steuern, stoppen Sie den Motor nicht nur, sondern stellen Sie seine Drehzahl auf Null.
Beispiele:
1) Gleichstrommotor mit voller Geschwindigkeit vorwärts und rückwärts drehen (keine Geschwindigkeitssteuerung)
/*dieses Programm dreht den DC-Motor für 5 Sekunden vorwärts
dann für 2 Sek. anhalten und den Motor erneut für
. rückwärts drehen5 Sek., 2 Sek. kontinuierlich stoppen
erstellt von A M Bhatt (+91-9998476150), Gujarat, INDIEN
am 10.12.2016
*/
#include
DC_Motormotor(8, 12);
voidsetup()
{
}
Leere Schleife()
{
motor.forward();
Verzögerung(5000);
motor.stop_motor();
Verzögerung(2000);
motor.reverse();
Verzögerung(5000);
motor.stop_motor();
Verzögerung(2000);
}
2) Gleichstrommotor mit eingestellter Geschwindigkeit vorwärts und rückwärts drehen (mit Geschwindigkeitssteuerung)
/*dieses Programm dreht den DC-Motor für 5 Sekunden vorwärts
bei 40 % Geschwindigkeit, dann für 2 Sekunden anhalten und den Motor erneut für
. rückwärts drehen5 Sek. bei 80 % Geschwindigkeit kontinuierlich
erstellt von A M Bhatt (+91-9998476150), Gujarat, INDIEN
am 10.12.2016
*/
#include
DC_Motor motor2(9, 10, 1);
voidsetup()
{
}
Leere Schleife()
{
motor2.set_speed(40);
motor2.forward_with_set_speed();
Verzögerung(5000);
motor2.motor_speed_zero();
Verzögerung(2000);
motor2.set_speed(80);
motor2.reverse_with_set_speed();
Verzögerung(5000);
motor2.motor_speed_zero();
Verzögerung(2000);
}
3) Wenden Sie den Motor in beide Richtungen mit und ohne Geschwindigkeitsregelung an
/*Dieses Programm wendet Jog auf zwei verschiedene Gleichstrommotoren an
* es wendet Jog auf den 1. Motor mit voller Geschwindigkeit in beide Richtungen an
* und liefert dann den zweiten Motor mit 80 % Geschwindigkeit im Rückwärtsgang
* Fahrtrichtung und 30% Geschwindigkeit in Vorwärtsrichtung
* erstellt von Ashutosh M Bhatt(+91-9998476150), Gujarat (INDIEN)
* am 22.10.2016
*/
#include
DC_Motor Motor (8, 12);
DC_Motor motor2(9, 10, 1);
voidsetup()
{
}
voidloop()
{
motor.jogg_full_speed(1);
motor.jogg_full_speed(0);
motor2.jogg_set_speed(0, 80);
motor2.jogg_set_speed(1, 30);
}
4) Wenden Sie einen sanften Start und einen sanften Stopp auf den Motor an
/*Dieses Programm gibt dem Motor einen sanften Start und erhöht seine Geschwindigkeit
von 0 auf 90 % in 10 Sek. in Vorwärtsrichtung
dann erfolgt ein sanfter Stopp von 90% auf 0 in 5 Sekunden
wieder Softstart von 0 auf 50% in 6 Sek. in Rückwärtsrichtung
und schließlich sanfter Stopp von 50% auf 0 in 3 Sekunden
erstellt von A M Bhatt (+91-9998476150), Gujarat, INDIEN
am 10.12.2016
*/
#include
DC_Motor motor2(9, 10, 1);
voidsetup()
{
}
voidloop()
{
motor2.soft_start(1, 90, 10);
Verzögerung(3000);
motor2.smooth_stop(5);
motor2.soft_start(0, 50, 6);
Verzögerung(3000);
motor2.smooth_stop(3);
}
Code
- Bibliothek zur Steuerung von Gleichstrommotoren
Bibliothek zur Steuerung von DC-MotorenC-Header-Datei
Diese Bibliothek steuert Geschwindigkeit und Richtung aller Arten von Gleichstrommotoren.Keine Vorschau (nur Download).
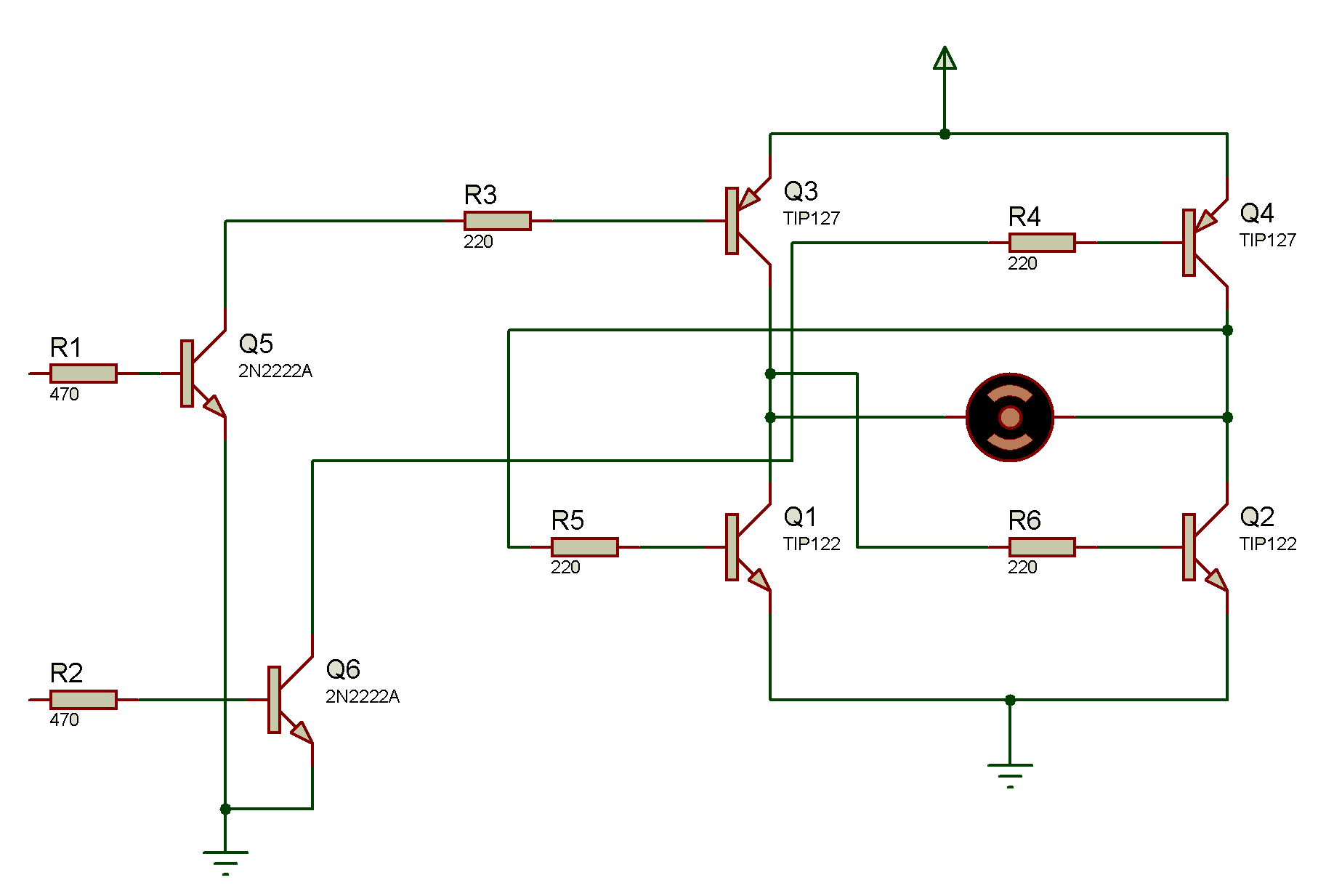
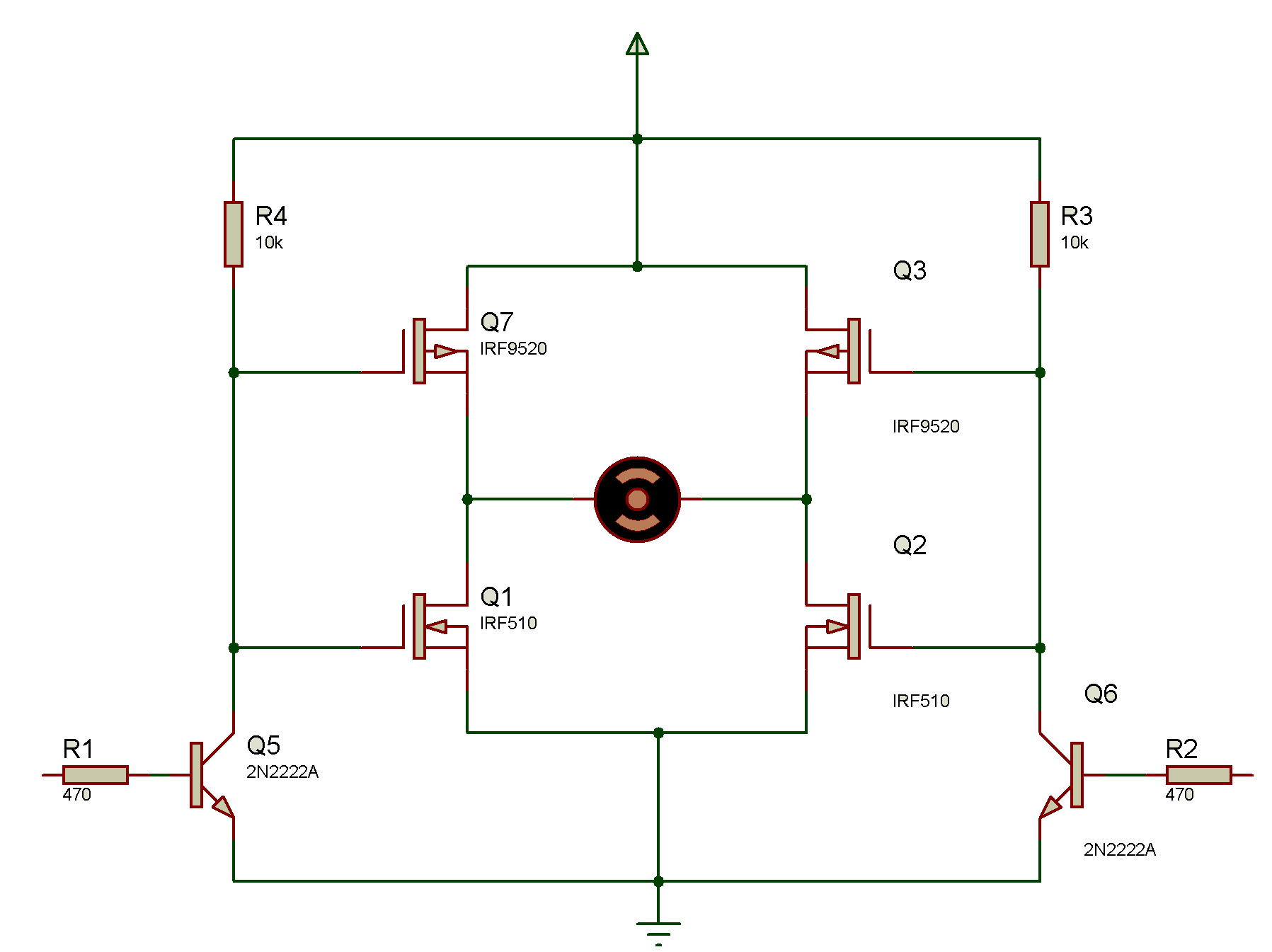
Schaltpläne
Arduino UNO- und H-Brückentreiber zur Steuerung des DC-Motors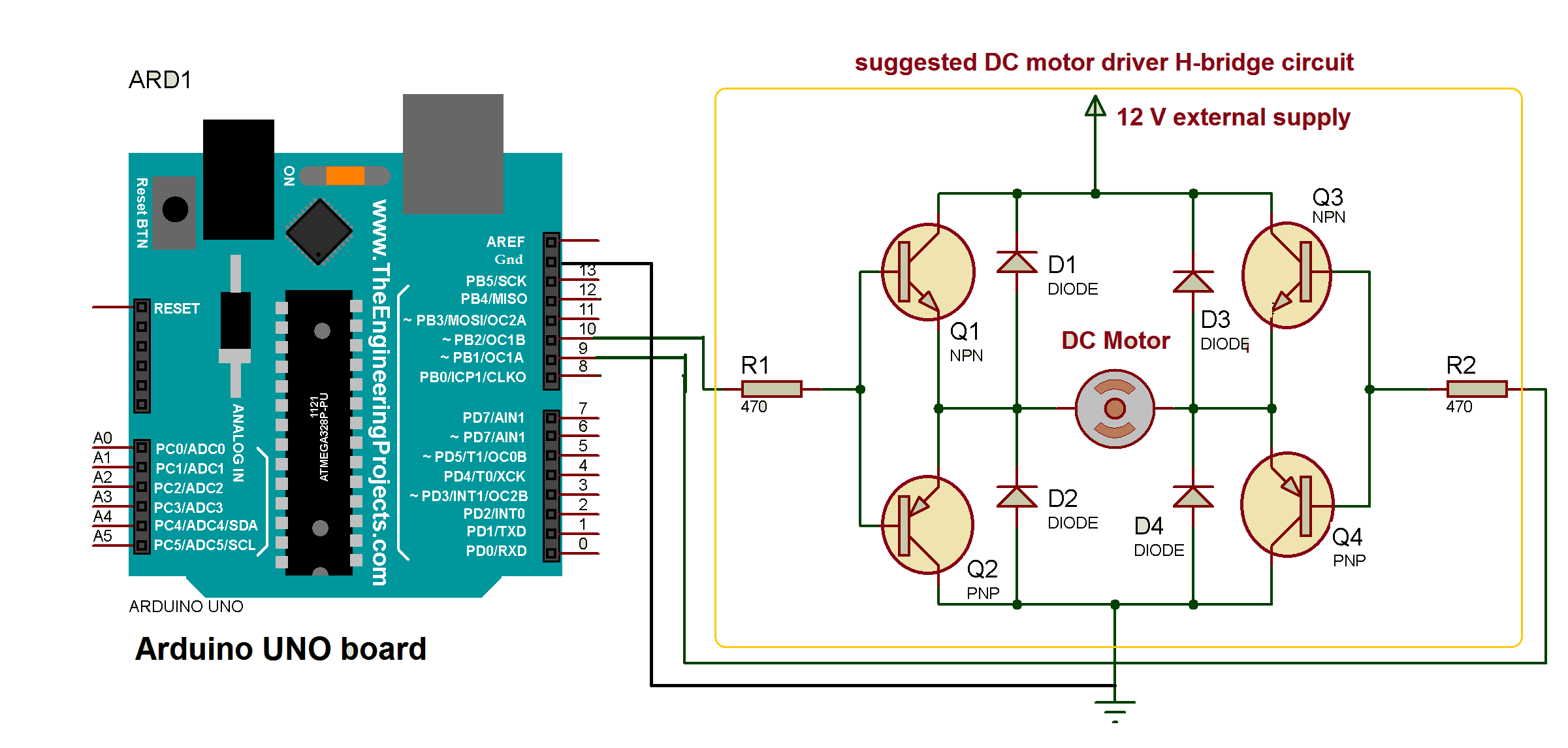
Herstellungsprozess
- Kontrollieren eines Effekts mit echten Sensoren
- Machen Sie eine DIY-Hausaufgaben-Schreibmaschine zu Hause
- Robotersystem zur Erkennung von Menschen mit Arduino Uno
- Bipolare Schrittmotorbibliothek
- Android-gesteuertes Spielzeug mit Raspberry Motor Shield
- Hindernisse vermeiden Roboter mit Servomotor
- Linienfolger-Roboter
- Steuerung eines Roomba-Roboters mit Arduino und Android-Gerät
- Steuerung des Servomotors mit Arduino und MPU6050
- Roboter für supercoole Indoor-Navigation