


Arduino IoT-Roboterarm
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 5 |
Apps und Onlinedienste
 |
| |||
 |
|
Über dieses Projekt
Dies ist mein erster Roboterarm mit den folgenden Funktionen:
- 5DOF-Roboter, eigentlich 4, wenn wir den Greifer ausschließen
- das Gehirn ist ein Arduino Yun mit IoT-Fähigkeiten
- die Steuerschnittstelle ist in die Blynk-App integriert
- Vorwärtskinematik wird in Matlab mit der Robotics Toolbox implementiert
- eine neue Bibliothek, die ich geschrieben habe, die eine reibungslose Bewegung realisiert
Ich bin mit dem Ergebnis sehr zufrieden. Daher möchte ich meine Erfahrungen und den Aufbau mit Ihnen teilen.
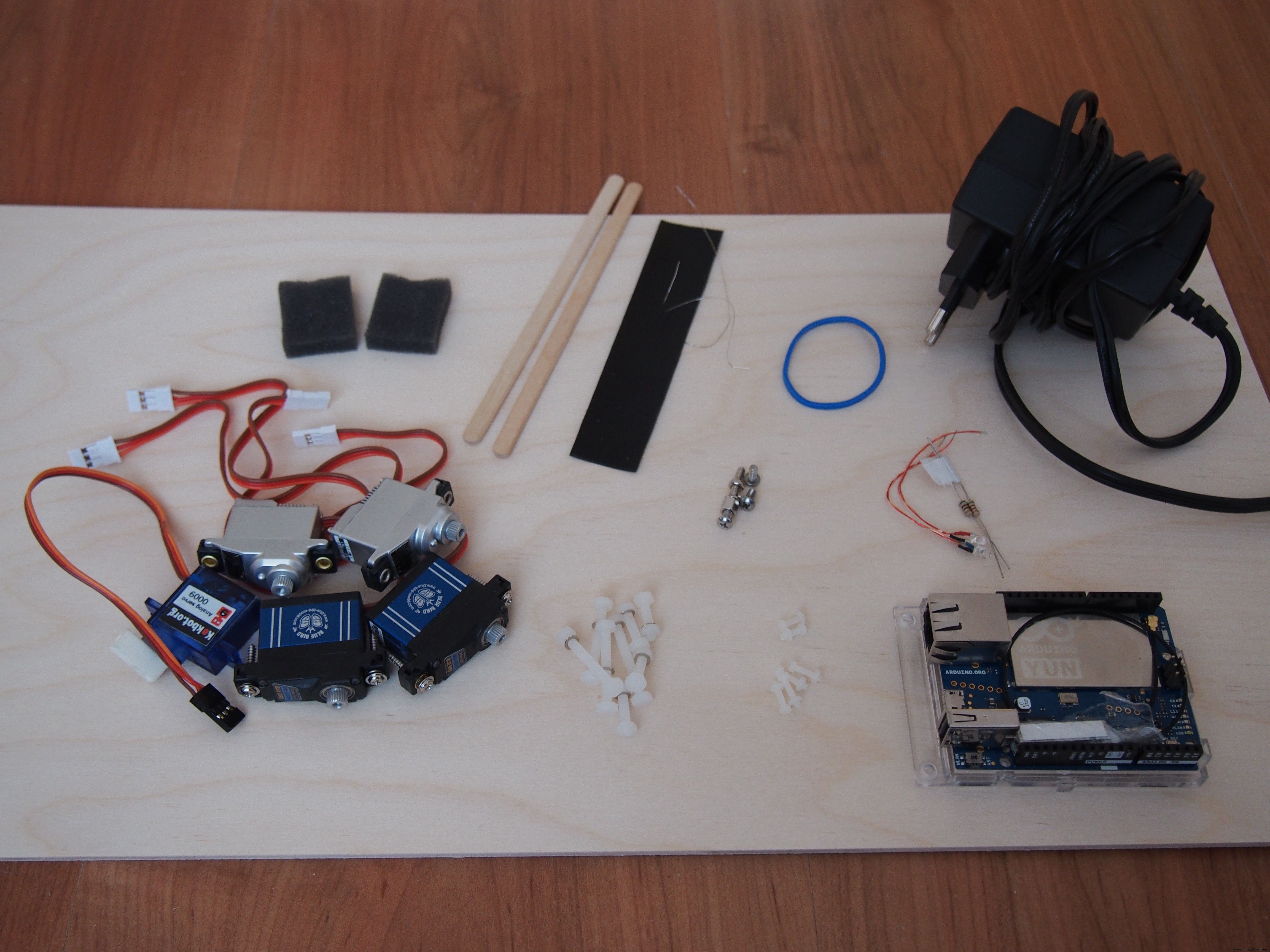
Komponenten &Materialien
Um den Roboter zu bauen, benötigen Sie:
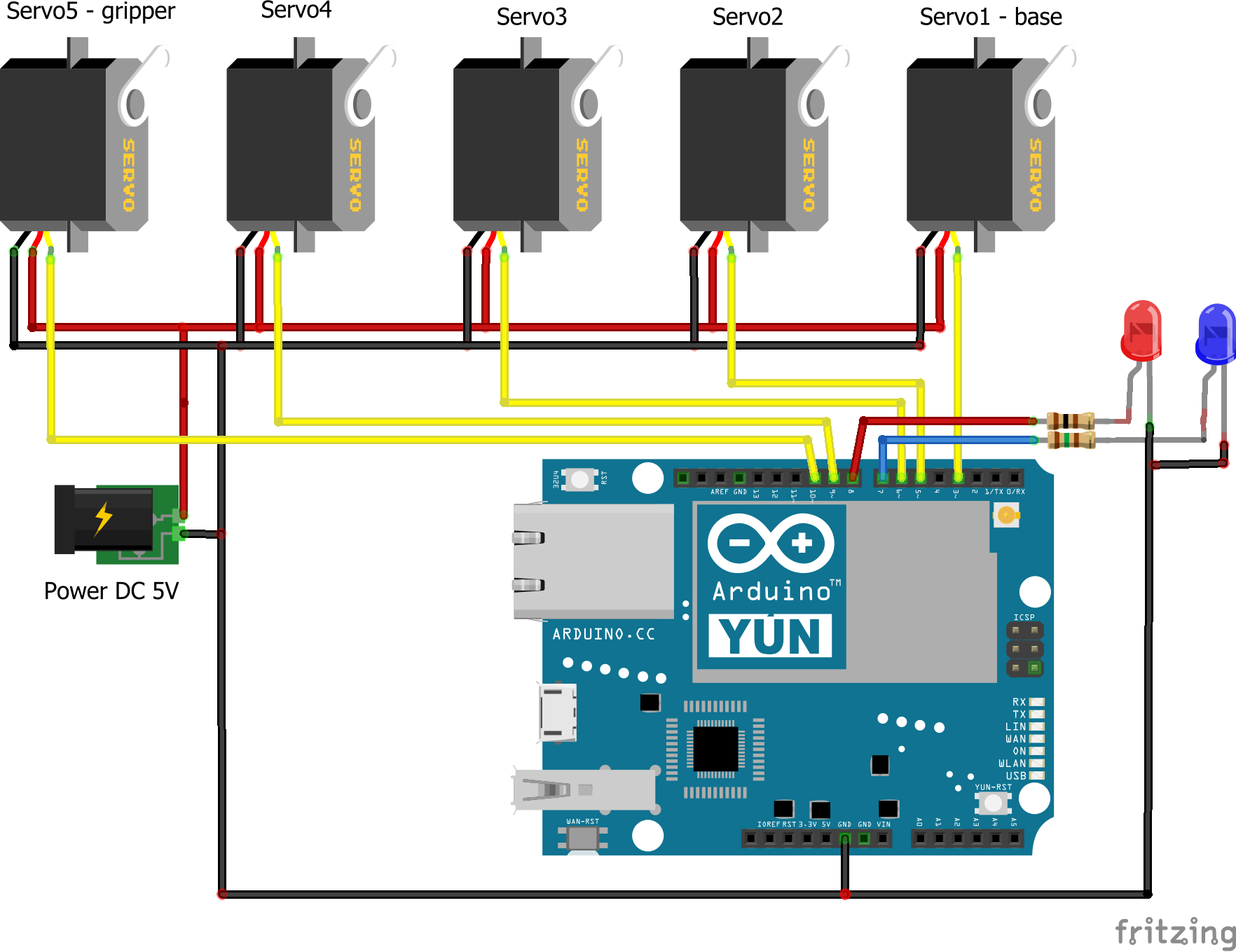
- 1 x Arduino Yun (oder ein beliebiges Arduino-Board)
- 5 x Servomotoren
- 1 x 5V-Ladegerät, min 2,5 A
- 2 x LEDs
- 2 x Widerstände, 100 Ohm (für rote LED) bzw. 150 Ohm (für blaue LED)
- 2 x Holzmischstäbchen
- 1 x Metalldraht (oder ähnlich)
- 1 x Plastikfolie (ich habe sie aus einer Duschgelflasche genommen)
- 1 x Gummiband
- 2 x kleine Schwämme (siehe linke obere Ecke)
- 9 x M3-Kunststoffschrauben
- 6 x M2,5-Kunststoffschrauben
- 1 x Holzplatte 3mm (30cm x 50cm sollte mehr als ausreichend sein)
- 1 x Holzleim
- Zeit zum Codieren
Bau des Roboters
Um den Roboter zu bauen, messen Sie zunächst die Größe der Servos und überprüfen Sie das Drehmoment der Servos. Dies gibt Ihnen einen Hinweis auf die Größe der Arme und schließlich die Größe des Roboters. In meinem Fall habe ich 2 verschiedene Micro-High-Torque-Servos bestellt:erstes Paar und zweites Paar. Diese können bis zu 140 Grad bewegen, obwohl sie für 120 Grad spezifiziert sind. Ich empfehle jedoch, 180-Grad-Servos zu kaufen, um mehr Verfahrwinkel zu haben.
Für den Greifer wird kein High-Torque-Servo benötigt. Das billigste Mikro-Servo bei ebay kann die Arbeit erledigen.
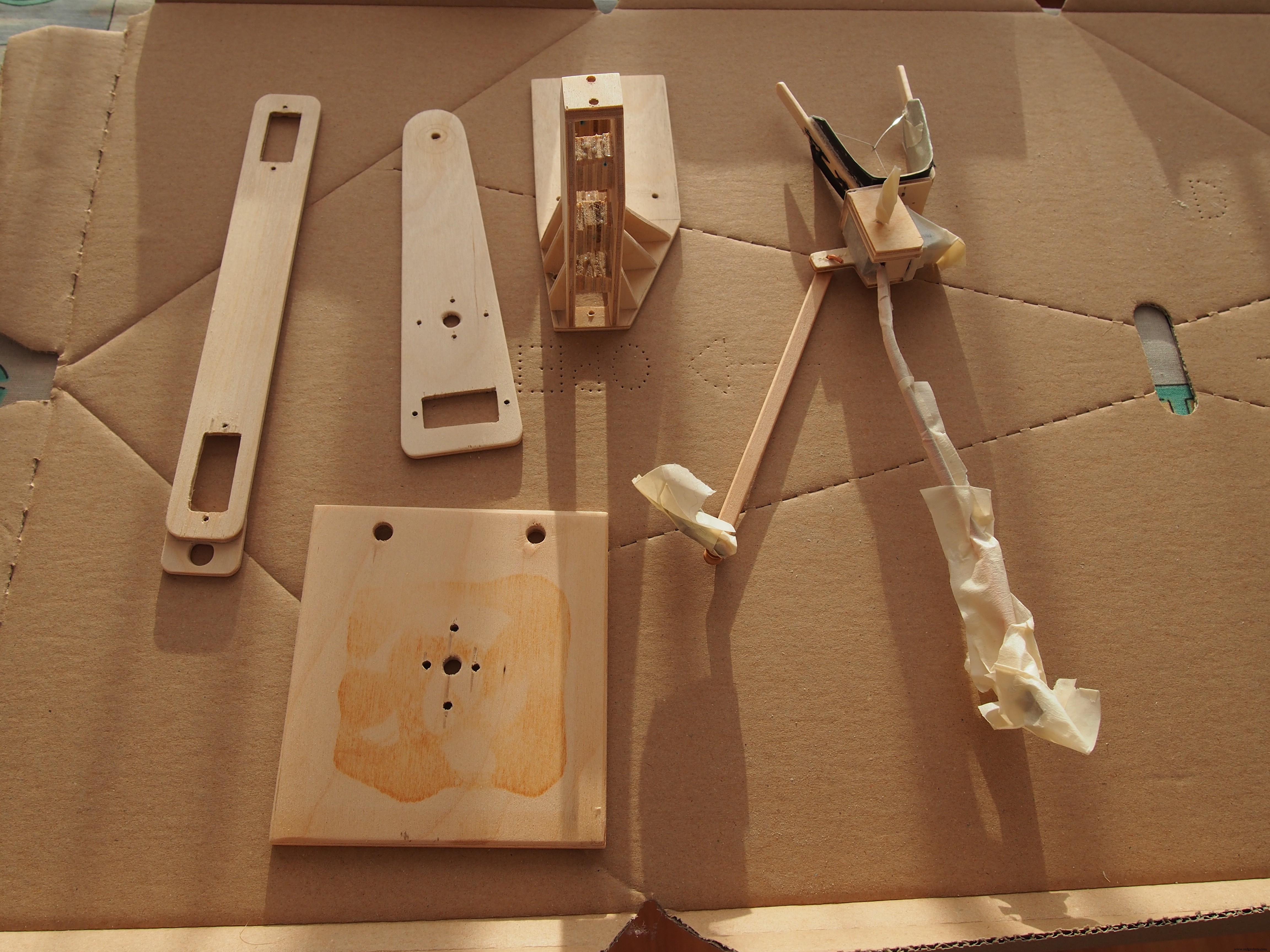
Beginnen Sie mit dem Schneiden der Arme, wie Sie in Foto 1 sehen. Hier können Sie kreativ sein, es gibt kein festes Design, Sie können Ihr eigenes Design entwickeln. Bauen Sie dann den Greifer mit einem halbierten Mischstab und der Plastikfolie als Federrückzug. Mit an der Innenseite angeschlossenen Drähten können Sie den Greifer schließen und öffnen. Für meinen Roboter habe ich eine M3-Schraube verwendet, um den Greifer zu drehen. Das Schwenken des Greifers erfolgt durch ein Servo, das sich auf der anderen Seite des Arms befindet, um einen Gewichtsausgleich zu erreichen. Die Kraftübertragung erfolgt über einen weiteren Mischstab (siehe Foto 2, Oberseite des Roboters).
Als nächstes bauen Sie die Basis und die Platte, die das Basisservo und das Arduino Yun-Board (oder ein anderes Board) hält. Setzen Sie alles zusammen und Sie sollten etwas wie in Foto 2 haben.
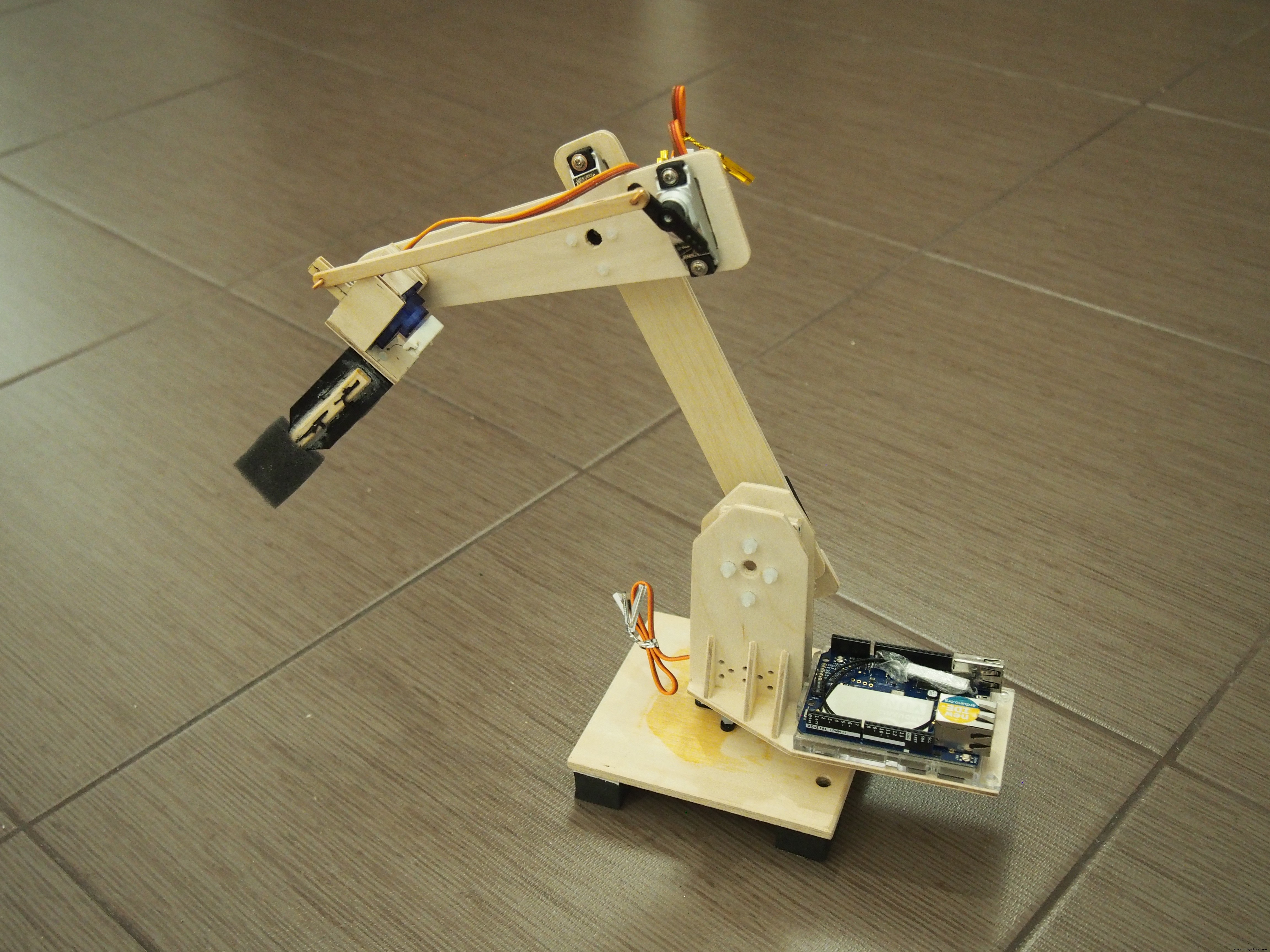
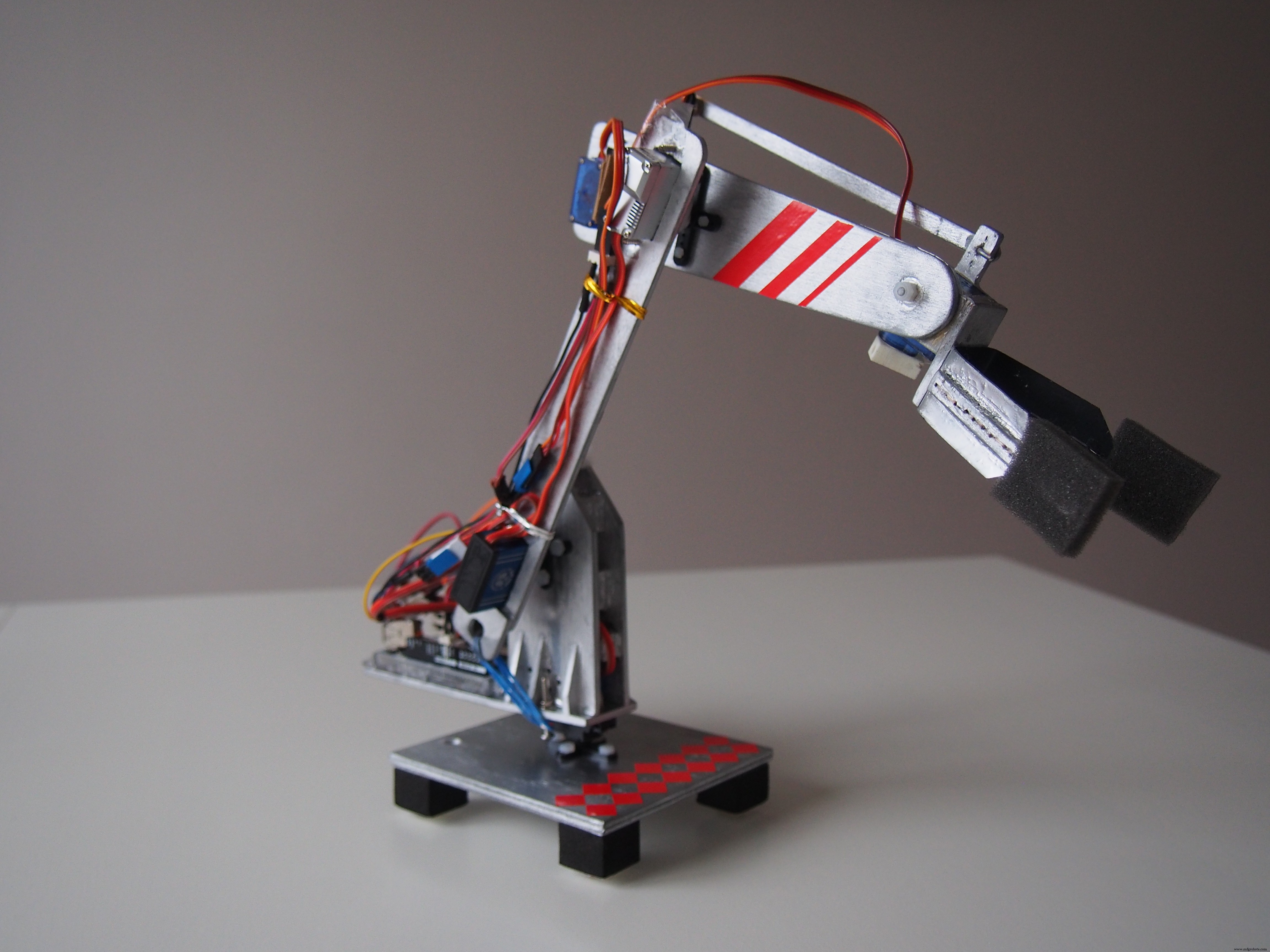
Wenn Sie ein besser aussehendes Design wünschen, schleifen Sie die Holzkomponenten und lackieren Sie sie (wie in Foto 3) mit Ihrer bevorzugten Farbe. Für meinen Roboter entschied ich mich für eine silberne Farbe (um Metall zu imitieren) mit roten Streifen. Das Endergebnis ist in Foto 4 zu sehen.

Software
Für die Software habe ich zunächst eine Schnittstelle in Blynk erstellt. Wenn Sie Blynk noch nicht verwendet haben, überprüfen Sie bitte deren Website, wie das geht. Sollte sehr einfach und unkompliziert sein.
Hinweis: Wenn Sie kein Board haben, das sich mit dem Internet verbinden kann, können Sie Blynk trotzdem mit einem normalen Board, z. B. Arduino Uno, über den USB-Anschluss verwenden. Lesen Sie dazu hier.
Als nächstes gehen wir zur Arduino IDE und schreiben etwas Code. Der Einfachheit halber habe ich den Code angehängt, damit Sie ihn einfach verwenden können :) Um ihn auszuführen, müssen Sie Folgendes tun:
- Konfigurieren Sie das Arduino Yun-Board.
- Installieren Sie die Blynk-Bibliothek in Ihrer Arduino-IDE, indem Sie zu Sketch>Bibliothek einschließen>Bibliotheken verwalten gehen, nach Blynk suchen und sie installieren.
- Fügen Sie die SimpleTimer-Bibliothek in einem Ordner mit dem Namen SimpleTimer zu Ihrem Arduino-Bibliotheksordner hinzu, normalerweise Arduino\libraries\
- Fügen Sie die von mir geschriebene MotionGenerator-Bibliothek in einem Ordner mit dem Namen MotionGenerator zum Arduino-Bibliotheksordner hinzu
- RobotArm_instructables.ino kompilieren und hochladen (Hinweis:Vergessen Sie nicht, Ihren Blynk-Token zu aktualisieren)
Hinweis: Die MotionGenerator-Bibliothek ist eine analysebasierte Lösung, die Ihnen reibungslose, schöne Übergänge von einem Punkt zum anderen ermöglicht. Es erlaubt Begrenzungen der maximalen Geschwindigkeit und Beschleunigung.
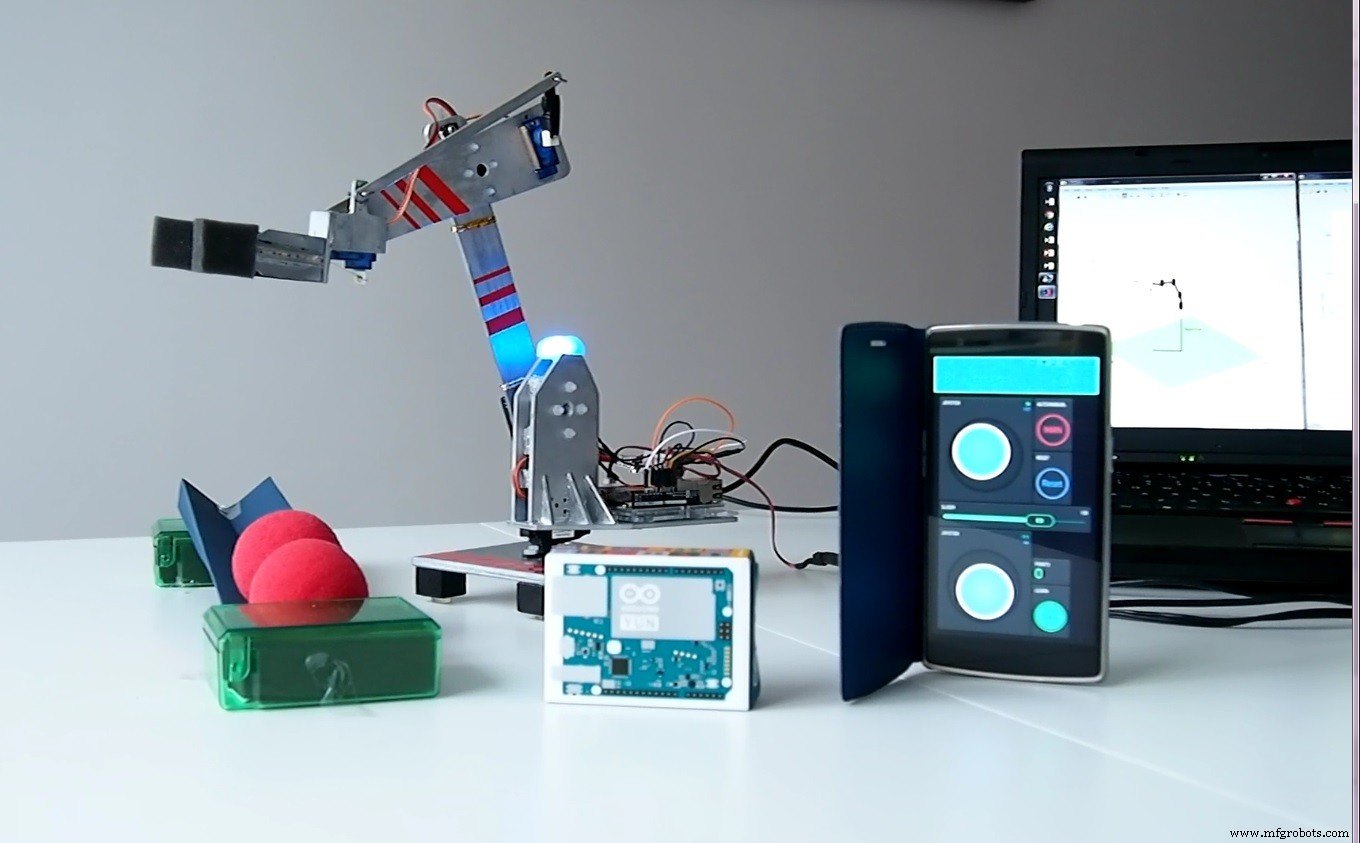

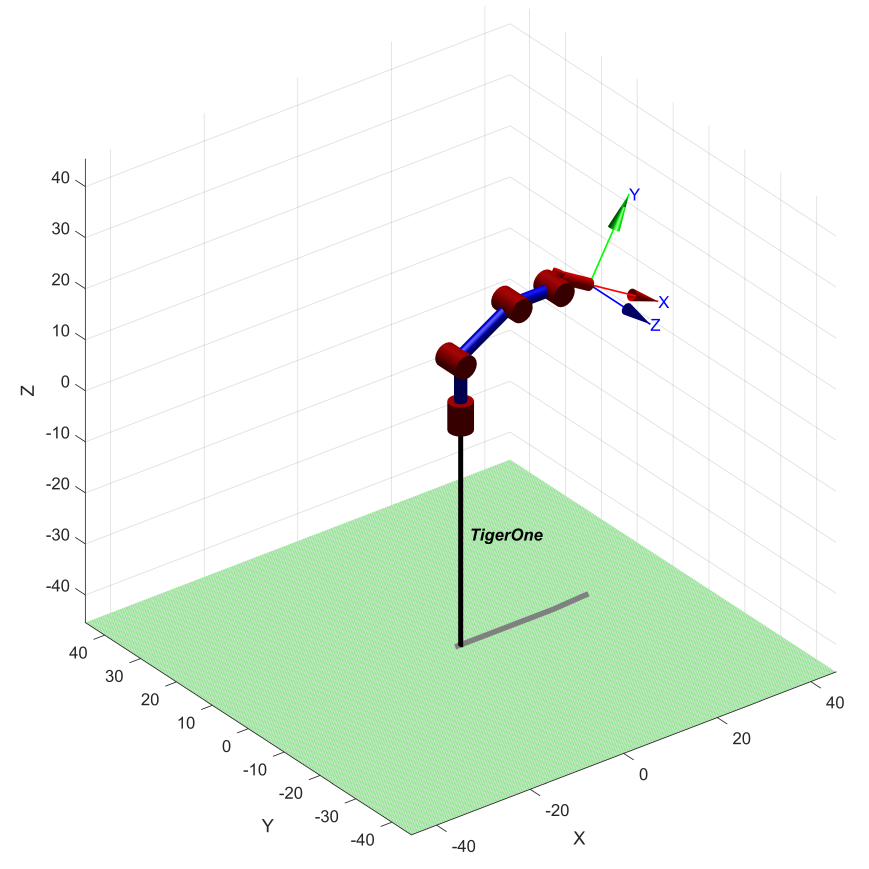
Optional (Vorwärtskinematik, siehe Foto 3 oben): Dazu benötigen Sie Matlab und Robotics Toolbox. Wenn Sie alle diese Einstellungen haben, stellen Sie sicher, dass Ihr Roboter mit Blynk und dem USB-Anschluss Ihres Computers verbunden ist. Matlab sammelt Informationen vom Arduino über die serielle Kommunikation. Stellen Sie also sicher, dass Sie den richtigen COM-Port in der MainScrip.m eingeben. Zum Schluss führen Sie einfach MainScrip.m aus.
Hinweis:Die Roboterkinematik ist für meinen eigenen Roboter. Für Ihren Roboter können die Abmessungen abweichen (Sie können diese in robotKinematicsFcn.m anpassen).
Code
- Quelldateien
QuelldateienC/C++
Zip-Archiv mit den Quellcodedateien.Keine Vorschau (nur Download).
Schaltpläne
Herstellungsprozess
- Makerarm:Ein megacooler Roboterarm für Maker
- Arduino-Board zielt auf industrielles IoT ab
- Roboterarm:Wie wird er hergestellt?
- Herzfrequenzmesser mit IoT
- Einsatz des IoT zur Fernsteuerung eines Roboterarms
- Arduino 3D-gedruckter Roboterarm
- Nunchuk-gesteuerter Roboterarm (mit Arduino)
- Einfacher und intelligenter Roboterarm mit Arduino
- Azure IoT Swimming Pool
- Der industrielle Roboterarm – ein Produktionsboom