


Die 5 Schritte zur Erzielung hochwertiger robotergestützter inkrementeller Umformung
Roboter-inkrementelles Umformen ist für Blechumformungen in kleinen Chargen kostengünstig. Diese Fallstudie zeigt, wie ein Team mit RoboDK Qualität erzielt hat.
Mario Guillo und sein Team sind Forscher am Institut Maupertuis in Frankreich, das auf industrielle Forschung spezialisiert ist.
Dem Team sind einige Probleme mit den traditionellen Methoden der Blechumformung aufgefallen... und sie haben beschlossen, diese Probleme zu lösen.
Warum Blechumformung in Kleinserie teuer ist
Blechumformung ist ein Spiel mit Zahlen. Wenn Sie viele identische Teile herstellen, gleichen sich Kosten und Zeit in der Regel aus. Wenn Sie jedoch nur ein oder zwei Teile herstellen, wird es schnell unwirtschaftlich.
Tiefziehen ist eine der gängigsten Methoden der Blechumformung. Es beinhaltet das Entwerfen und Herstellen einer Matrize und das anschließende langsame „Strecken“ jeder Materialbahn über die Matrize. Wenn Sie nur wenige Teile herstellen, überwiegen die Kosten für die Matrize bei weitem die Kosten für das Formen selbst.
Traditionell haben die meisten Hersteller dieses Problem einfach akzeptiert. „Nun, so ist das Leben“, sagst du. Sie drücken die Daumen und hoffen, dass der Rest unserer Bearbeitungsvorgänge diesen einen ineffizienten Prozess ausgleichen wird. Wenn die Qualität nicht wichtig ist, können Sie sich auch dafür entscheiden, das Blatt von Hand zu formen.
Mario und sein Team entschieden, dass es nicht so sein muss. Es gibt ein Verfahren zur Umformung von Qualitätsprodukten, das für kleine Chargen wirtschaftlich ist:die inkrementelle Umformung.
In dieser Fallstudie zeigen wir, wie Mario und sein Team RoboDK eingesetzt haben, um Qualitätsprodukte mit robotergestütztem inkrementellem Formen wirtschaftlich herzustellen.
Was ist robotergestütztes inkrementelles Formen?
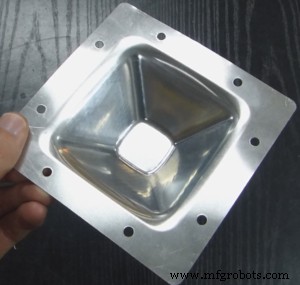
 Inkrementelles Umformen (auch als inkrementelle Blechumformung bekannt) ist eine Alternative zum Tiefziehen, bei der Blechmaterial geringfügig verformt wird. Stück für Stück, Schicht für Schicht. Auf diese Weise ist es ein bisschen wie 3D-Druck oder CNC-Bearbeitung. Anstatt in jeder Schicht Material hinzuzufügen oder zu entfernen, wird das Plattenmaterial mit jeder Schicht ganz leicht gebogen.
Inkrementelles Umformen (auch als inkrementelle Blechumformung bekannt) ist eine Alternative zum Tiefziehen, bei der Blechmaterial geringfügig verformt wird. Stück für Stück, Schicht für Schicht. Auf diese Weise ist es ein bisschen wie 3D-Druck oder CNC-Bearbeitung. Anstatt in jeder Schicht Material hinzuzufügen oder zu entfernen, wird das Plattenmaterial mit jeder Schicht ganz leicht gebogen.
Seit den 1990er Jahren wird die inkrementelle Umformung mit modifizierten CNC-Maschinen erreicht. Das CNC-Werkzeug wird durch eine Einpunktkugel ersetzt, die für jede Schicht die gewünschte Form auf das Plattenmaterial zeichnet. Zur Verringerung der Reibungswirkung wird ein Schmiermittel verwendet.
Modifizierte CNC-Maschinen sind eine gute Lösung, aber sie haben ein Problem:Sie sind teuer für größere Teile. Dies kann es für Unternehmen unmöglich machen, die inkrementelle Umformung für das Prototyping zu verwenden, was eine gängige Anwendung ist.
Robotic Incremental Forming überwindet dieses Problem, indem ein Industrieroboter verwendet wird, um das Werkzeug zu halten. Es hat Ähnlichkeiten mit der Roboterbearbeitung, die wir in einem früheren Beitrag vorgestellt haben.
Im Gegensatz zu CNC-Maschinen begrenzt der Roboter die Größe des Teils nicht. Infolgedessen ist Marios Team der Ansicht, dass das inkrementelle Umformen mit Robotern für eine Vielzahl von Anwendungen eingesetzt werden könnte, bei denen große Bleche umgeformt werden müssen, darunter Schädelimplantate, Prothesen und Automobilverkleidungen.
5 Schritte zur Erzielung hochwertiger robotergestützter inkrementeller Umformung
Robotic incremental forming ist überraschend einfach … aber nur, wenn Sie die richtigen Schritte befolgen. Das Team verwendete die folgenden fünf Schritte (wie in seiner Forschungsarbeit beschrieben), um ein Qualitätsprodukt mit robotergestütztem inkrementellem Formen zu erzielen:
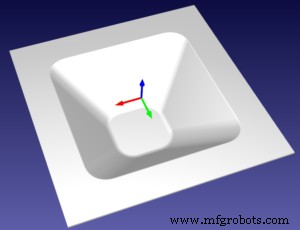
1. Erstellen Sie das 3D-Modell
Fast alle Produkte werden in CAD-Paketen (Computer Aided Design) entworfen, daher sollte dieser Schritt einfach sein. Sie müssen die Form definieren, die Sie herstellen möchten, und ein 3D-Modell davon erstellen.
2. Erstellen Sie eine Trajektorie
Sie sollten dann eine CNC-Trajektorie generieren. Dies ist in vielen CAM-Paketen (Computer Aided Manufacturing) möglich. Möglicherweise können Sie sogar das Modell und die Trajektorie in derselben Software generieren. Wenn Ihre CAD/CAM-Software diese Funktion jedoch nicht hat, kann ein billiges CAM-Programm wie CamBam, MeshCAM oder FreeMILL eine gute Option sein.
Das Team verwendete die CamBam CNC-Software, die ein kostengünstiges Tool zum Entwerfen und Erstellen von CNC-Modellen und Trajektorien ist.
Während dieses Schritts müssen Sie die Tiefe jeder Ebene und die Schichtungsstrategie festlegen. Das Team erklärte, dass es zwei gängige Strategien für einfache Teile gibt:
- Z-Layer-Strategie – Diese einfache Strategie besteht darin, jede Ebene separat zu zeichnen und am Anfang jeder Ebene einzurücken.
- Spiralstrategie – Diese etwas komplexere Strategie besteht darin, eine durchgehende Linie zu zeichnen, die spiralförmig vom oberen Rand des Formulars bis zum unteren Rand verläuft. Dies erzeugt ein glatteres Stück und übt geringere Kräfte auf den Roboter aus.
3. G-Code generieren
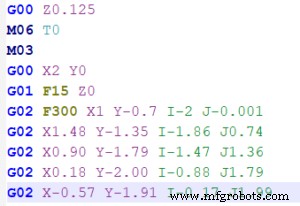
Sobald Sie Ihre Flugbahn haben, ist der nächste Schritt um es in Anweisungen umzuwandeln, die eine CNC-Maschine verstehen kann. Die gebräuchlichste Option ist G-Code, aber Sie können auch APT-CLS oder NCI verwenden.
Bei herkömmlicher CNC-basierter inkrementeller Umformung wäre dies der letzte Schritt vor der Produktion. Da wir jedoch Roboter verwenden, gibt es einen weiteren – sehr wichtigen – Schritt.
4. Wandeln Sie den G-Code in Roboterbefehle um
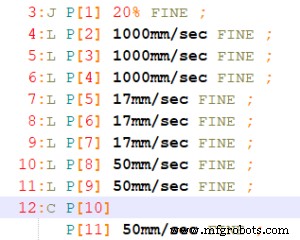
Um einen Roboter für das inkrementelle Formen zu verwenden, Sie müssen den G-Code in Befehle umwandeln, die der Roboter versteht. Allerdings hat jeder Roboterhersteller seine eigene Programmiersprache. Einige Hersteller haben spezielle CNC-Software-Add-Ons, aber diese sind oft sehr kostspielig und funktionieren nur mit Robotern ihrer Marke.
Mario und sein Team haben sich für RoboDK entschieden, da es standardmäßig ein Robot Machining Tool enthält. Es ist sehr einfach zu bedienen und kostengünstiger als andere Optionen auf dem Markt. Sie laden einfach die G-Code-Datei in die Software und sie generiert automatisch den Roboterpfad, wodurch Roboterfehler vermieden werden.
5. Übertragen Sie das Programm auf den Roboter
Der letzte Schritt besteht darin, das Programm an den Roboter zu übertragen und den inkrementellen Umformprozess zu starten. Wenn alle vorherigen Schritte gut verlaufen sind, sollte dies ziemlich einfach sein. Es gibt jedoch zwei Punkte, die Sie beachten sollten:
- Wählen Sie einen Roboter mit hoher Steifigkeit – Roboter haben eine geringere Steifigkeit als CNC-Maschinen. Dies kann bei sehr hohen Kräften, wie sie bei Zerspanungsaufgaben vorkommen können, zum Auslenken des Werkzeugs führen. Das Team verwendete einen Schwerlastroboter (mit einer Nutzlast von über 500 kg), um sicherzustellen, dass er für die Aufgabe ausreichend starr ist.
- Vermeiden Sie unnötig dickes Material – Dickes Material lässt sich aufgrund seiner geringen Steifigkeit nur schwer mit dem Roboter umformen. Wählen Sie nur die Materialstärke, die für Ihr Produkt erforderlich ist, und bereiten Sie sich darauf vor, dünneres Material zu verwenden, wenn Sie beginnen, Durchbiegungen des Werkzeugs zu sehen.
Achten Sie beim ersten Ausführen des Programms auf eventuelle Abweichungen des Werkzeugs, die durch übermäßige Krafteinwirkung auf das Roboterwerkzeug verursacht werden könnten.
Hier ist ein Video des Projekts des Teams:
Diese Arbeit wurde vom Institut Maupertius in Zusammenarbeit mit Halcyon Performance durchgeführt.
Industrieroboter
- Die 3 grundlegenden Schritte des 3D-Drucks
- Roboterschweißsysteme:Die richtige Wahl
- 3 Trends bei der robotischen Materialhandhabung in der Industrie
- Die Bedeutung der Verwaltung des Roboterschweiß-Workflows
- Die Vorteile von Durcharm-Roboterschweißpistolen
- Roboterschweißen vs. Handschweißen:Verbesserung von Qualität und Effizienz
- 5 Roboteranwendungen in der Luft- und Raumfahrtindustrie
- Sieben Schritte zur Gewährleistung der Qualität in der gesamten Lieferkette
- Aktualisierung der Qualitätsdokumente
- Robotische Bearbeitung:Die nächste Dimension