


Die 11 nützlichsten Grundlagen der Roboterprogrammierung
Welche grundlegenden Eigenschaften sind am nützlichsten, wenn Sie mit der Roboterprogrammierung beginnen?
Egal, ob Sie neu in der Welt der Robotik sind oder einfach nur Ihre Programmierkenntnisse verbessern möchten, hier sind die wichtigsten Grundlagen der Roboterprogrammierung, die Sie kennen sollten.
Es kann sich manchmal so anfühlen, als bräuchten Sie einen Abschluss in Robotik, um mit der Roboterprogrammierung zu beginnen. Die konventionellen Ansätze zur Programmierung von Industrierobotern scheinen für neue Roboterprogrammierer schwer zu verstehen.
Mit anständigen Grundlagen der Robotik und einer guten Roboterprogrammiersoftware können Sie jedoch einfach und schnell loslegen.
Hier sind die 11 nützlichsten Grundlagen der Roboterprogrammierung:
1. Grundlegende Teile eines Roboters
Bevor Sie anfangen zu lernen, wie man einen Roboter programmiert, ist es hilfreich, sich mit den grundlegenden Teilen eines Industrieroboters vertraut zu machen. Auf diese Weise sind Sie zumindest mit der physischen Maschine vertraut, die Sie programmieren werden.
Die grundlegendsten Teile eines Industrieroboters mit 6 DoF sind beispielsweise:
- Arm des Manipulators
- Endeffektor
- Verantwortlicher
- Stromquelle
- Sensoren (falls vorhanden)
Die Komponenten variieren leicht je nach Robotertyp.
2. Freiheitsgrade
Ich habe bereits ein wichtiges Konzept in der Robotik eingeführt:Freiheitsgrade (DoF).
Die DoF eines Roboters gibt an, mit wie vielen unabhängigen Achsen sich der Roboter bewegen kann. Ein 6-DoF-Manipulatorarm hat beispielsweise 6 unabhängig steuerbare Achsen. Einige DoF sind „revolute“ (d. h. sie rotieren um einen Punkt) und andere sind „linear“ (d. h. sie bewegen sich entlang einer Linie). Es ist hilfreich, sich mit der DoF eines Roboters vertraut zu machen, bevor Sie ihn programmieren.
3. Gelenke und Endeffektoren
Das „Geschäftsende“ eines Roboters (d. h. der Teil, der die Aufgabe bearbeitet) wird als „Endeffektor“ bezeichnet. Wenn Sie programmieren, sind Sie normalerweise am häufigsten daran interessiert, den Endeffektor des Roboters an bestimmte Orte zu lenken.
Um den Roboter zu bewegen, müssen Sie Anweisungen mit den gewünschten Positionen für jeden DoF des Roboters senden. Wenn Sie Software wie RoboDK verwenden, können Sie stattdessen einfach die gewünschte Position des Endeffektors direkt programmieren, anstatt bestimmte Gelenkpositionen zu senden.
4. Pose:Position und Orientierung
Wie programmieren Sie den Endeffektor, um ihm zu sagen, wohin er gehen soll?
Die Position und Ausrichtung des Endeffektors des Roboters (oder jeder anderen von Ihnen programmierten Position) werden kombiniert, um die „Pose“ zu bilden. Sie müssen die Pose jedes Ortes angeben, zu dem sich der Roboter in Ihrem Programm bewegt. Die gebräuchlichste Methode, eine Pose beim Programmieren anzugeben, ist durch Euler-Winkel.
Weitere Informationen finden Sie in unserem Artikel Robot Euler Angles:The Essential Primer.
5. Tool Center Point (TCP)
Da wir bei der Programmierung eines Roboters am meisten an der Pose des Endeffektors interessiert sind, verwenden wir häufig den Begriff Tool Center Point, um auf das Betriebszentrum des Werkzeugs zu verweisen.
Hier sind einige Beispiele für verschiedene Endeffektoren:
- Klebepistole – Sie können den TCP so einstellen, dass er sich an der Spitze der Waffe befindet.
- Greifer — Der TCP könnte sich in der Mitte der Finger des Greifers befinden.
- Schweißpistole — Der TCP kann einige Millimeter von der Spitze der Pistole entfernt sein, wo die Flamme am heißesten ist.
Als Programmierer entscheiden Sie, wo es am sinnvollsten ist, den TCP des Roboters zu platzieren.
6. Kinematik
Einer der herausfordernderen Aspekte der Robotik ist die Kinematik. Damit ist lediglich die geometrische Anordnung des Roboters gemeint. Kinematik wird als ziemlich große Gleichung oder Algorithmus dargestellt.
Die Forward-Kinematic-Gleichung beantwortet die Frage "Wenn ich die Gelenke des Roboters auf eine bestimmte Position einstelle, wo landet der TCP?"
Der inverse kinematische Algorithmus beantwortet die entgegengesetzte Frage „Wenn ich möchte, dass der TCP in dieser Pose endet, auf welche Position muss ich die Gelenke einstellen?“
Mit einer guten Roboterprogrammiersoftware müssen Sie wahrscheinlich keine eigene Kinematik formulieren, aber es kann hilfreich sein, das Grundkonzept zu verstehen.
7. Gemeinsame Grenzen
Die kinematischen Gleichungen beschreiben den Roboter mit reiner Geometrie und Mathematik. Roboter sind jedoch physische Maschinen. Der physische Roboter kann oft nicht jede Position erreichen, die die Geometrie vorschreibt.
Wir führen Gelenkbegrenzungen in die Programmierung ein, um die Bewegung der Robotergelenke nur auf Positionen zu beschränken, die physikalisch möglich sind. Sie sagen dem Programm einfach "Dieses Gelenk kann sich nicht über diesen bestimmten Winkel hinaus bewegen."
8. Bewegungsarten
Wenn Sie den Roboter programmieren, gibt es verschiedene Arten von Bewegungen, die der Roboter ausführen kann.
Die 3 Grundbewegungen sind:
- Gemeinsamer Umzug — Dies ist eine schnelle, grobe Bewegung, bei der jedes Gelenk versucht, so schnell wie möglich in seine Zielposition zu gelangen. Um Kollisionen zu vermeiden, sollten Gelenkbewegungen nur programmiert werden, wenn sich der Roboter im freien Raum bewegt.
- Lineare Bewegung — Dies ist eine kontrollierte Bewegung entlang einer Linie zwischen zwei Posen. Der Roboter wird sich bei einer linearen Bewegung zwangsläufig langsamer bewegen, aber auch keine unnützen Kollisionen verursachen.
- Kreisbewegung – Wie bei einer linearen Bewegung bewegt sich der Roboter in einer kontrollierten Linie, diesmal entlang einer Kreisbahn.
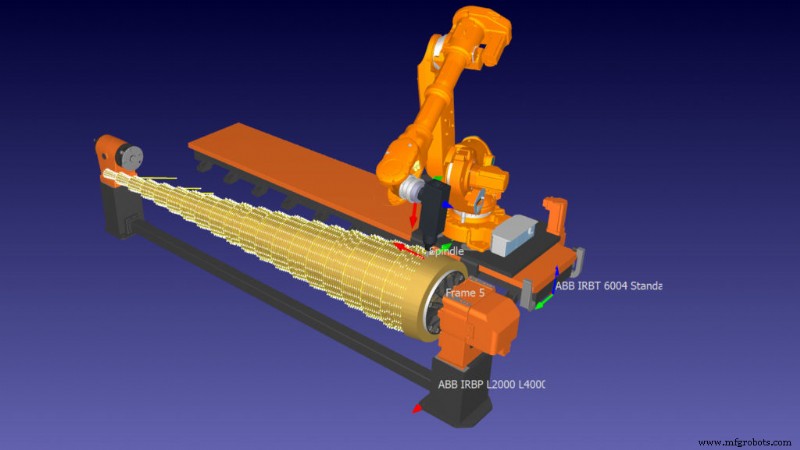
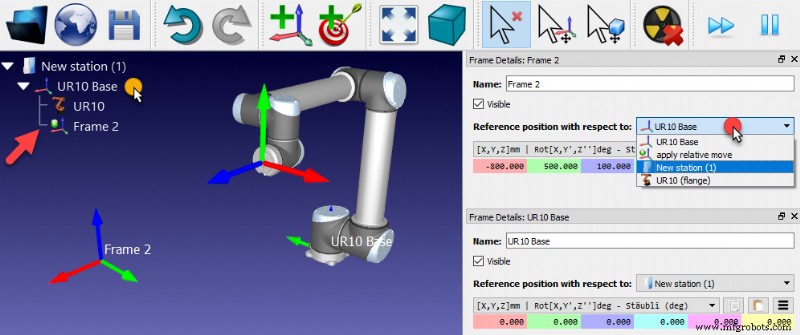
9. Simulation und Offline-Programmierung
Es gibt viele verschiedene Möglichkeiten, einen Roboter zu programmieren, einschließlich „sich die Hände schmutzig zu machen“ mit der (normalerweise komplexen) Programmiersprache, die vom Roboterhersteller bereitgestellt wird.
Simulation und Offline-Programmierung bieten eine einfachere Programmiermethode. Anstatt den physischen Roboter direkt zu programmieren, programmieren Sie ein simuliertes Modell des Roboters mit intuitiven Befehlen. Die Software wandelt dann das Programm in Code um, den der physische Roboter verstehen kann.
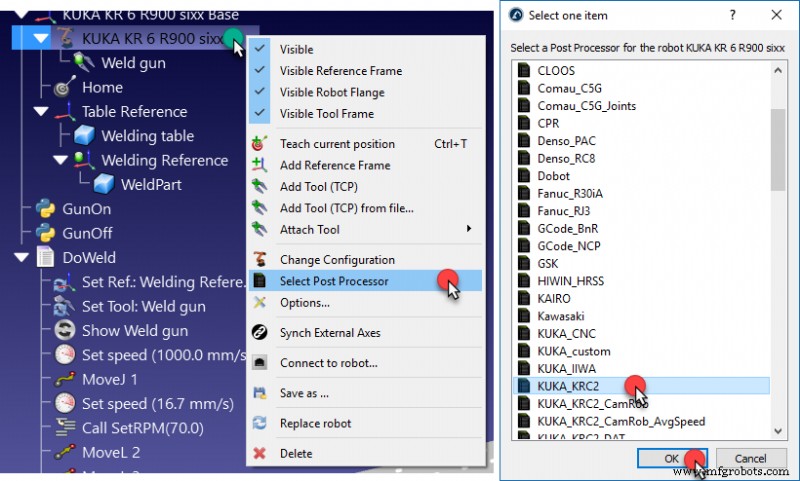
10. Postprozessoren
Der Teil einer Offline-Programmiersoftware, der das Roboterprogramm umwandelt, wird als Postprozessor bezeichnet. Die Programmiersoftware hat für jeden Roboterhersteller einen anderen Postprozessor, manchmal mehr als einen.
Weitere Informationen zu Postprozessoren finden Sie in unserem Artikel Roboter-Postprozessoren:Alles, was Sie wissen müssen.
11. Fehlerbehebung
Unabhängig davon, welche Programmiermethode Sie verwenden, ist das Debuggen eine wichtige Grundfertigkeit. Sie sollten Ihr Programm immer debuggen, um sicherzustellen, dass es wie beabsichtigt funktioniert, bevor Sie Ihren Roboter in einer Produktionsumgebung zum Laufen bringen.
Die Offline-Programmierung bietet Ihnen einen zusätzlichen Debugging-Schritt, da Sie ein simuliertes Modell des Roboters programmieren, bevor Sie das Programm auf den physischen Roboter selbst herunterladen, wodurch die Möglichkeit von Fehlern verringert wird.
Wenn Sie sofort mit der Roboterprogrammierung beginnen möchten, können Sie hier eine kostenlose Testversion von RoboDK herunterladen.
Bei welchen grundlegenden Aspekten der Roboterprogrammierung möchten Sie Hilfe? Erzählen Sie es uns in den Kommentaren unten oder beteiligen Sie sich an der Diskussion auf LinkedIn, Twitter, Facebook, Instagram oder im RoboDK-Forum.
Industrieroboter
- Die Vorteile von Fernüberwachung, Fernprogrammierung und vorausschauender Wartung
- Knickgelenkte Roboter:Leitfaden für den bekanntesten Industrieroboter
- Kartesische Roboter:Leitfaden für die skalierbarste Robotertechnologie
- SCARA-Roboter:Leitfaden für den vielseitigsten und gefragtesten Roboter
- Kommentar:Die Methoden der Roboterprogrammierung verstehen
- Was ist TPU-Filament? Die Grundlagen &Nützliche Anleitung.
- Wann ist der richtige Zeitpunkt, um in Roboterprogrammiertools zu investieren?
- Industrieroboterprogrammierung für Anfänger
- Auswahl der richtigen Roboter-Kommissionierungssoftware
- Fanuc-Beschichtungsroboter:der P-250iA