


Can Bus Shield:Alles über diesen Automotive Controller verstehen
Damals war die Automobiltechnik noch nicht so weit fortgeschritten wie heute. Es kamen verschiedene Innovationen, darunter das Can-Bus-Shield. Damit werden moderne Fahrzeuge jetzt intelligenter. Informationen wie die tatsächliche Motordrehzahl und die Fahrzeuggeschwindigkeit sind jetzt über den elektrischen Stromkreis des Fahrzeugs verfügbar.
Daher ist seine Popularität aufgrund seiner Zuverlässigkeit und mittleren Kommunikationsgeschwindigkeit keine Überraschung. Anschließend diskutieren wir die Can-Bus-Fähigkeiten und wie man sie mit Mikrocontrollern verwendet.
1. Was ist der Can-Bus?
Das Can-Bus-Shield ist eine industrielle Steuerung, die in modernen Werkzeugmaschinen zu finden ist. Ein gutes Beispiel ist die Onboard-Diagnose, die eine gültige Nachricht von Minimotoren oder einem TIPM verwendet, um elektronische Funktionen zu betreiben.
(Ein Can-Bus Shield V2-Chip).
https://commons.wikimedia.org/wiki/File:CAN_BUS_Shield_V2.jpg
2. Funktionen
Das Can-Bus-Schild hat mehrere Merkmale, die es einzigartig und effektiv machen. Dazu gehören:
- Der CS-Pin ist mit der Datenspeicherung auf TF-Karten kompatibel und verfügt über einen SD-Kartensteckplatz zum Speichern von Nachrichten.
- Normalerweise hat die Standard-Pinbelegung einen austauschbaren Chip-Select-Pin.
- Es verwendet CAN Version 2 Remote Frames mit einer Datengeschwindigkeit von 1 MB pro Sekunde.
- Außerdem verwendet die Standard-Pinbelegung einen Industriestandard-Sub-D-Stecker mit neun Pins.
- Außerdem ermöglicht es eine wählbare Funktion für CAN- und OBD-II-Pinbelegung.
- Außerdem hat es einen austauschbaren INT-Pin.
- Ein weiteres großartiges Feature ist die Unterstützung für einen Standard-Frame, zwei Empfangsmethoden und die Kompatibilität mit der Arduino-Standardschnittstelle.
- Trotzdem hat es große Can-Bus-Modulanschlüsse für UART und I2C.
3. Hardware und Software
A. Hardware
- DB9-Leistungsschnittstelle.
- V_OBD.
- LED-Anzeigen:
- PWR:
- TX.
- Empfang. V_OBD.
- INT
- Klemmen – Für CAN_L und CAN_H.
- Arduino UNO-Pinbelegung.
- Serielle Grove-Anschlüsse.
- I2C-Grove-Anschlüsse.
- ICSP-Pins.
- MCP2551 Can-Bus-Controller – CAN-Transceiver mit hoher Geschwindigkeit.
- MCP2515 Can-Bus-Controller – Einzelner CAN-Controller mit integrierter SPI-Schnittstelle.
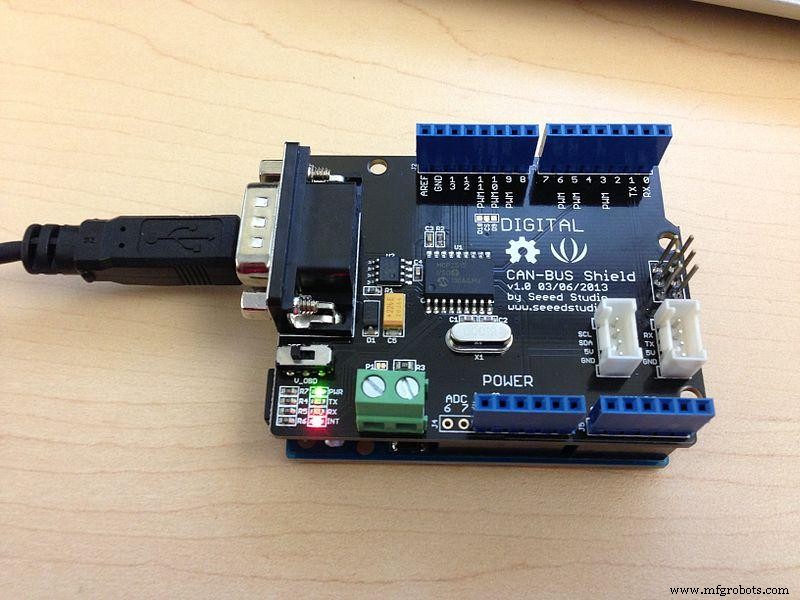
(Ein Can-Bus-Schild mit Arduino Uno).
https://commons.wikimedia.org/wiki/File:Arduino_Uno_with_CAN-bus_shield.JPG
B. Software
Im Allgemeinen ist die Software mit Arduino-Standardschnittstellen wie Arduino Uno, Arduino Leonardo oder Arduino MEGA kompatibel.
4. Funktionsweise von Can-Bus Shield?
https://www.youtube.com/watch?v=PEI5EWSgaRk
(Dieses Video führt Sie durch die Funktionsweise eines Can-Bus-Shields).
5. Can Bus Shield Einstiegsbetrieb
Um mit dem Betrieb des Can-Bus-Shields zu beginnen, müssen Sie die folgenden Schritte ausführen.
Benötigte Materialien
- 2 CAN-Bus-Shields für die CAN-Bus-SPI-Kommunikation.
- 2 Seeeduino V4.2 Mikrocontroller.
- Überbrückungsdrähte für den Anschluss von Can-Bus-Abschirmungen und Seeeduino-Controllern.
Hardwareverbindung
Zunächst müssen Sie die beiden Can-Bus-Abschirmungen in der Seeeduino-Version 4.2 platzieren. Anschließend verbinden Sie diese beiden CAN-Bus-Schirme mit Drahtbrücken. Verbinden Sie sie wie folgt:
CAN_L zu CAN_L und CAN_H zu CAN_H.
Softwareinstallation
Für die Softwareinstallation müssen Sie die Arduino-Bibliothek für den Can-Bus konsultieren. Stellen Sie danach einen Knoten als Master ein, während der andere als Slaver fungiert.
Code
Laden Sie den entsprechenden Code in die Arduino IDE hoch, um die Programmierung Ihres Can-Bus-Shields abzuschließen.
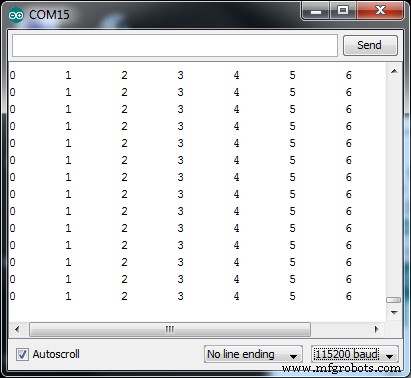
(Ein serieller Monitor, der gesendete und empfangene Daten zwischen zwei Can-Bus-Abschirmungen anzeigt).
6. Häufig gestellte Fragen
Ist Can-Bus-Shields mit Arduino kompatibel?
Ja. Der Controller ist vollständig kompatibel mit Arduino Uno, Arduino MEGA und Arduino Leonardo.
So ändern Sie den SS-Pin?
Befolgen Sie die folgenden Schritte:
- Verwenden Sie zuerst ein Messer, um das Kupferkabel zwischen digital ten und CS zu durchtrennen.
- Als nächstes löten Sie den Kupferdraht, um ihn mit D9 zu verbinden.
- Gehen Sie danach zur Bibliothek und ändern Sie den SS-Pin entsprechend.
CAN-BUS-Shields-Initialisierung schlägt fehl
Für Can-Bus-Shield V1.1 bis Can-Bus-Shield V2 und höher müssen Sie den Code wie folgt ändern:
MCP_CAN CAN(9); // CS auf Pin 9 setzen.
Schlussfolgerung
Zusammenfassend lässt sich sagen, dass die CAN-Bus-Abschirmungen hervorragend für Automobilanwendungen geeignet sind. Mit Hilfe eines Arduino-Mikrocontrollers läuft es jedoch auf Codes, um mehrere Elemente auf dem Armaturenbrett Ihres Autos zu steuern.
Das Konstruieren und Programmieren großartiger Projekte mit dem Can-Bus-Shields-Modul wurde also einfacher. Wenden Sie sich daher an uns, wenn Sie bei solchen Bauvorhaben professionelle Unterstützung benötigen. Willkommen bei uns.
Industrietechnik
- Arduino Spybot
- Arduino GrowBox Controller
- In der Smart Factory von Industrie 4.0 dreht sich alles um diese Daten
- Alles über Oxy-Fuel
- Surface Mount Technology – Worum geht es?
- Alles über Feinguss für Luft- und Raumfahrtanwendungen
- Verstehen, worum es beim Senkerodieren geht
- Verstehen, worum es bei der Hartbearbeitung geht
- Einen Automotor verstehen
- Ein Kfz-Relais verstehen