


So entscheiden Sie, welcher Roboter mit Workspace Visualization am besten geeignet ist
Wie können Sie vor dem Kauf feststellen, ob ein Roboter den Platzanforderungen Ihrer Aufgabe entspricht?
Auch wenn Sie Ihre Auswahl anhand all der üblichen Spezifikationen und Metriken eingegrenzt haben, haben Sie vielleicht noch einige nagende Zweifel.
Wird der Roboter so groß sein, dass er nicht in den Platz passt, den Sie dafür zur Verfügung haben?
Wenn Sie sich für einen kleineren Roboter entscheiden, kann er alle Bereiche erreichen, die Sie für die Aufgabe benötigen?
Gibt es eine Möglichkeit, die Größe des Roboters so zu optimieren, dass er am effizientesten ist?
Bevor Sie einen bestimmten Roboter kaufen, ist es schwer zu sagen, wie es sein wird, ihn in Ihrer Einrichtung neben sich zu haben. Sie können sich alle YouTube-Videos ansehen, die Ihnen gefallen, alle Datenblätter lesen und sich sogar andere Roboter in den Einrichtungen anderer Leute ansehen …
Ohne zu sehen, wie der Roboter in Ihre spezifische Aufgabe passt, kann es manchmal zu einem Ratespiel werden. Du machst so viele Berechnungen wie du kannst, dann hoffst du einfach.
Oder Sie entscheiden sich dafür, zu konservativ zu sein und riesige Mengen an Bodenfläche an einen Roboter zu verschenken, der ihn nicht benötigt.
Vielleicht sind Sie bereits unseren Leitfaden zur Auswahl eines Roboters für die Fertigung durchgegangen.
Sie haben ermittelt, welchen Robotertyp Sie benötigen, welchen Endeffektor und welches Zubehör. Sie haben Ihre Optionen auf eine Auswahl von Robotern basierend auf ihrer Nutzlast und Wiederholbarkeit eingegrenzt. Und Sie haben unsere Tools verwendet, um eine Reichweite auszuwählen, die mehr oder weniger angemessen erscheint.
Aber Sie können sich immer noch nicht den gesamten Platz vorstellen, den jeder Roboter einnehmen wird.
Warum es schwer vorstellbar ist, wie viel Platz ein Roboter einnehmen wird
Das Problem mit Robotern ist, dass sie so dynamisch sind.
Mit einer CNC-Maschine können Sie beispielsweise auf einer Messe zu einer Maschine gehen und genau sehen, wie viel Platz sie auf Ihrer Arbeitsfläche einnehmen wird. Die volle Größe der Maschine ist einfach zu berechnen – es ist im Grunde ein großer Quader.
Bei einem Roboter ist der Platzbedarf nicht so einfach. Neben den physikalischen Abmessungen des Roboters selbst nimmt er auch einen erweiterten Raum ein, der alle Stellen enthält, die der Endeffektor des Roboters erreicht, wenn sich der Roboter bewegt. Dies wird als „Arbeitsbereich“ des Roboters bezeichnet.
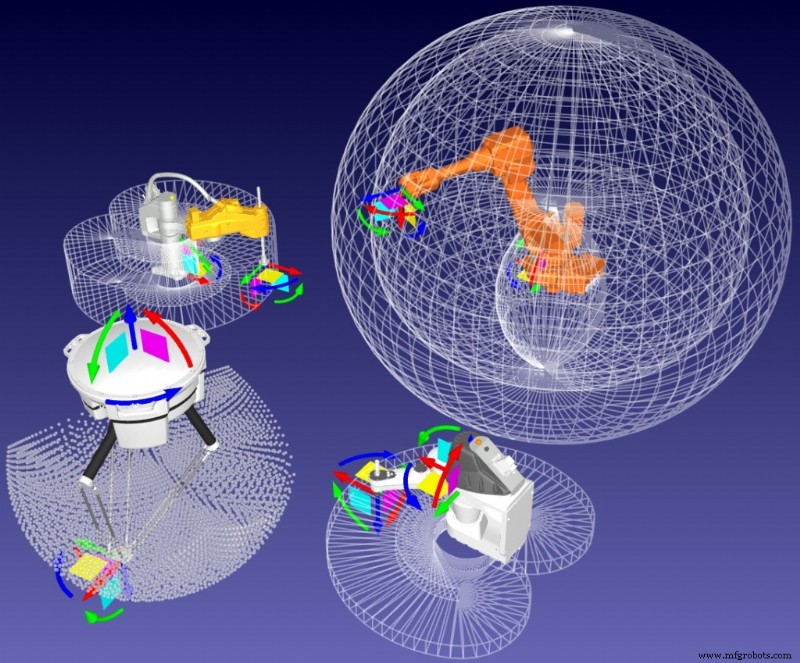
Die meisten 6-DoF-Industrieroboter haben einen Arbeitsraum, der einer Kugel ähnelt. Delta-Roboter haben einen komplexen Arbeitsbereich, der wie ein dreidimensionaler Bogen aussieht. SCARA-Roboter haben einen zylindrischen Arbeitsbereich.
Es ist schwer zu sagen, wie sein Arbeitsbereich aussehen wird, wenn man sich einen Roboter ansieht.

Wie können Sie sicherstellen, dass der Roboter, den Sie in Betracht ziehen, über einen Arbeitsbereich verfügt, der Ihren Anforderungen entspricht?
Arbeitsbereichsvisualisierung hilft Ihnen, eine bessere Entscheidung zu treffen
Glücklicherweise gibt es eine Möglichkeit, den Arbeitsbereich des Roboters zu sehen und herauszufinden, wie er sich auf Ihre spezielle Aufgabe auswirkt.
Und Sie können dies tun, bevor Sie sich überhaupt entscheiden, welchen Roboter Sie kaufen möchten.
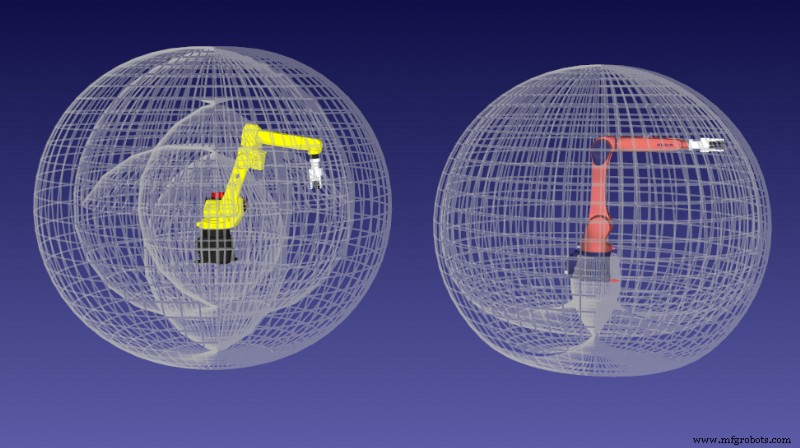
Die Arbeitsbereichsvisualisierung ist ein Tool, mit dem Sie die äußeren Grenzen des Arbeitsbereichs eines Roboters als 3D-Form visualisieren können. In RoboDK wird dieser Raum als grauer Umriss dargestellt, der um das simulierte Modell des Roboters gelegt wird.
Sie können diese Funktion verwenden, um Ihre Entscheidung darüber zu treffen, welcher Roboter für Ihre Aufgabe am besten geeignet ist.
Indem Sie ein virtuelles Mock-up Ihrer Anwendung erstellen, können Sie schnell zwischen verschiedenen Robotermodellen wechseln (ohne die Aufgabe selbst programmieren zu müssen) und die Arbeitsbereichsvisualisierungsfunktion verwenden, um zu sehen, ob jeder spezifische Roboter für Ihre Anforderungen am besten geeignet ist.
Sobald Sie einen Roboter gefunden haben, der für die Aufgabe geeignet ist – basierend auf seinem Arbeitsbereich – können Sie die Anwendung in den Simulator programmieren, um sicherzustellen, dass Ihr ausgewählter Roboter die Aufgabe wirklich erledigen kann.
Wie die Arbeitsbereichsvisualisierung funktioniert
Wenn Sie sich das Datenblatt eines Roboters ansehen, sehen Sie normalerweise eine grundlegende bildliche Darstellung des Arbeitsbereichs dieses Roboters. Normalerweise besteht diese aus einer Ansicht von der Seite und einer von oben auf den Roboter.
Solche Bilder sind hilfreich, aber nicht hilfreich genug.
Eine Arbeitsbereichsvisualisierung ist im Grunde eine 3D-Version solcher Bilder. Es wird erzeugt, indem alle Gelenke des Roboters algorithmisch durch alle möglichen Positionen bewegt werden und die resultierende Position des Endeffektors in eine 3D-Form abgebildet wird.
Da die Berechnung in 3D erfolgt, erhalten Sie eine viel ganzheitlichere Perspektive auf die Fähigkeiten eines bestimmten Roboters, als wenn Sie sich nur das Datenblatt des Roboters ansehen würden.
Die Auswirkungen des Hinzufügens eines Endeffektors
Änderungen, die Sie am Roboter vornehmen, wirken sich manchmal auch auf seinen Arbeitsbereich aus. Wenn Sie beispielsweise einen Endeffektor hinzufügen, ändern die Abmessungen dieses Endeffektors die Größe und manchmal auch die Form des Arbeitsbereichs. In RoboDK können Sie den Arbeitsbereich des Roboters mit und ohne Endeffektor anzeigen.
Wenn Sie Ihrem Roboter einen Endeffektor hinzufügen, empfiehlt es sich, die Arbeitsbereichsvisualisierungsfunktion zu verwenden, um zu sehen, wie sie sich auf den Arbeitsbereich des Roboters auswirkt.
Erste Schritte mit der Arbeitsbereichsvisualisierung
Mit RoboDK ist es sehr einfach, die Arbeitsplatzvisualisierung zu verwenden, um Sie bei Ihren Kaufentscheidungen für Roboter zu unterstützen.
Hier sind die Schritte, um den Arbeitsbereich eines bestimmten Roboters anzuzeigen:
- Laden Sie das Robotermodell aus unserer umfangreichen Roboterbibliothek in RoboDK.
- Öffnen Sie das Eigenschaftenfenster des Roboters, indem Sie im Programmbaum mit der rechten Maustaste darauf klicken.
- Gehen Sie zum Abschnitt mit der Bezeichnung WorkSpace und wählen Sie, ob Sie entweder den Arbeitsbereich des Roboters selbst (von seinem Flansch) oder mit dem aktuell angebrachten Werkzeug anzeigen möchten.
- Sie sehen nun den Arbeitsbereich des Roboters um den Roboter herum visualisiert.
Natürlich sind Sie nicht darauf beschränkt, jeweils nur den Arbeitsbereich eines Roboters zu sehen. Sie können mehrere Roboter in die Simulation laden und ihre Arbeitsbereiche nebeneinander vergleichen.
Dies kann nützlich sein, wenn Sie versuchen, sich zwischen zwei verschiedenen Robotermodellen zu entscheiden. Es kann aber auch hilfreich sein, wenn Sie mehrere Roboter für eine einzelne Aufgabe verwenden und herausfinden möchten, wie ihre Arbeitsbereiche möglicherweise interagieren und sich überschneiden.
Wie könnte die Arbeitsplatzvisualisierung Ihren Robotereinsatz unterstützen? Teilen Sie uns dies in den Kommentaren unten mit oder beteiligen Sie sich an der Diskussion auf LinkedIn, Twitter, Facebook, Instagram oder im RoboDK-Forum.
Industrieroboter
- Welche industriellen Lackierroboter funktionieren am besten?
- Die 10 besten Hersteller von SCARA-Robotern
- So entscheiden Sie, welches Ingenieurbüro das Richtige für Sie ist
- Kostenloses Robotertraining mit RoboDK
- Roboterbohren 101:Wie man ein Roboterbohrsystem einsetzt
- Wie Hollywood mit Roboterfräsen atemberaubende Requisiten herstellt
- 10 Tricks, um mit Roboterschweißen die besten Ergebnisse zu erzielen
- Wie man das Management davon überzeugt, der Roboterbearbeitung zuzustimmen
- Erste Schritte mit der Yaskawa-Roboterprogrammierung
- Roboterkalibrierung:Welche Teile müssen kalibriert werden?