


Roboterarm-Projekt:Eine Schritt-für-Schritt-Anleitung
Kämpfen Sie mit Aufgaben, die ein hohes Maß an Genauigkeit erfordern? Oder haben Sie es mit konsistenten und sich wiederholenden Vorgängen zu tun, die hohe Präzision und Leistung erfordern? Dann brauchen Sie ein Roboterarmprojekt.
Außerdem ist es ein zuverlässiges elektronisches PCB-Gerät, das eine Vielzahl von Operationen ausführen kann. Sie finden den Roboterarm also in verschiedenen Branchen wie:
- Maschinenzugriff
- Labors
- Industrielle Automatisierung
- Herstellung
Daher wird es eine brillante Idee sein, das Roboterarmprojekt aufzugreifen. Zweifellos sieht es zunächst kompliziert aus, aber wenn alle Materialien vorhanden sind, wird die Aufgabe einfacher. In diesem Artikel geben wir Ihnen Details zum Bau eines Roboterarms.
Lass uns zur Arbeit gehen!
Was ist ein Roboterarm?

Industrieller Roboterarm
Ein Roboterarm bezieht sich auf ein mechanisches Werkzeug, das Sie durch spezielle Software automatisieren können. Und Sie können die spezielle Software auf einem bestimmten Mikrocontroller installieren. Meistens kann dieses Gerät entweder Teil eines menschenähnlichen Roboters oder ein unabhängiges Gerät sein.
Außerdem hängt die Art der Aufgabe, die es ausführt, von der Bewegung des Armgelenks ab. Beispielsweise können Sie einen Roboterarm und einen Robotergreifarm mit separaten Gelenken sehen, die sich in einer geraden Richtung bewegen können.
Wie baut man einen einfachen Roboterarm?
Wir zeigen Ihnen, wie Sie einen einfachen Roboterarm bauen, der sich an die Abfolge der Bewegungen und des Spiels erinnert. Lassen Sie uns einen Blick auf die Komponenten werfen, die Sie für das Projekt benötigen:
- Brotbrett
Ein Steckbrett
- Holzstücke
- Arduino IDE installiert
- Servomotoren (5)
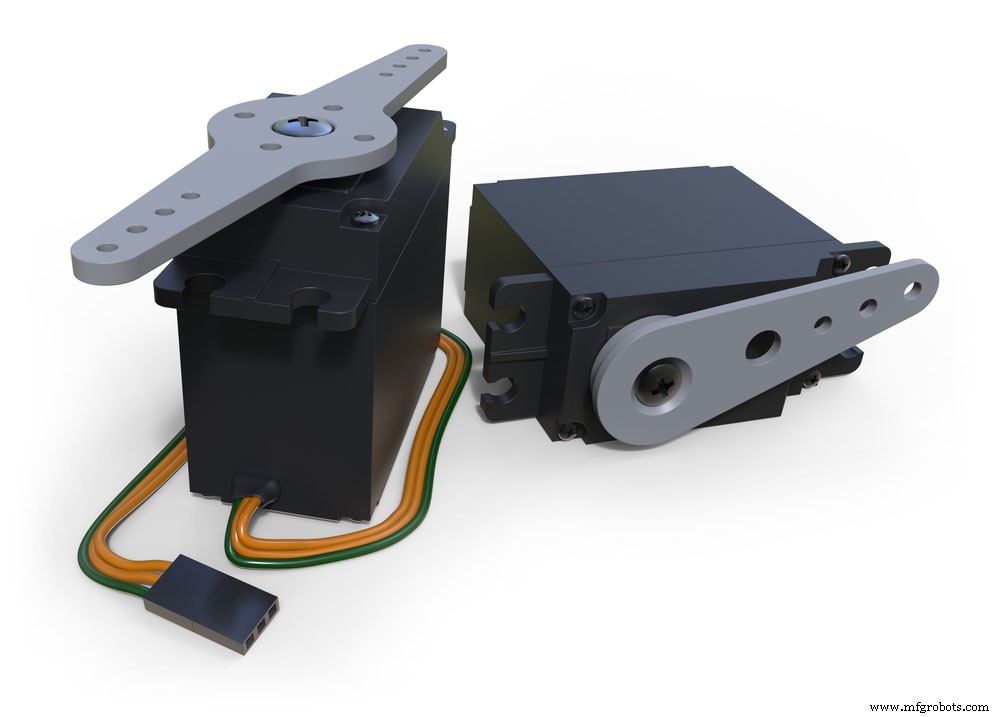
Satz Servomotoren
- Arduino UNO
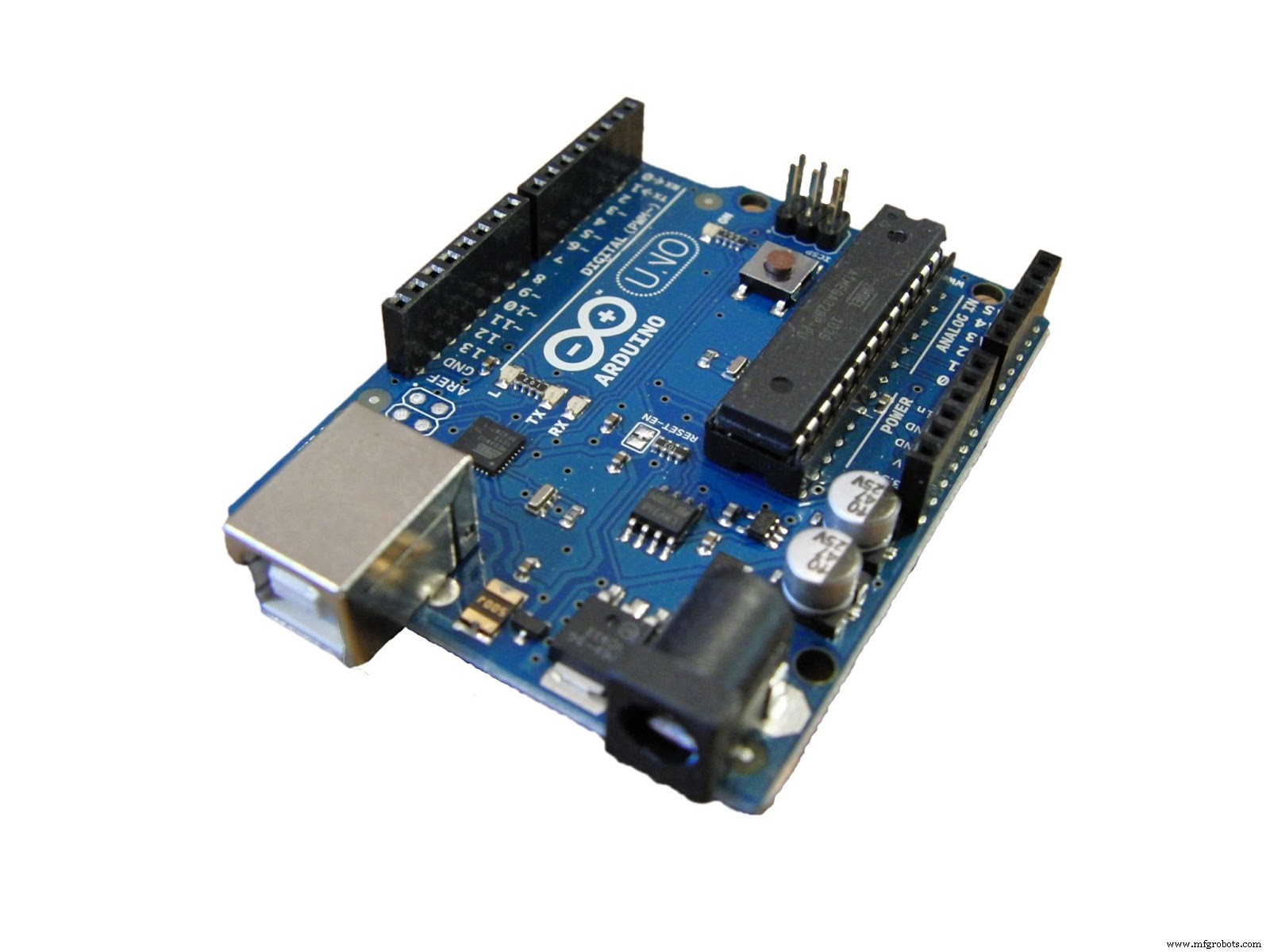
Arduino UNO
Quelle:Wikimedia Commons
- Potentiometer (5)
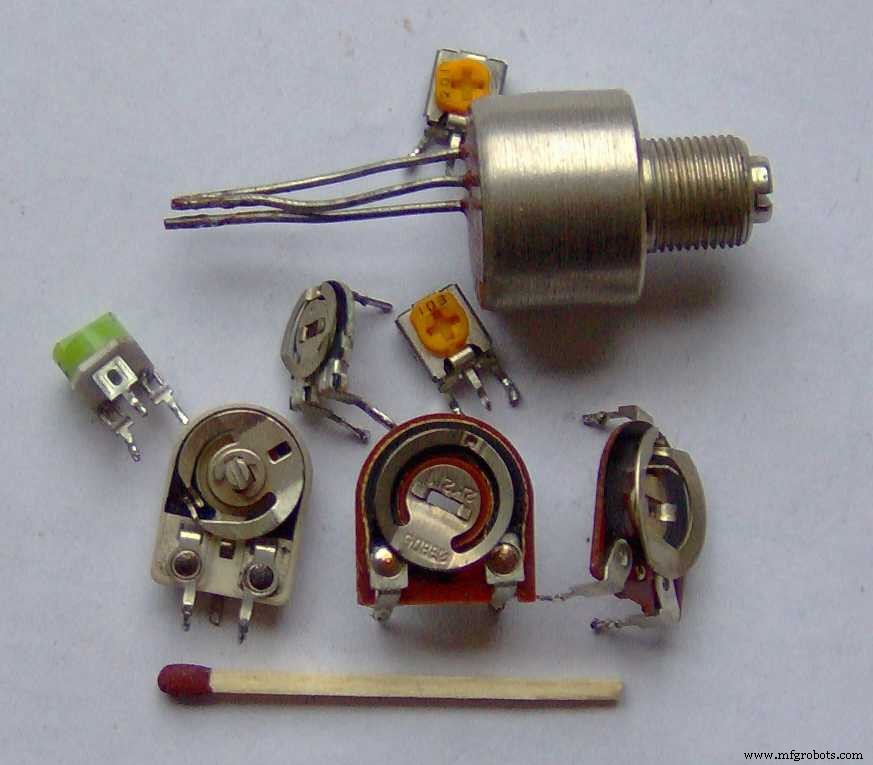
Potentiometersatz
Quelle:Wikimedia Commons
- Adapter (5V 2A)
- Leinwand (A4-Format)
- Signaldrähte

Signaldrähte
Vor diesem Hintergrund können Sie Ihr einfaches Roboterarmprojekt in den folgenden Schritten erstellen:
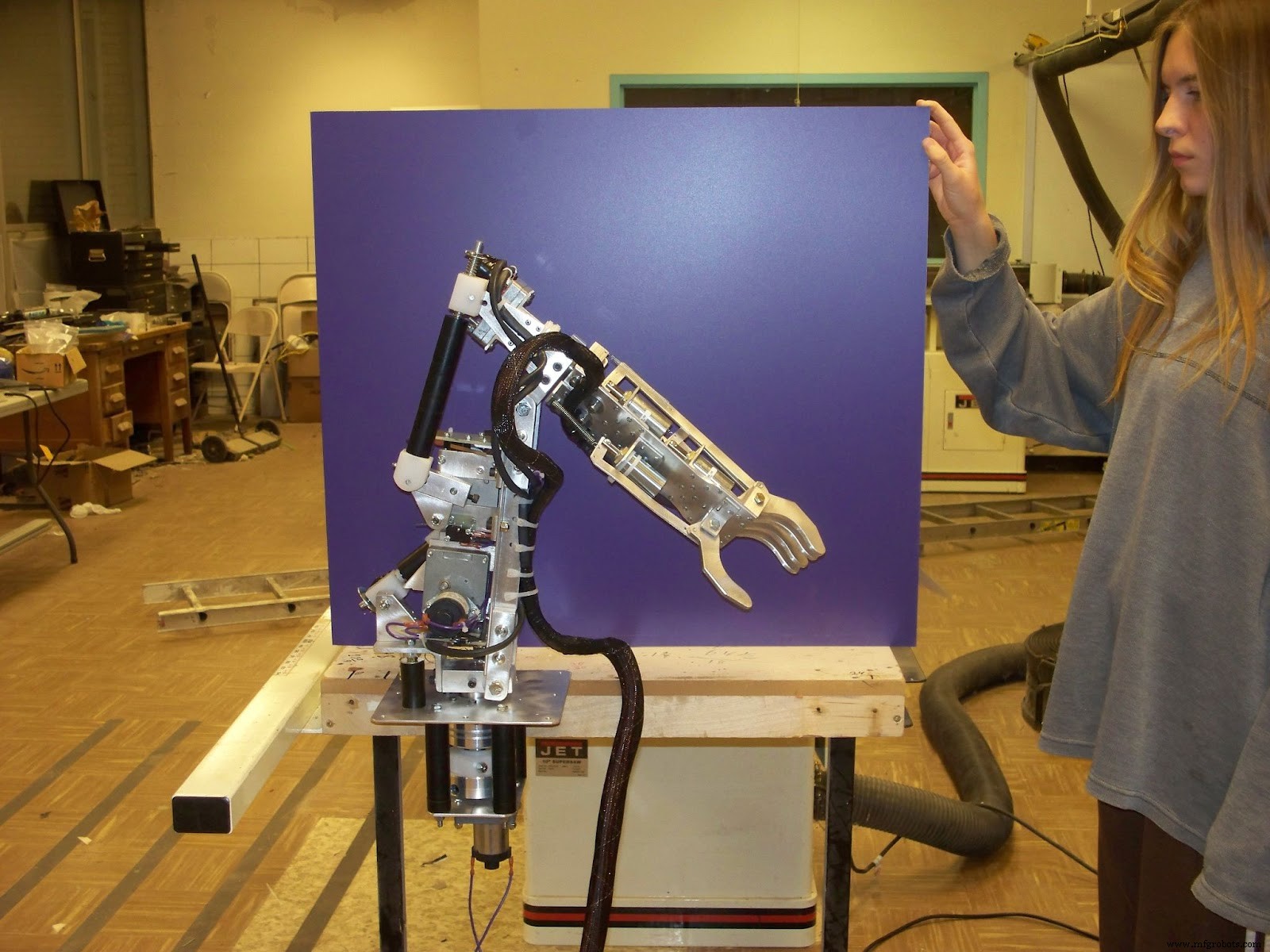
Roboterarm bei der Arbeit
Schritt 1 – Fangen Sie an, die Teile zusammenzusetzen
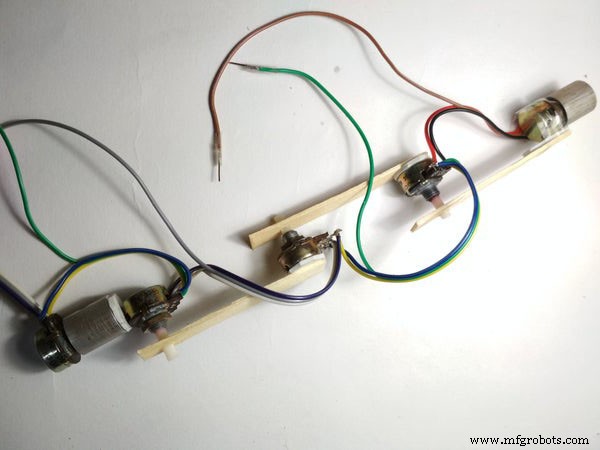
Eis am Stiel Holzstücke verbunden mit Potentiometer
Quelle:Instructable
Der erste Schritt besteht darin, ein kleines und stabiles Stück Holz zu besorgen, um den Arm herzustellen. Wenn Sie schon dabei sind, entscheiden Sie sich für ein beliebiges mechanisches Design, das Sie bevorzugen. Dann kleben Sie die Servos mit einem Klebeband (doppelseitig) auf Ihr Holz. Danach die Servos mit Schrauben am Holz befestigen.
Was den Hauptarm betrifft, können Sie ihn herstellen, indem Sie Ihre Potentiometer auf dem kleinen Holzstück befestigen. Sie können Ihr Leinwandbrett als Basis verwenden, um Ihr Setup zu montieren.
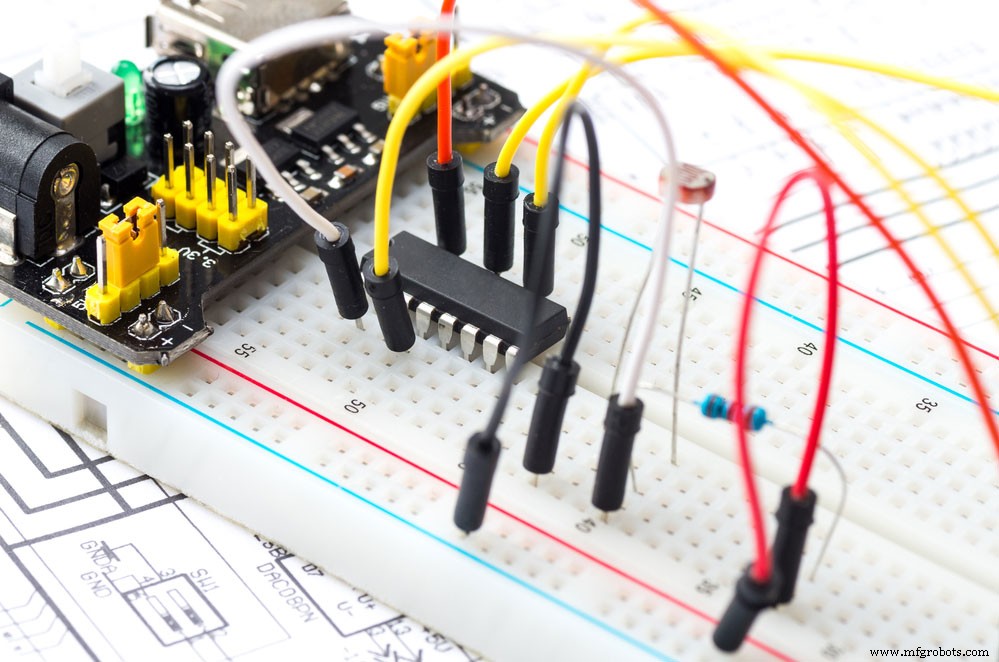
Schritt 2 – Verbinden Sie Ihre Kabel
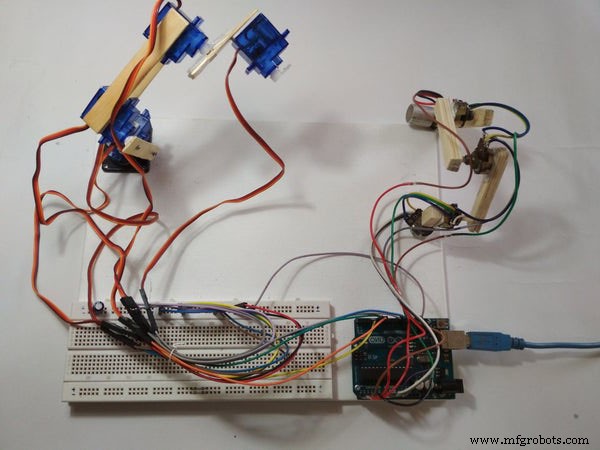
Anschließen der Drähte und Holzstücke auf dem Steckbrett
Quelle:Instructable
Das Ziel hier ist sicherzustellen, dass Sie alle Ihre Drähte richtig anschließen. Und der erste Schritt ist, alle Ihre Servos zu bekommen. Führen Sie dann eine parallele Verbindung der Servos zur Stromquelle durch. Das heißt, Ihr schwarzer Draht sollte an Gnd gehen, während der rote Draht an den Pluspol angeschlossen ist.
Sobald Sie das haben, nehmen Sie Ihre Signaldrähte (orange oder gelb) und schließen Sie sie an den PWM-Pin des Arduino an. Damit können Sie fortfahren, den Gnd von Arduino parallel zu verbinden. Außerdem müssen Sie Ihre Potentiometer an +5 V anschließen.
Befestigen Sie anschließend Ihr mittleres Terminal am Arduino Analog-Pin. Allerdings können Sie die Servos mit digitalen Pins wie 10, 9, 6, 5 und 3 regulieren. Außerdem können Sie die A0 bis A4 (analoge Pins) für die Eingabe von Potentiometern verwenden.
Außerdem hilft das Potentiometer, das mit A0 verbunden ist, bei der Regulierung des Servos, das an Pin 3 angeschlossen ist. Außerdem steuert das Potentiometer an A1 das Servo, das an Pin 5 angeschlossen ist.
Zweifellos versorgt der Arduino die Servos nicht mit Strom. Aber es ist wichtig sicherzustellen, dass Sie Arduino und GND richtig verbinden – damit der Arm funktioniert.
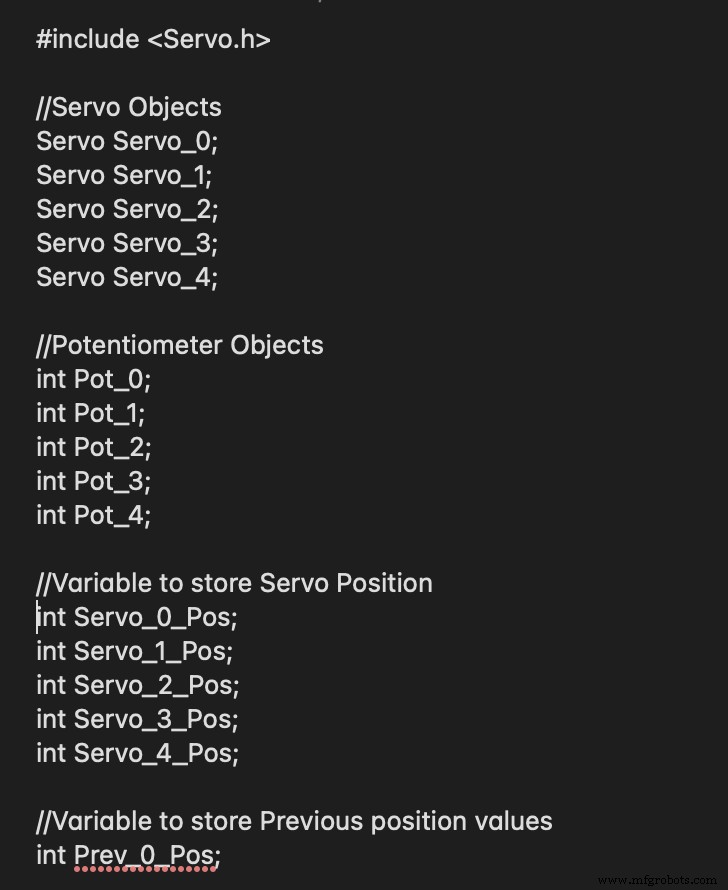
Schritt 3 – Zeit zum Programmieren
Der Codierungsprozess für dieses Projekt ist ziemlich einfach. Sie können also damit beginnen, die Potentiometer in einem Array zu speichern. Wenn Sie die Datensätze erhalten, fahren Sie fort, sie mit einer for-Schleife zu durchqueren. Auf diese Weise übernehmen die Servos die Schritte.
Mit anderen Worten, Sie können den Prozess anstoßen, indem Sie alle wichtigen Variablen global angeben. Dadurch ist es einfacher, die Variablen im gesamten Programm zu verstehen und zu verwenden.
Fahren Sie danach mit der Hauptfunktion fort, die die erste Ausführung initiiert. Sie werden sich also eine Setup-Funktion einfallen lassen, die die gesetzten Pins und ihre Funktionen hervorhebt.
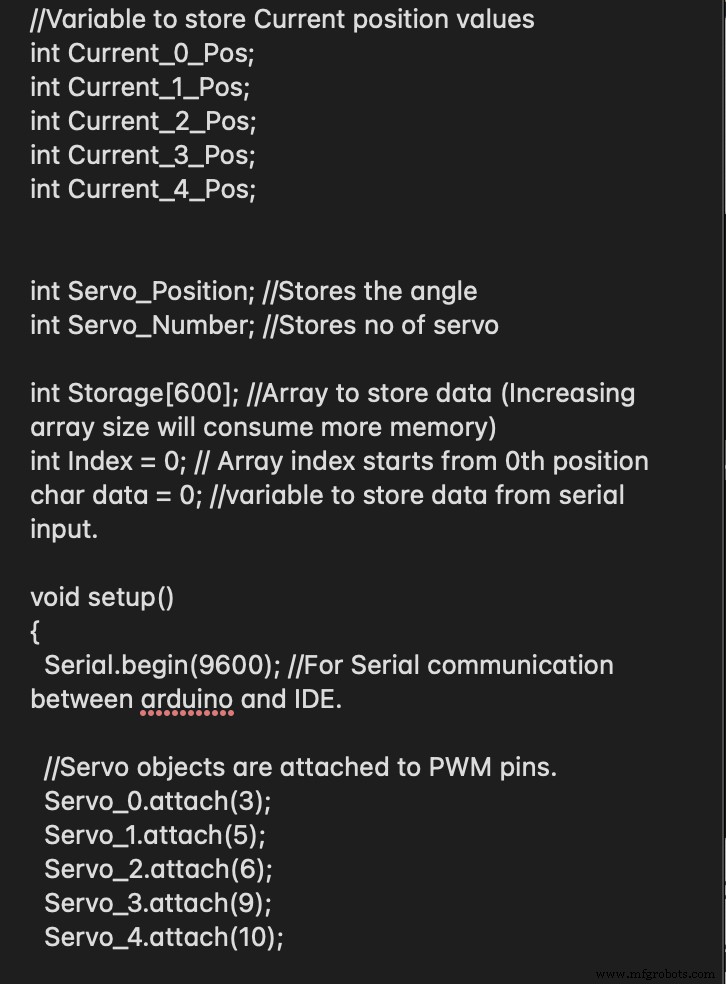
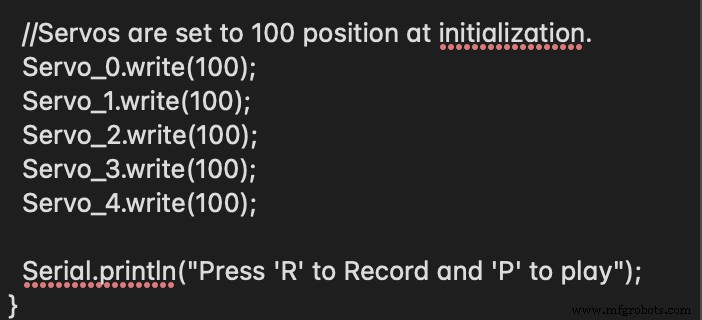
Wenn Sie das haben, besteht die nächste Aufgabe darin, die analogen Eingangspins zu verwenden, um die Werte des Potentiometers zu erhalten. Außerdem helfen die analogen Eingangspins, die Werte zuzuordnen – was hilft, die Servos zu regulieren.
Jetzt ist es an der Zeit, die benutzerdefinierte Funktion zu benennen. Im folgenden Code haben wir Mop_Pat;.
gewählt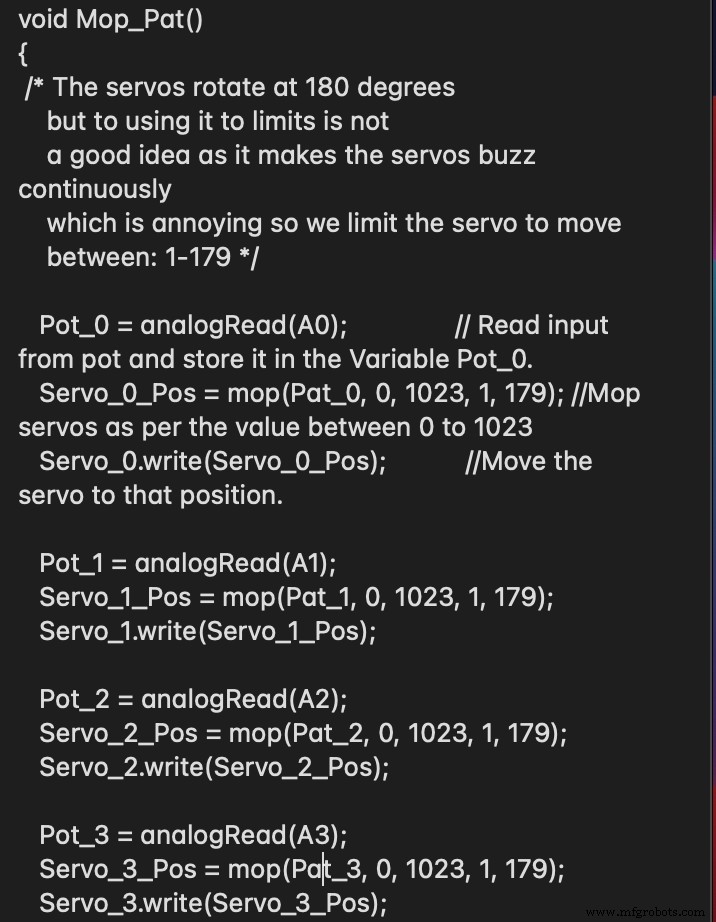
Damit können Sie die Loop-Funktion ablegen. Wenn Sie mit dem Code fertig sind, können Sie ihn auf das Arduino-Board übertragen.
Damit funktioniert Ihr Roboterarm. Außerdem können Sie bei Bedarf einige Änderungen am Code vornehmen, um einen reibungsloseren Betrieb zu gewährleisten.
Schritt 4 – Auswärts testen
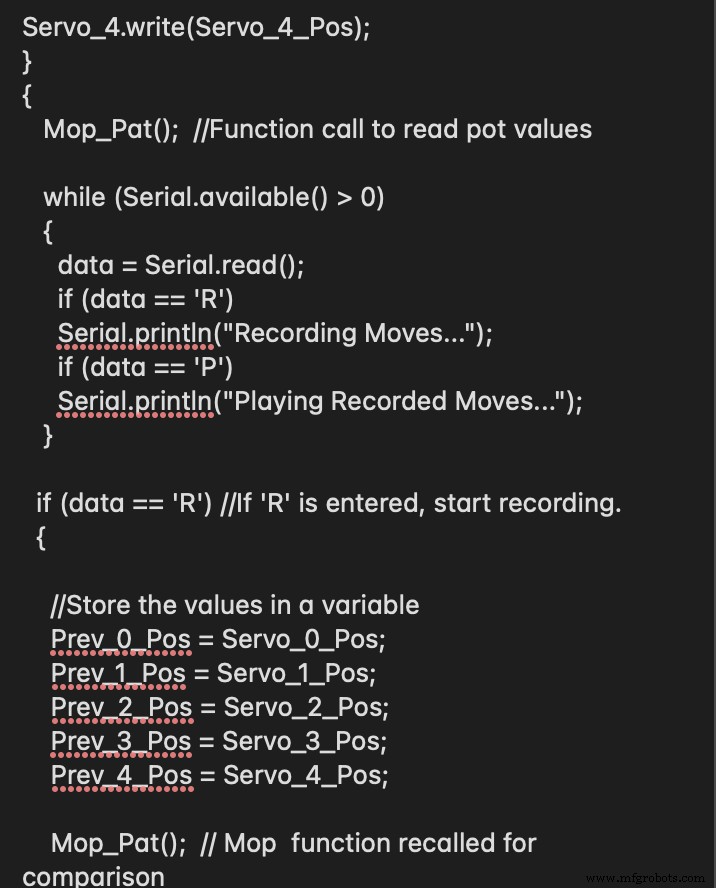
Wenn Sie mit der Übertragung des Codes auf das Board fertig sind, gehen Sie zur Option Tools. Gehen Sie in dieser Option zu „Serial Monitor“. Wenn Sie auf diese Funktion klicken, hilft es Ihnen, den Arduino zurückzusetzen. Und es ermöglicht Ihnen, den Master-Arm zu verwenden, um den Roboterarm einfach zu steuern. Zu diesem Zeitpunkt können Sie jedoch noch keine Bewegung aufzeichnen.
Sie müssen also „R“ auf dem Monitor eingeben, um alle Züge aufzuzeichnen. Wenn Sie alle Ihre Züge aufgezeichnet haben, geben Sie „P“ ein. Diese Funktion hilft, alle Bewegungen zu wiederholen. Und das Beste daran ist, dass die Servos die Bewegungen weiter ausführen – solange Sie das Board nicht zurücksetzen.
Andere Arduino-Roboterarm-Projektideen
Wenn Sie der Meinung sind, dass das obige Projekt zu einfach ist, können Sie gerne andere Arduino-Armrobotik-Projektideen ausprobieren, wie zum Beispiel:
Der Roboterarm mit Gestensteuerung (Arduino + Kinect)
Handgesteuerter Roboterarm
Quelle:Wikimedia Commons
Bei diesem Projekt wird ein Roboterarm mit Gesten gesteuert. Und Sie können die Gesten mit einem Kinect-Sensor erfassen. Also entwickelten die Ingenieure den Roboterarm, um die Bewegung des Ellbogens, des rechten Arms, der Hand und des Ellbogens nachzuahmen. Außerdem haben sie dieses Werkzeug mit Servomotoren entwickelt.
Ein webgesteuerter Roboterarm

Webgesteuerter Roboterarm
Der webgesteuerte Roboterarm ist eine weitere bemerkenswerte Erfindung. Das Tool zeigt Ihnen die Möglichkeit, den Armroboter mit einem Webserver zu koordinieren. Interessanterweise wird dieses Gerät von einer externen Quelle mit Strom versorgt und es werden etwa sechs Servomotoren verwendet.
Um dies zu erreichen, müssen Sie also den Arbeitsablauf studieren, den Quellcode zur Kenntnis nehmen und die Systemarchitektur verstehen.
Nunchuck-gesteuerter Arduino-Roboterarm
Diese Projektidee zeichnet sich durch ihre Einzigartigkeit aus. Mit diesem Projekt lernen Sie, wie Sie ein Arduino Mega verwenden, um das Gerät zu programmieren und einen Armroboter effektiv zu montieren. Sie können dieses Tool auch mit dem Nintendo Nunchuk steuern.
Und das Beste daran ist, dass der Nunchuk viele Sensoren hat. Außerdem ist es leicht verfügbar und billig. Wenn Sie also diesen Roboterarm bauen möchten, ist es wichtig, eine Liste der benötigten Werkzeuge und des Codes zu erhalten.
Android-App-gesteuerter Arduino-Roboterarm

Roboterarm in der Produktionslinie
Dieser Roboterarm ist ein weiteres Aufgabenprojekt, das Sie auswählen können. Das Gerät verwendet ein Bluetooth-Modul neben dem Arduino über eine Android-App. Zu den Werkzeugen, die Sie zum Bau dieses Roboterarms benötigen, gehören jedoch ein generischer Motor mit einem Bluetooth-Modul (HC-05) und ein Arduino Mega 2560.
Die drahtlos gesteuerte Roboterhand
Die Wahl dieses Projekts ist ideal, wenn Sie wissen möchten, was es braucht, um eine Roboterhand zu bauen. Außerdem lernen Sie, wie Sie dieses Tool steuern. Außerdem benötigen Sie Werkzeuge wie den zugehörigen Sensor, Batterien, Arduino-Platine und Servomotor, um diese Roboterhand mit einem drahtlosen Handschuh zu bauen.
Der Arduino-Barkeeper-Roboterarm

Arduino-Barkeeper-Roboterarm
Quelle:WorldArchitecture
Der Barkeeper-Roboterarm ist das Projekt, auf das Sie aufspringen können, wenn Sie nach einem lustigen Projekt suchen, das Gäste beeindrucken wird. Dieses Tool hat normalerweise einen RobotGeek Snapper Arm. Außerdem hat es einen Ventilinjektor, der seine Barkeeper-Funktion verstärkt. Dieses Projekt wird also gute Arbeit leisten, um Getränke aus einem Behälter in Ihr Glas zu bringen.
Computermausgesteuerter Arduino-Roboterarm
Dieses Projekt ist ideal, wenn Sie ein Arduino-Armprojekt lieben, das Sie mit Ihrer Computermaus steuern können. Das Beste daran ist, dass dieser Arduino-Roboterarm seine Entscheidung treffen kann, indem er Bilder verarbeitet. Wie? Das Tool tut dies mit Hilfe der Matlab-Vision-Software.
Schlussworte
Das Roboterarm-Projekt entwickelt sich schnell zu einer Sache in der Welt. Und es ist befriedigend zu sehen, dass diese Geräte Gegenstände transportieren, Dinge mit Präzision balancieren und stapeln – je nach Typ. Und sie sind hilfreich für medizinische Anwendungen und die Weltraumforschung.

Roboterarm in der Fabrik
Es ist also ein ausgezeichneter Zeitpunkt, um die kostengünstige Version dieses Tools zu erstellen – insbesondere, wenn Sie keine wiederkehrenden Aufgaben erledigen möchten. Benötigen Sie Starthilfe? Nehmen Sie gerne Kontakt mit uns auf.
Industrietechnik
- Makerarm:Ein megacooler Roboterarm für Maker
- Die Schritt-für-Schritt-Anleitung des Fertigungsleiters zur Steigerung des Website-Traffics
- Roboterarm:Wie wird er hergestellt?
- Was ist ein Robotermanipulator? Ein Leitfaden
- Der ultimative Leitfaden für Roboterpalettierer
- Hydraulischer Roboterarm in der Fertigungsindustrie:Ein definitiver Leitfaden
- Arduino 3D-gedruckter Roboterarm
- Roboterarmmarkt soll bis 2026 auf 14,78 Milliarden US-Dollar wachsen
- RTC-Modul:Der absolute Leitfaden für ein einfaches Projekt
- Der industrielle Roboterarm – ein Produktionsboom