


Walbi, der wandelnde Zweibeiner
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 10 | ||||
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
|
Apps und Onlinedienste
 |
|
Über dieses Projekt
Wäre es nicht großartig, wenn wir einen zweibeinigen Roboter mit einigen Servos bauen könnten? Der Innere Geek dachte so und das ist das Ergebnis…
Das ist Walbi, der WALink BIped, ein Roboter, den wir für ein Machine-Learning-Projekt entwickelt haben, der nie auf die Beine kam (Walbi auch nicht, aber das liegt daran, dass er mit beiden Füßen fest auf dem Boden steht).
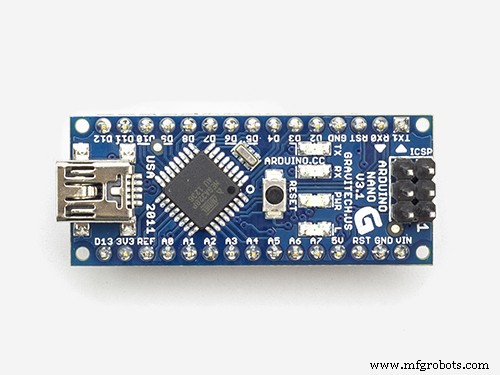
Walbi verwendet einen Arduino Nano für "Gehirn", LX-16A-Servos für "Muskeln" und 3D-gedruckte Kunststoffteile für "Knochen". Die LewanSoul LX-16A Servos sind Traumservos für kleine(ishe) Roboterprojekte, da sie leicht sind, über 19 kg.cm bewegen können und mit einem einzigen Kabel verbunden sind, das von Servo zu Servo verläuft, was die Verkabelung zum Roboter kinderleicht macht spielen.
Walbi ist ein Humanoid im Maßstab 2:1 und seine Beine sind 55 cm (21,7 Zoll) von der Ferse bis zur Taille hoch und wiegen 1, 1 kg (2,4 lbs). Die weißen Körperteile wurden 3D-gedruckt, hätten aber genauso gut aus leichtem, stabilem Holz sein können.
Die Programmierung von Walbi ist sehr einfach. Sie können unten die beiden Programme herunterladen, die für die Bewegungsaufnahme und -wiedergabe erforderlich sind, und damit können Sie Walbi zum Laufen, Krabbeln, Klettern, Springen oder Tanzen bringen! Sie müssen nur seine Beine in eine gewünschte Pose bewegen, diese Pose aufnehmen, Walbi in eine andere Pose formen, sie aufnehmen usw. und dann, wenn Sie die vollständige Sequenz aufgenommen haben, können Sie sich zurücklehnen und zusehen, wie sie die bewegt du es dir beigebracht.
Vielleicht kannst du deinem Riverdance beibringen 😀
Bau des Walbi
Walbi wurde mit einem FlashForge Creator Pro-Drucker aus PLA-Kunststoff in 3D gedruckt. Sie können die STL-Dateien von Thingiverse herunterladen oder eine alternative Methode verwenden, um die Füße, die Beinknochen und die Taille aus Holz oder Metall zu bauen. Die Servostützen werden an diesen Teilen, an den Servos und aneinander befestigt.
Um die Servos an den bedruckten Teilen und aneinander zu befestigen, benötigen Sie Metallhalterungen der vier verfügbaren Typen (weitere Informationen und Fotos finden Sie im Blog von Release The Inner Gook).
Verkabelung
Um die LX-16A Servos zu steuern, benötigen Sie ein LewanSoul Debug Board.
Es empfängt Befehle von einem seriellen Port auf dem Arduino Nano. Da wir die serielle Hardware des Arduino zur Kommunikation mit dem Computer verwendeten, hatten wir die SoftwareSerial-Bibliothek verwendet, um einen zweiten seriellen Port auf dem Nano zu erstellen, um eine Verbindung zum Debug Board herzustellen.
Bei seriellen Servos wird der Verdrahtungsaufwand minimiert. Es gibt ein Kabel von jedem Servo zum nächsten (serielles Kabel wird mit den Servos geliefert) und die Servos an der Hüfte stecken direkt in das Debug Board. Ihr Computer wird mit dem USB-Port des Arduino verbunden und das Arduino wird mit dem Debug Board über drei Jumper-Drähte (TX, RX und GND) verbunden, die mit den Arduino-Pins verbunden sind, die Sie für SoftwareSerial konfigurieren – wir haben die Pins 10 und 1 im Code verwendet1 .
Die Servos verwenden eine Baudrate von 115200 (wenn Sie wissen, wie man sie ändern kann, sagen Sie es uns, da dies zu hoch ist). Diese Baudrate ist für SoftwareSerial hoch, daher mussten wir Fehlerprüfungs- und Wiederholungsfunktionen implementieren. In einigen Fällen war Beharrlichkeit erforderlich, um einen korrekten Messwert zu erhalten.
Leistung
Die Servos können 19,5 kg.cm bei 7,4 V bereitstellen. Wir haben 6 V verwendet und der Stallstrom lag unter drei Ampere.
Programmierung
Sie können den Arduino-Code im Github-Repository des Projekts abrufen.
Zwei Programme werden für Motion Capture und Replay verwendet, eine Technik, die der in Filmen verwendeten ähnelt. Sie beginnen damit, den Roboter in eine Pose zu formen. Da die Servos standardmäßig ausgeschaltet sind, können Sie die Servos von Hand drehen. Sobald Sie den Roboter in der gewünschten Pose haben, können Sie mit dem Programm Walbi_record alle Servowinkel auslesen und anzeigen. Anschließend geben Sie diese Winkelmesswerte in die Variable poseAngles in Walbi_play ein und verwenden das Programm, um die aufgezeichnete Posensequenz mit einer Geschwindigkeit abzuspielen, die mit der Variablen timeToMove (in Millisekunden) festgelegt wurde.
Wir hoffen, Ihnen hat das Projekt gefallen. Fühlen Sie sich frei, Ihre Liebe zu teilen, indem Sie einen Kommentar hinterlassen, den Blog abonnieren oder eine andere Art von Feedback-Aktion durchführen. Wir wissen es zu schätzen!
Innere Geek-Nuggets
Hier sind einige Tipps und Tricks, die Sie beim Erstellen von Walbi gelernt haben:
- Die Halterungen für das LX-16A werden nur in EINER Position am Servo befestigt, daher ist es sehr einfach, sie falsch anzuschließen, insbesondere an den 3D-gedruckten Teilen. Wir mussten Walbi ein paar Mal wieder zusammenbauen, um schwer zu erkennende Montagefehler zu korrigieren.
- Die Servos wurden standardmäßig mit der ID 1 geliefert. Weisen Sie jedem Servo eine andere ID zu, bevor Sie sie am Roboter montieren, oder es ist unmöglich, mit mehreren angeschlossenen seriellen Servos mit derselben ID zu kommunizieren.
- Die Verwendung von Kabelbindern verbessert das Erscheinungsbild wirklich
- Die Servos werden mit den erforderlichen Schrauben geliefert, um die Hörner mit den Servos und die Hörner mit den Halterungen zu verbinden. Die Halterungen werden mit den erforderlichen Schrauben geliefert, um sie an den Servos zu befestigen. Sie müssen Schrauben für die Halterung an den Anschlüssen und die Halterung an der Kunststoffteilverbindung separat erwerben. Wir haben DIN912 M2-6 und M2-10 Schrauben und Muttern verwendet.
- Sie können die Traktion verbessern, indem Sie Silikonpolster auf die Fußsohlen des Roboters kleben.
- Es ist vorzuziehen, Servohörner aus Metall zu verwenden, da die mit den Servos gelieferten Kunststoffhörner reißen, wenn (wenn) die Beine während des Tests ineinander schlagen. Wenn die Hörner reißen, wird der Roboter locker und die Bewegungswiedergabe verliert an Genauigkeit (was ansonsten überraschend gut ist).
Code
Arduino-Programme für Bewegungssteuerung und Wiedergabe
https://github.com/ptavaressilva/WalbiKundenspezifische Teile und Gehäuse
STL für 3D-gedruckte Teile
Ursprünglich gedruckt auf einer Flash Forge Creator ProCAD-Datei auf thingiverse.comHerstellungsprozess