


7 Ressourcen zum Verständnis von Trägheit und Trägheitsinkongruenz
Bei der Dimensionierung des am besten geeigneten Motors für eine bestimmte Anwendung sind Faktoren wie Lastträgheit und Motorträgheit von entscheidender Bedeutung. (Über:Die Mysterien der Inertia Mismatch verstehen’)
Wenn mechanische Komponenten wie Kupplungen, Wellen und Riemen unendlich steif wären, wäre es möglich, Motoren allein nach Drehmoment- und Drehzahlanforderungen zu dimensionieren. Leider ist dies nicht der Fall.
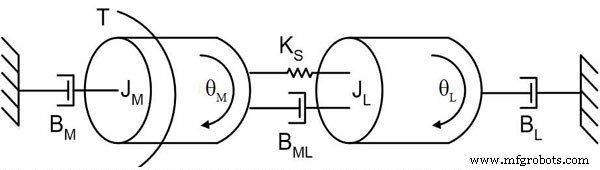
In einem nachgiebig gekoppelten Motor und einer nachgiebigen Last beeinflussen eine Reihe von Faktoren die mechanischen Resonanzen des Systems, einschließlich der Rotorträgheit des Motors (JM ), die Lastträgheit (JL ), die Kopplungselastizität (KS ), das aufgebrachte Drehmoment (T) und die viskose Dämpfung der Kupplung (BML ), zwischen Boden und Rotor (BM ) und zwischen Boden und Last (BL ). Abbildung mit freundlicher Genehmigung von Kevin Craig, Hofstra University.
Jede dieser mechanischen Komponenten hat eine gewisse Nachgiebigkeit, das heißt, wenn der Motor versucht, eine Last zu bewegen, entstehen Schwingungen mit Resonanzfrequenzen. Eine erfolgreiche Motordimensionierung erfordert ein gewisses Verständnis der Trägheit, also werfen wir einen Blick auf einige Schlüsselkonzepte.
Trägheit ist der Widerstand eines physischen Objekts gegen jede Änderung seiner Geschwindigkeit. Mit zunehmender Trägheit nimmt auch der Widerstand gegen Beschleunigung/Verzögerung zu. Das Lastträgheitsmoment, auch als Trägheitsmoment bezeichnet, ist definiert als der Widerstand eines physikalischen Objekts gegen jede Änderung seiner Geschwindigkeit, aus Sicht der Drehachse .
Das Trägheitsmoment (normalerweise geschrieben als J ) in einem Servosystem lässt sich in zwei Teile unterteilen:die Lastträgheit und die Motorträgheit. Das Trägheitsmomentverhältnis ist das Trägheitsmoment der Last geteilt durch das Trägheitsmoment des Motors. Trägheitsfehlanpassung bezieht sich auf den Unterschied der physikalischen Trägheit zwischen dem Motor und der Last.
Um bei der Motordimensionierung zu helfen, stellen die Motorhersteller normalerweise Informationen zur zulässigen Lastträgheit bereit. Das Überschreiten der zulässigen Last kann zu Leistungseinbußen, Vibrationen und Abwürgen führen.
Denken Sie daran, dass es keine Formel zur Berechnung eines idealen Trägheitsverhältnisses gibt – es muss für jede Anwendung berechnet werden.
Hohe Last-zu-Motor-Trägheitsverhältnisse verringern die Betriebsbandbreite der Maschine, lassen den Motor härter arbeiten als er sollte und führen oft zu längeren Einschwingzeiten, was zu verringerten Gesamtleistung.
Eine Möglichkeit, das Trägheitsverhältnis zu reduzieren, besteht darin, Getriebe zu verwenden, da das Übersetzungsverhältnis einen umgekehrten quadratischen Effekt auf die Trägheit der Last hat. Dies ermöglicht einen Betrieb mit höherer Geschwindigkeit und/oder kleinere und billigere Motoren. Ein anderer Ansatz besteht darin, auf einen größeren Motor mit größerer Trägheit umzuschalten.
Darüber hinaus verfügen die modernen Servos von heute über Antriebssteuerungsalgorithmen, die verwendet werden können, um Resonanzeffekte zu bekämpfen, was den Einsatz von Systemen mit höherem Übersetzungsverhältnis für bestimmte Anwendungen ermöglicht.
Die Trägheit des Rotors kann durch Änderungen an Materialien, Abmessungen und Designs (wie das hier gezeigte "Auto-Rad"-Design) angepasst werden. Kredit:A3
Hier sind 7 nützliche Ressourcen zum Erkunden von Trägheits- und Trägheitsinkongruenzen-Themen:
- Die Mysterien der Inertia Mismatch verstehen:Dieser ausführliche Artikel aus den A3-Archiven bietet eine detaillierte Aufschlüsselung des Themas, einschließlich Gleichungen. Konzentriert sich darauf, wie Trägheit und Kupplungssteifigkeit kombiniert werden, um Instabilitäten im Servoachsenbetrieb zu erzeugen – und wie dieses Problem gelöst werden kann.
- Grundlagen zur Auslegung von Servomotoren:Yaskawa Americas hervorragende Reihe kostenloser Online-E-Learning-Module für die Robotik enthält dieses Video zu den wichtigsten Konzepten der Motordimensionierung wie Spitzendrehmoment, RMS-Drehmoment, Trägheitsverhältnis , und Geschwindigkeit.
- Robot Academy Trägheitsvideos:Die kostenlose Online-Roboterakademie der Queensland University of Technology bietet mehrere Videos zum Thema Trägheit in verschiedenen Bewegungssteuerungs- und Robotikkontexten.
- Grundlagen der Motordimensionierung:Lastträgheit:Ein kompakter Leitfaden zum Thema Massenträgheit vom führenden Motorenhersteller Oriental Motor.
- Online-Trägheitsverhältnis-Rechner:Destaco hat ein nützliches Online-Tool bereitgestellt, das Ihnen bei der Berechnung von Trägheitsverhältnissen hilft.
- Das Trägheitsverhältnis und seine Auswirkung auf die Maschinenleistung verstehen:Ein ausgezeichnetes Whitepaper von Mitsubishi Electric, das die Grundlagen des Trägheitsverhältnisses und die Gefahren erklärt, wenn man grobe Faustregeln bei der Dimensionierung von Motoren befolgt.
- Lösungen zur Reduzierung der Schrittmotorresonanz:Wussten Sie, dass Sie durch Anpassung des Motors und/oder Änderung der Lastträgheit die Schrittmotorresonanz reduzieren können? Erfahre mehr in diesem Artikel aus dem A3-Archiv.
Industrieroboter
- Renesas erweitert RX24T- und RX24U-MCU-Reihe für Motorsteuerungsanwendungen
- Nanotec:kompakte Motorsteuerung für bürstenlose Gleichstrommotoren und Schrittmotoren
- Leitfaden zum Verständnis von Lean und Six Sigma für die Fertigung
- 3 Vorteile der Robotersimulation für Hersteller und andere Roboterbenutzer
- Tipps für die Reparatur und Fehlerbehebung von Servomotoren
- Informationen und Ressourcen zum Coronavirus (COVID-19)
- Die Vorteile und Herausforderungen der Hybridfertigung verstehen
- Grundlegendes zum Startermotor des Motors
- Nicht erneuerbare Energiequellen verstehen
- Schraube und Bolzen verstehen