


Verwandeln Sie Ihr RC-Auto in ein Bluetooth-RC-Auto
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
|
Apps und Onlinedienste
| |
|
Über dieses Projekt




Es macht wirklich Spaß, RC-Autos zu hacken, und sie bieten ein gutes Chassis zu einem niedrigen Preis, um Roboter zu bauen, aber die Auswahl eines zu bauen ist eine Qual mit Millionen von Typen. Mein kleiner Bruder hatte vor kurzem Geburtstag und ich wollte ihm etwas wirklich Cooles schenken, am Ende habe ich ihm dieses RC-Auto geschenkt. RC-Car-Hacking sind einfach und schwierig, da RC-Cars auf unterschiedliche Weise hergestellt werden, ist es nicht einfach und definiert, das Auto zu hacken, aber dieser Hack ist universell. Ich werde auch versuchen, die Grundlagen zu allen Teilen und der Theorie hinter jedem Modul abzudecken. Wir haben Module verwendet, aber Sie werden ermutigt, unsere Schaltung zu machen, außer dem Pro Mini.
Promini war mir wirklich unangenehm, da es zu klein war, aber es hat Spaß gemacht.
Sieh dir das Video an und abonniere für kommende Videos
Schritt 1:Das richtige Chassis finden



Teileliste
- ProMini
- L293d-Modul
- hc-05
- RC-Auto
Das richtige Chassis finden
Die Wahl des Chassis ist eine Frage des Antriebsmechanismus. Es gibt viele Antriebsmechanismen.
Lassen Sie uns über die beiden beliebtesten Mechanismen sprechen.
Differentialantrieb Was ist Differenzialantrieb?
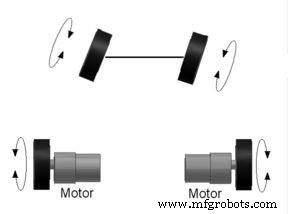
Der Begriff Differential bedeutet Unterschied zwischen zwei Entitäten, im Kontext der Robotik ist es nur der Geschwindigkeitsunterschied zwischen zwei Motoren. Basierend auf diesem Geschwindigkeitsunterschied kann ein Roboter auf einem 2D-Layout in jede Richtung bewegt werden.
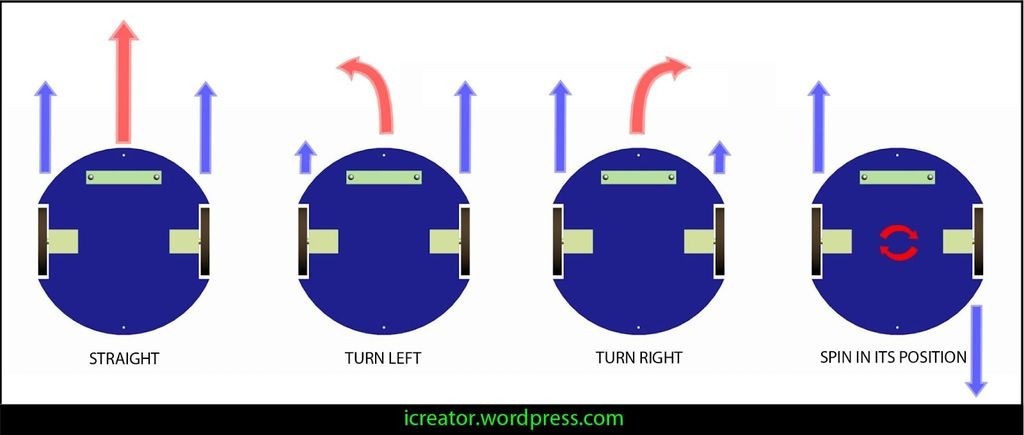
Wenn zwei Motoren mit Rädern in einer Reihe verbunden sind, bestimmt die Geschwindigkeit, mit der sich jeder Motor dreht, die Bewegungsrichtung. Wenn sich beide Räder mit der gleichen Geschwindigkeit drehen, beträgt die Differenz zwischen den Motoren Null. Dadurch bewegt sich der Roboter geradlinig vorwärts. Der Roboter kann sich in umgekehrter Richtung bewegen, wenn die Drehrichtung beider Motoren umgekehrt wird. Dies ist wieder eine gerade Linie, wenn die Geschwindigkeitsdifferenz null ist. Wenn Sie nun die Geschwindigkeit eines beliebigen Motors ändern, führt dies zu einer Bewegung in eine Richtung weg von der geraden Linie. Zum Beispiel führt das Verringern der Geschwindigkeit des rechten Motors zu einer Geschwindigkeitsdifferenz und damit zu einer Richtungsänderung. Die resultierende Kraft ist so, dass der Roboter nach rechts dreht. Diese Richtungsänderung kann durch weitere Reduzierung der Motordrehzahl auf den erforderlichen Winkel gesteuert werden. Langsamer ist der richtige Motor, schärfer ist die Drehung nach rechts. Dies ist genau das gleiche für Linksabbiegen.
Fazit:Langsamerer Rechtsmotor, schärfere Rechtskurve. Langsamerer linker Motor Schärfere Linkskurve. Nachfolgend sind einige Szenarien aufgeführt, die die Funktionsweise des Differentialantriebsmechanismus erklären. M1 und M2 sind Motoren, die die Räder links bzw. rechts antreiben.
Steuerungstyp-Antrieb
Was ist ein Lenkantrieb?
Der Autoantrieb ist in der realen Welt am häufigsten, aber nicht in der Roboterwelt. Es zeichnet sich durch ein Paar Antriebsräder und ein separates Paar Lenkräder aus. Translation und Rotation sind unabhängig voneinander. Aber Translation und Rotation sind miteinander verbunden, daher steht dieses System vor einem ernsthaften Wegplanungsproblem. Vier Räder sind effizienter als drei oder zwei Räder. Die ersten beiden der vier Räder dienen zum Lenken und die nächsten beiden zum Antrieb des Roboters. Das Ausbalancieren eines vierrädrigen Roboters ist nie ein Problem. Die meisten alltäglichen Autos, die wir benutzen, sind vierrädrig und das Beispiel reicht aus, um seine Existenz und seine Fähigkeiten zu beweisen.
Nachteile des Autotyps :Der Drehmechanismus muss genau gesteuert werden. Eine geringfügige Ungenauigkeit kann zu großen Odometriefehlern führen Das System ist nicht holonomisch, daher ist die Bahnplanung äußerst schwierig und ungenau Es gibt keine direkten Richtungsaktuatoren
Daher ist es aufgrund seiner Einfachheit und Benutzerfreundlichkeit besser, einen Differentialantrieb zu verwenden.
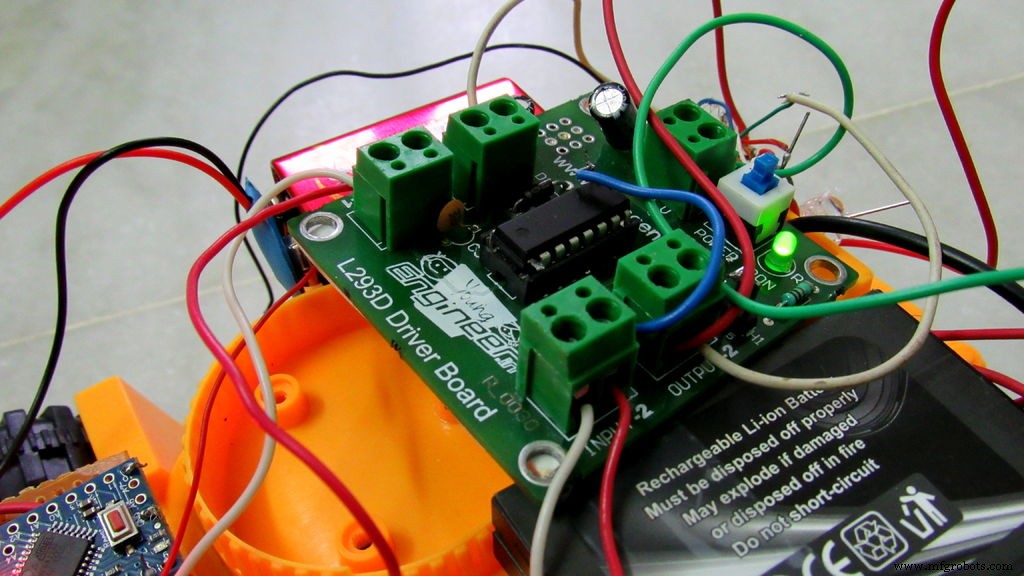
Schritt 2:Steuerung der Motoren
Um den Motor zu steuern, brauchen wir etwas, das als Motortreiber bezeichnet wird.
Was ist ein Autofahrer?
Ein Motortreiber ist ein kleiner Stromverstärker; Die Funktion von Motortreibern besteht darin, ein Steuersignal mit niedrigem Strom zu nehmen und es dann in ein Signal mit höherem Strom umzuwandeln, das einen Motor antreiben kann.
Es gibt viele Motortreiber, von denen ich das l293d-Motortreibermodul verwende.
L293D ist eine integrierte Motortreiberschaltung, die verwendet wird, um DC-Motoren anzutreiben, die sich in beide Richtungen drehen. Es handelt sich um einen 16-Pin-IC, der einen Satz von zwei Gleichstrommotoren gleichzeitig steuern kann. Der L293D verwendet 5 V für seine eigene Stromversorgung und eine externe Stromquelle wird benötigt, um die Motoren anzutreiben, die bis zu 36 V betragen und bis zu 600 mA ziehen können. Der L293D arbeitet nach dem Konzept einer typischen H-Brücke, einer Schaltung, die es ermöglicht, die Hochspannung in beide Richtungen zu leiten. In einem einzigen L293D-IC befinden sich zwei H-Brückenschaltungen, die zwei Gleichstrommotoren unabhängig voneinander drehen können.
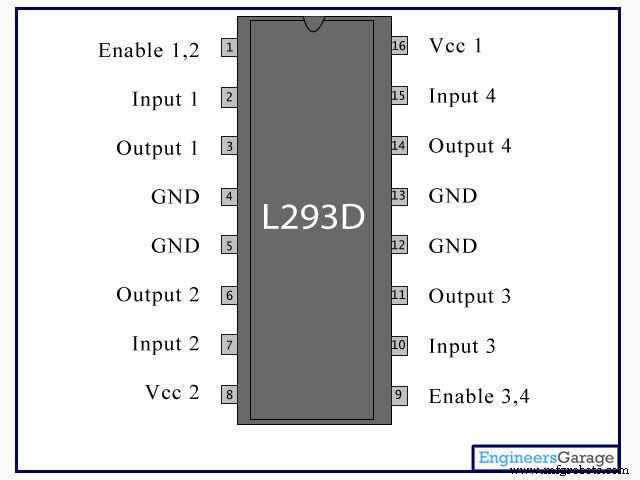
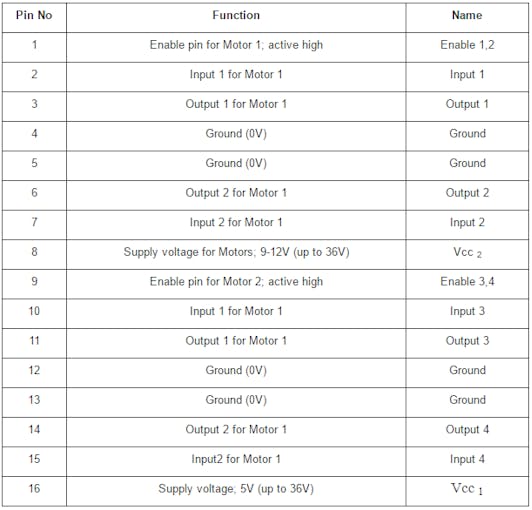
Pin-Beschreibung von L293d
1Enable-Pin für Motor 1; aktiv hoch Freigabe 1,2 2 Eingang 1 für Motor 1 Eingang 1 3 Ausgang 1 für Motor 1 Ausgang 1 4 Masse (0V) Masse 5 Masse (0V) Masse 6 Ausgang 2 für Motor 1 Ausgang 2 7 Eingang 2 für Motor 1 Eingang 2 8 Versorgungsspannung für Motoren; 9-12V (bis zu 36V) Vcc 2 9 Enable-Pin für Motor 2; active high Enable 3,4 10 Eingang 1 für Motor 1 Eingang 3 11 Ausgang 1 für Motor 1 Ausgang 3 12 Masse (0V) Masse 13 Masse (0V) Masse 14 Ausgang 2 für Motor 1 Ausgang 4 15 Eingang2 für Motor 1 Eingang 4 16 Versorgungsspannung; 5V (bis 36V) Vcc 1
Schritt 3:Über die App
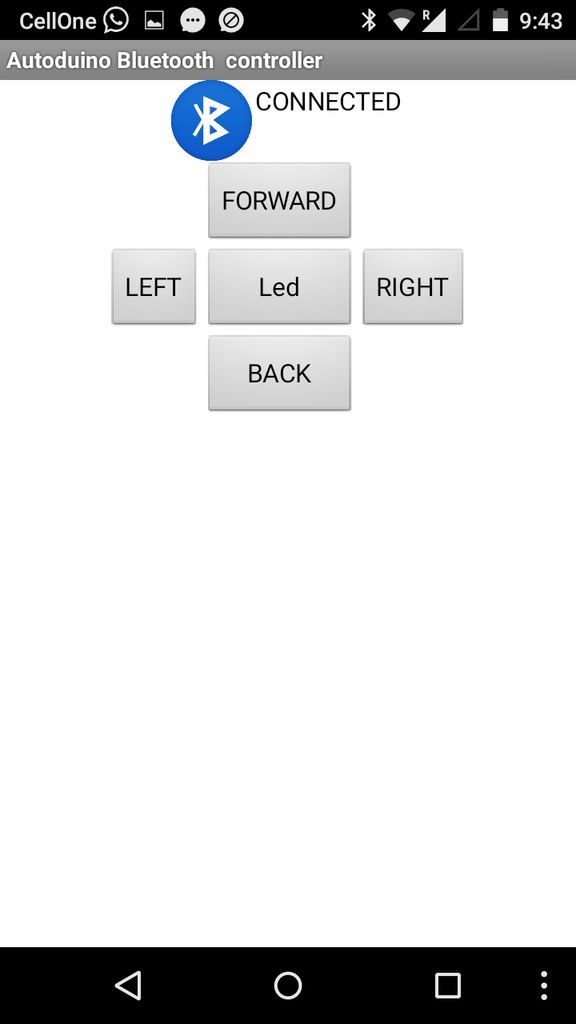


Es gibt viele Apps zur Steuerung, die ich mit einer erstellt habe. Die Logik ist sehr einfach, alle Tasten senden ein Zeichen, wenn sie über Bluetooth gedrückt werden, und das Arduino verarbeitet es.
Zeichenfunktionen
X Null-Zustand F Vorwärtsbewegung B Rückwärtsbewegung L Links abbiegen R Rechts abbiegen
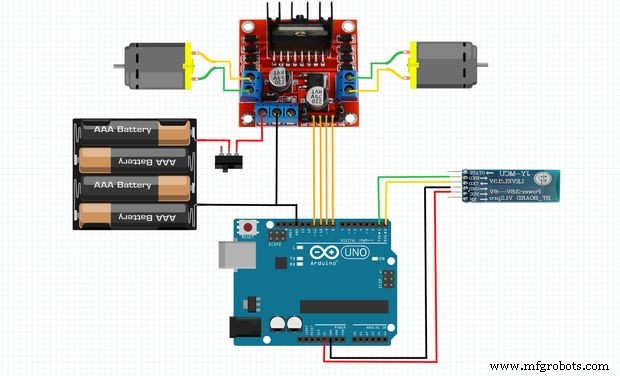
Schritt 4:Verbinden Sie alle Teile
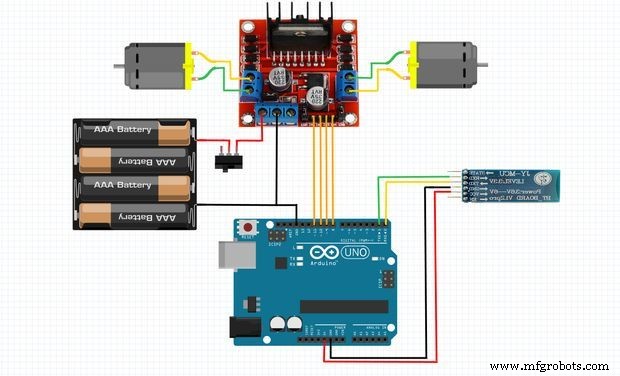

Verbindungen sind einfach
hier sind die verbindungen wie folgt
Das Bluetooth-Modul
Hc-05 Arduino Vcc 5v Gnd Gnd Rx Tx Tx Rx
Der Autofahrer
Motortreiber Arduino Pin 2 8 Pin 7 7 Pin 10 6 Pin 4 9 Pin 3 und 6 Motor 1 Pin 11 und Pin 14 Motor 2 Pin 1 5V Pin 9 5V
Schritt 5:Codieren


void setup() {Serial.begin(9600));pinMode(8, OUTPUT);pinMode(7, OUTPUT);pinMode(9, OUTPUT);pinMode(6, OUTPUT); pinMode(5, AUSGANG); pinMode (4, AUSGANG); digitalWrite (4, NIEDRIG); digitalWrite(5,LOW);} // die Schleifenfunktion wird immer wieder ausgeführt forevervoid loop() {var=Serial.read();if(var=='F'){digitalWrite(6,LOW);digitalWrite( 7,HIGH);digitalWrite(8,LOW);digitalWrite(9,HIGH);} if(var=='H'){ digitalWrite(frled1,HIGH);}if(var=='B'){ analogWrite( beschleunigen,150); digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); digitalWrite(bcled1,HIGH);}if(var=='X'){digitalWrite(9,LOW);digitalWrite(8,LOW);digitalWrite(7,LOW);digitalWrite(6,LOW); digitalWrite (frled1, LOW); digitalWrite(bcled1,LOW);}if(var=='L'){digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW);}if(var =='R'){digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);;}} Ich hoffe, es macht Ihnen Spaß, das Projekt so zu gestalten, wie ich es getan habe. Ich werde bald weitere coole Projekte veröffentlichen, also folgen Sie mir, um alle Updates zu erhalten. Liken Sie auch meine Seite https://www.facebook.com/makewithRex/
F09ZCJSIP2UG2XP.ino
Code
- Code-Snippet Nr. 1
Code-Snippet Nr. 1Nur-Text
void setup () { Serial.begin (9600); pinMode (8, AUSGANG); pinMode (7, AUSGANG); pinMode(9, AUSGANG); pinMode(6, AUSGANG); pinMode(5, AUSGANG); pinMode (4, AUSGANG); digitalWrite (4, NIEDRIG); digitalWrite(5,LOW);} // die Schleifenfunktion wird immer wieder ausgeführt forevervoid loop() { var=Serial.read(); if(var=='F') { digitalWrite(6,LOW);digitalWrite(7,HIGH);digitalWrite(8,LOW);digitalWrite(9,HIGH); } if(var=='H') { digitalWrite(frled1,HIGH); aufrechtzuerhalten. Wenn (var=='B') { analogWrite (speeden,150); digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); digitalWrite (bcled1, HIGH); } if(var=='X') {digitalWrite(9,LOW); digitalWrite(8,LOW); digitalWrite(7,LOW); digitalWrite(6,LOW); digitalWrite (frled1, LOW); digitalWrite(bcled1,LOW); } if(var=='L') {digitalWrite(6,LOW);digitalWrite(7,LOW);digitalWrite(8,HIGH);digitalWrite(9,LOW); } if(var=='R') {digitalWrite(6,HIGH);digitalWrite(7,LOW);digitalWrite(8,LOW);digitalWrite(9,LOW);; }} Schaltpläne
Herstellungsprozess
- C#-Konstruktor
- Verwandeln Sie Ihren Raspberry Pi in einen Hamster-Fitness-Tracker
- Ihr Smartphone und das vernetzte Auto
- Wie Sie Ihre Lieferkette in ein Profitcenter verwandeln
- Wie verwandeln Sie Ihre kreativen Designs in Realität?
- So reparieren Sie Ihre Auto-Klimaanlage in wenigen Schritten
- Wie wählt man einen Turbolader für sein Auto aus?
- So reparieren Sie Ihren Autotürgriff
- So laden Sie Ihre Autoklimaanlage auf
- Wie kann man Rost an seinem Auto reparieren?